虚拟环境下基于逆运动学的电缆建模与仿真技术
2013-09-12何大闯闫静左敦稳居露洪伟
何大闯,闫静,左敦稳,居露,洪伟
(南京航空航天大学机电学院,江苏南京 210016)
虚拟环境下基于逆运动学的电缆建模与仿真技术
何大闯,闫静,左敦稳,居露,洪伟
(南京航空航天大学机电学院,江苏南京 210016)
为了提高电缆的装配效率,提出一种虚拟环境下电缆几何模型的建模与仿真方法,将电缆模型看作是由一组刚性杆件通过关节串联而成的机器人操作臂,根据末端与始端的相对位姿,利用逆运动学原理反求各杆件的最终形态。最后,利用过控制点的B样条曲线对电缆模型进行光滑处理,逼真地模拟电缆的实际形态。结果表明,该方法可以实现电缆的变形仿真,且计算时间量不大,满足虚拟环境的实时性要求。
电缆仿真;逆运动学;B样条曲线
电缆是传输信息和电能的重要介质,在机电产品中是不可缺少的重要组成部分之一。电缆装配的好坏对机电产品的质量、性能、开发周期和成本具有至关重要的影响。传统电缆布线是通过在物理样机上进行实物试装来完成的,因而经常需要通过多次反复试装来逐步完善,导致难以做到整体优化,布线质量差,可靠性和一致性难以保证[1]。目前,一些CAD软件(如Pro/E、UG、CATIA等)都提供了三维布线模块,但这些软件一般是采用B样条来创建电缆的静态模型,不能实现电缆模型的柔性动态仿真。
随着虚拟现实技术的不断发展,为在虚拟环境下对电缆进行建模与安装仿真提供了新的途径。Hergenrother等[2]提出虚拟电缆这一概念,并采用尺寸相等的圆柱体,通过球形节点连接来对电缆进行建模,节点处利用螺旋弹簧表征电缆的抗弯特性,固定电缆的起止点,以圆柱体重力势能与螺旋弹簧弹性势能之和达到最小来确定电缆最终形态。Look等[3]提出改进的质点-弹簧模型,在两弹簧连接处设置扭簧来模拟电缆的抗弯性能,计算量不大,但存在精度与稳定性问题。Leon等[4]利用有限元模型仿真电缆,该模型精度高,但缺点是计算量大,很难满足虚拟环境的实时性要求。北京理工大学的刘检华等[5]提出虚拟环境下基于离散控制点的电缆建模方法,但该模型只是一组线段的简单串连,精确度和逼真度都不高。中国工程物理研究院魏发远等[6]将电缆看作“蛇形机器人”,利用DH算法反求出各个关节点的最终位置,但由于要假设各关节处的转角相等,所以仿真结果与真实情况有一定的偏差。
目前,虚拟环境下电缆建模和装配仿真技术是虚拟装配中的薄弱环节,在未来一段时间内依然是研究的热点和难点。如何在虚拟现实环境下有效地进行电缆的建模和装配仿真,提高实际电缆装配的质量和效率,已经成为当前迫切需要解决的问题。
1 基于逆运动学原理的电缆建模
逆运动学建模的思想来源于机器人运动学理论,它根据机器人的机械手末端需要达到的位姿,求解机械手各关节变量。可以将电缆表示成包含多个转动关节的空间机械手,电缆关键路径点对应于机器人的关节,关键路径点之间的连接体对应于机器人的运动构件。本文以一种6R简单链式机器人为基础建立模型(如图1所示),采用代数法求解其逆运动学问题,说明逆运动学方法的原理。

图1 以6R 机器人为基础的电缆模型
1.1 机器人参数分析
如图1所示,该模型具有6个转动副,用O0表示基座坐标系,Oi分别表示每个杆件上固定的局部坐标系,6根杆件长度分别为L1,L2,L3,L4,L5和L6,关节变量分别为θ1,θ2,θ3,θ4,θ5,θ6。采用D-H法建立各关节之间的变换矩阵,将坐标系Oi+1在坐标系Oi中的位姿记为,所以表示坐标系O1在基座标系O0中的位姿表示坐标系O2在坐标系O1中的位姿,那么坐标系O2在坐标系O0中的位姿为,以此类推可得到O6坐标系在O0坐标系中的位姿为

1.2 代数法逆运动学求解
该模型的逆运动学求解就是已知末端相对基座的位姿,求解各关节变量θ1,θ2,θ3,θ4,θ5和θ6。
令O0坐标系在世界坐标系中的位姿为A0,插头1在世界坐标系中的位姿为Ac1,插头1在O0坐标系中的位姿为,则有:
令O6坐标系在世界坐标系中的位姿为A6,插头2在世界坐标系中的位姿为Ac2,插头2在O6坐标系中的位姿为,则有:

由表达式(2)、(3)可得:

式中:插头1位姿Ac1和插头2位姿Ac2在虚拟环境中可通过调用函数实时获得;和由模型参数确定,所以在插头运动过程中可实时确定。
可求出其余的关节变量。
1.3 多解的选取准则
当运动学逆解有多个解时,就存在一个解的选择问题。首先,布线标准要求必须检测最低弯曲半径。如果不能满足最低弯曲半径要求,电缆可能会损坏,电缆性能会下降。电缆的最小弯曲半径可查询线缆标准,不同电缆取值不一样。对于每一组解,通过对求得的关节点进行样条曲线拟合,即可得到各关节点处的曲率半径。当某关节点处的曲率半径小于电缆最小弯曲半径,则将这组解排除。
如果在考虑线缆抗弯特性后还存在多解情况,常用的判定准则是选择“最短行程”的解,即选择关节变量中与前一组关节变量值变化最小的一组解。例如在图2中,如果将末端点点A移动到点B,“最短行程”解就是使得所有运动关节的总移动量最小,因此可选择图2中上部虚线所示的位形,这就表明只需在操作臂原有形态基础上给各运动关节赋予一个最小的位移量。这样,利用算法能够选择关节空间内的最短行程解。当杆件长度不等时,可以进行加权处理。下面给出选择最优解的目标函数:
式中:Li(i=1,…,6)为杆件i的长度;θi(i=1,…,6)为关节变量的一组解。选择F最小的一组解,使得选择的解侧重于使机械臂所有连杆位形变动最小。
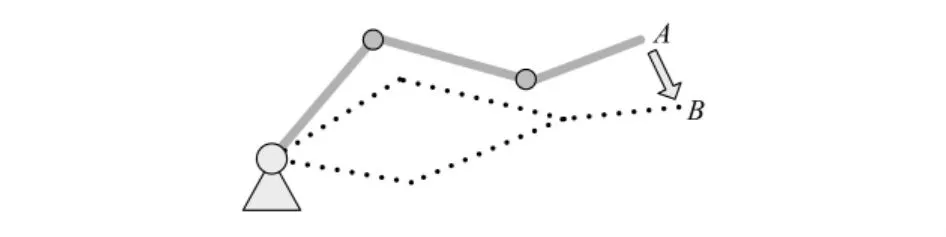
图2 到达B点的两组解
1.4 增加电缆离散的杆件数
逆运动学方法通常只能求解自由度不多于6个的空间机构的关节量,这就限制了组成电缆的杆件数。而组成电缆的杆件数越多,显示效果越好。为此,可采取在已求得各关节变量的基础上对杆件继续细分,将相邻两根杆件离散为三根杆件。如图3(杆件均采用中心线表示)所示,利用杆件a和杆件b可使得端点C处固定坐标系达到图示位姿,而利用杆件1、杆件2和杆件3三根杆件同样也能使得端点C处固定坐标系达到同一位姿,并保持总长度不变。这时,根据节点C处固定坐标系在节点A处固定坐标系中的位姿,利用逆运动学原理求出这三根杆件的位姿。
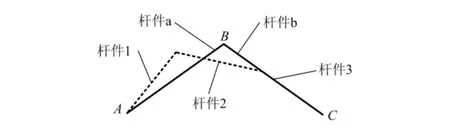
图3 两根杆件细分为三根杆件
图4中,第二个杆件和第三个杆件相对较长,利用上述方法将第二、三根杆件离散为三根杆件,得到了较好的仿真效果,如图5所示。
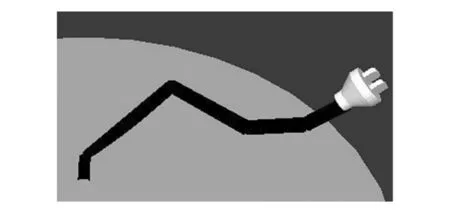
图4 原始模型

图5 进一步离散后的模型
此时仿真出来的线缆还是简单的折线模型,看起来不够光滑,逼真度较差。本文采用过控制点的三次B样条来对模型进行光滑处理,结果如图6所示。

图6 三次B样条光滑后的模型
2 实例
利用MFC与WorldToolkit搭建虚拟仿真平台,电缆接头是在Pro/E中建立,然后通过Pro/E二次开发接口导入到虚拟环境中,而电缆模型在虚拟现实环境中实时创建,通过三维鼠标拾取电缆终端插头来进行电缆的装配仿真。图7是电缆模型在虚拟环境中的一个装配示意图,模拟一种悬垂状态,因为电缆具有一定的抗弯刚度,两插头中间不可能完全呈现悬链线状态,插头附近会有一小段过渡,从图中可以发现该模型与悬链线模型相比,获得了较好的逼真度。
利用WorldToolKit函数包,VisualC++6.0开发的虚拟仿真应用程序包含一个管理仿真循环的仿真引擎,仿真循环每秒可处理5~30帧,可以满足实时性程序开发的要求。对本文提出的建模方法,经程序测试,执行时间为15~16ms,即每秒可处理62.5~66.7帧,符合实时性要求。
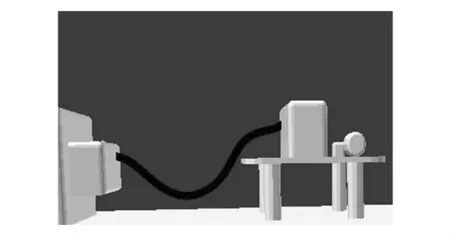
图7 装配示意图
根据以上推导的计算公式编写算法,在虚拟环境下电缆建模与动态仿真的基本流程如图8所示。
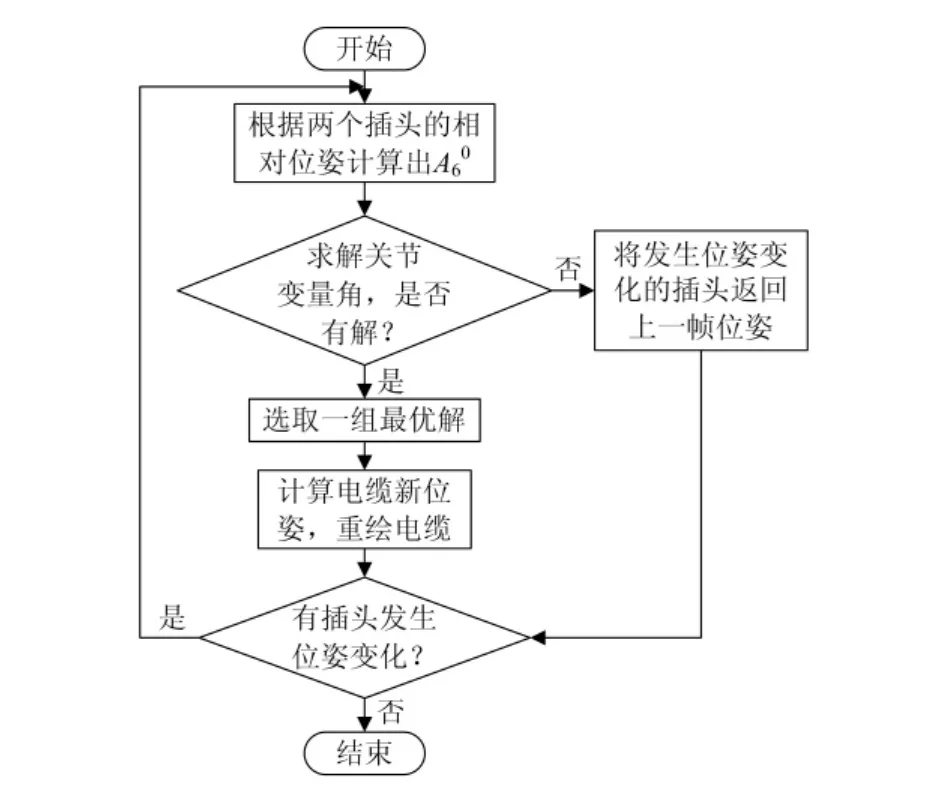
图8 基本流程图
3 结论
虚拟环境下电缆的装配仿真在机电产品开发中占据重要地位,但由于电缆是一种柔性体,在装配过程中几何形状频繁发生变化,因此寻找一种有效的方法实现电缆的动态仿真对我国虚拟装配技术发展具有重要意义。本文提出一种虚拟环境下基于逆运动学的电缆仿真方法,从几何上较好地解决电缆的优化布局与装配规划问题,为进一步发展和完善虚拟环境中电缆的安装仿真技术提供了新思路。
[1]万毕乐.虚拟环境下线缆的布线设计与装配工艺规划技术研究[D].北京:北京理工大学,2007:1-2.
[2]HERGENROTHER E,DAHNE P.Real-time virtual cables based on kinematic simulation[C]//Conference Proceedings of the WSCG,Feb 7-10,2000.Pilzen,Czech Republic:University of West Bohemia,2000:402-409.
[3]LOOK A,SCHOMER E.A virtual environment for interactive assembly simulation:from rigid bodies to deformable cables[C]// In 5th world Multiconferenceon Systemics,Cybernetics and Informatics.2001,Orlando,USA:Virtual Engineering and Emergent Computing,2001:325-332.
[4]LEON J C,GANDIAGA U,DUPONT D.Modeling flexible parts for virtual reality assembly simulation which interact with their environment[C]//ProceedingsInternationalConferenceon Shape Modeling and Applications,May 7-11,2001,Genova,Italy.Genova:IEEE Computer Society,2001:335-344.
[5]刘检华,万毕乐,宁汝新.虚拟环境下基于离散控制点的线缆装配规划技术[J].机械工程学报,2006,42(8):125-130.
[6]魏发远,王玉峰,陈新发.含有柔性线缆的复杂系统装配仿真[J].工程设计学报,2007,14(1):25-30.
The Cable Modeling and Simulation Technology in Virtual Environment Based on Inverse Kinematics
HE Dachuang,YAN Jing,ZUO Dunwen,JU Lu,HONG Wei
(Nanjing University of Aeronautics and Astronautics,Jingsu Nanjing,210016,China)
In order to improve the efficiency of the cable assembly,it proposes a method for the modeling and simulation of cables in virtual environment according to their geometrical characteristics.A cable is modeled by rigid rod connected with joints like a robot manipulator arm.Based on a start and an end position and orientation of the cable,the method calculates the shape of the cable using the principle of inverse kinematics,uses the B-spline curve passing control points to smooth the cable models.This can factually simulate the true shape of cables.The results show that the method is less time-consuming,and can realize the real-time simulation of deformable cables in a virtual environment.
Cable Simulation;Inverse Kinematics;B-spline
TP391.9
A
2095-509X(2013)10-0025-04
10.3969/j.issn.2095-509X.2013.10.007
2013-07-26
中央高校基本科研业务费专项资金资助项目(NN2012082)
何大闯(1989—),男,江苏宿迁人,南京航空航天大学硕士研究生,主要研究方向为制造业信息化。
