高速传料机械手机身的有限元分析
2013-09-12薛锋伟周骥平曹进詹俊勇
薛锋伟,周骥平,曹进,詹俊勇
(1.扬州大学机械工程学院,江苏扬州 225127)
(2.南通江华热动力机械有限公司,江苏南通 226300)
(3.江苏扬力集团有限公司,江苏扬州 225127)
高速传料机械手机身的有限元分析
薛锋伟1,周骥平1,曹进2,詹俊勇3
(1.扬州大学机械工程学院,江苏扬州 225127)
(2.南通江华热动力机械有限公司,江苏南通 226300)
(3.江苏扬力集团有限公司,江苏扬州 225127)
为提高冲压生产线传料机械手的传送精度,对机械手的机身进行了有限元分析。分析了机身的结构特点,运用ANSYS软件对其进行静态和模态分析,得到机身等效应力云图、应变云图以及前六阶固有频率和相应振型。结果表明,机身有较大的优化空间,为下一步机身的优化提供了理论依据。
高速板材搬运机械手;有限元;静态;模态
冲压加工成套联线技术被广泛应用于金属板材成形生产线,开发出高速输送动态特性稳定的机械手是联线技术的关键之一。高速传料机械手的机身不仅要承受传动结构的重力负载,还要承受运动部件在运动过程中产生的动态惯性负载,因此机身是传料机械手重要的承载基体,机身的强度影响其使用寿命,刚度影响机械手的振动、能量损失以及传送精度。为满足生产线的生产节拍、生产可靠性和安全性,需对生产线中传料机械手进行动静态性能分析。主要工作是通过对机身进行静力学特性分析,获取应力应变云图,研究机身变形和应力分布情况,然后再对机身进行模态分析,确定现有结构的固有频率以及振型,为研究机身其他动力响应提供依据。
1 有限元模型的建立
根据企业提供的图纸,在Solidworks软件中创建机械手机身的三维实体模型。因为机身属于大型复杂结构件,结构细节多,形状变化大,所以在建模前需对机身进行一些合理的简化,考虑结构设计形式与受力特点,可以将一些细节忽略:(1)将尺寸较小不作为主要承力部分的开孔和尺寸较小的板块略去。(2)对于明显不会影响机身整体强度、刚度的部位,如某些螺孔、凸台、圆角等略去。而对用于减轻机身质量的一些开孔进行保留,同时机身喉口处的圆角是在横截面突变处,根据弹性力学的分析,必将有应力集中现象,所以机身喉口处的圆角不宜简化,并假设地脚螺栓刚度无限大,不考虑地基及机身以外部件的弹性变形。

图1 机身有限元模型
2 有限元静态分析
2.1 确立边界条件
高速传料机械手主要由机身、料架、横梁、滑台、平衡气缸以及X轴传动系统等组成。机械手的三维装配模型如图2所示。机身的边界条件包括力边界条件和位移边界条件,在静力学分析中,这两者均需要考虑。
实际工作时,两轴传动系统运动部件在高速动态情况下会产生惯性负载,由力的传递作用,通过线轨面传递给机身。X方向惯性力大小Fx=M1× a1=92×11=1 012N,其中M1为X轴运动部件质量,a1为X方向最大加速度。Y方向惯性力大小Fy=M2×a2=324×5=1 620N,其中M2为Y轴运动部件质量,a2为Y方向最大加速度。机身作为机械手的主要承载基体,承受所有运动部件的重力负载,负载通过气缸底座结合面传递给机身,大小为F=mg=324×9.8=3 176N,其中m为运动部件质量,g为重力加速度;最后施加机身的自身重力负载。
由于机身底座通过地脚螺钉与地基固定,所以需对机身底座与地基接触面所有自由度进行全约束,同时将线轨与滑块间看作不受力,具体的边界条件设置如图3所示。
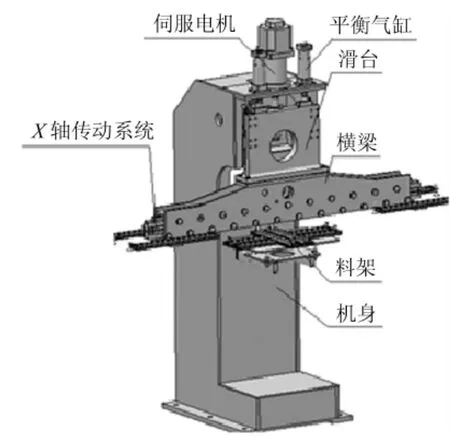
图2 机械手三维装配模型
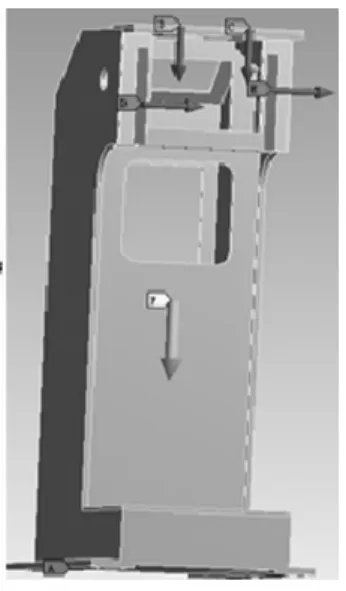
图3 机身边界条件
2.2 设定求解参数
利用有限元分析软件分析的目的是模拟传料机械手在实际工作中,在各种边界条件作用下,机身应力、变形的分布情况,因此软件分析设定的求解参数条件包括机身的等效应力和应变。
2.3 机身静态分析
4)对于海底光缆频繁受损现状,在加强与海事、港监、边防等政府部门单位联络协调的基础上,利用现有的海缆监测平台增强实时监控能力,对禁锚海域展开全天候巡视,一旦发现情况,立即警告驱离,防止船只锚损事件重复发生。及时修复受损海底光缆,对承载有继电保护、图像监控和视频会议等业务的海底光缆提前做好相关的应急预案。
2.3.1 应力分析
等效应力云图如图4所示,应力主要集中在机身左右两侧板喉口的过渡圆角处,在机身前挡板窗口圆角处也出现了局部应力。最大应力出现在机身顶板与前端的连接处,大小约为30MPa。

图4 等效应力云图
2.3.2 应变分析
应变云图如图5所示,最大相对位移出现在机身顶部前端的外伸部分,大小约为0.13mm,左右侧板靠近喉口处的一侧位移也达到0.07mm。
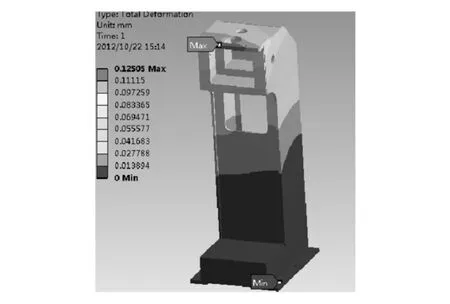
图5 应变云图
2.3.3 机身静强度、刚度分析
对机身进行静态分析,机身采用Q235A钢板焊接而成,机身的强度极限值σmax=235 MPa,查表并考虑取安全系数n=1.5,[σ]=σmax/n= 157 MPa。由机身应力分析可知,机身在气缸安装部位出现局部高应力区,最大应力为30 MPa,小于材料的许用应力值,表明该机身结构具有较好的稳定性,同时喉口也是应力较大处。整个机身除了极少应力集中区域外,其他区域应力值都比较小,因此机身的强度满足要求。由机身应变分析可知,机身加载后,总的相对位移最大为0.13mm,位于机身前部的外伸部分,但该变形值在允许的弹性变形范围内。由此可知,机身的静刚度也满足要求。
3 有限元模态分析
由于机械手在工作过程中惯性力是以动载荷的形式作用于机身,这种状态从静态分析上无法判断,为保证机械手的传料精度和寿命,则还需要考虑机身的动态特性。通过对机身进行模态分析,从而确保机身具有较高的动刚度,以避免共振的产生。考虑到低阶模态更能准确地反映机身自然振动时的变形情况,因此提取前六阶振型。借助于图1在ANSYS中进行模态分析求解,求解后利用ANSYS通用后处理器观察机身固有频率和振型,其求解后的振型图如图6~图11所示。
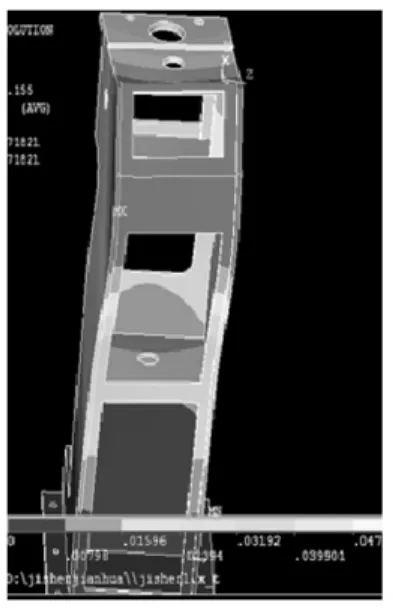
图6 一阶振型图
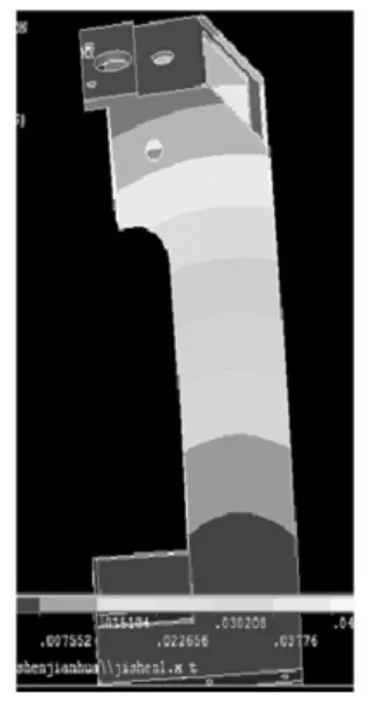
图7 二阶振型图
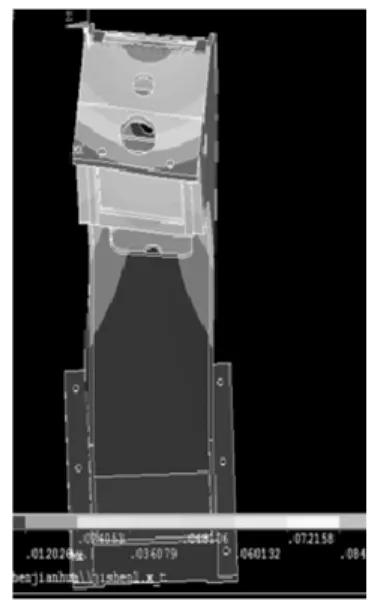
图8 三阶振型图
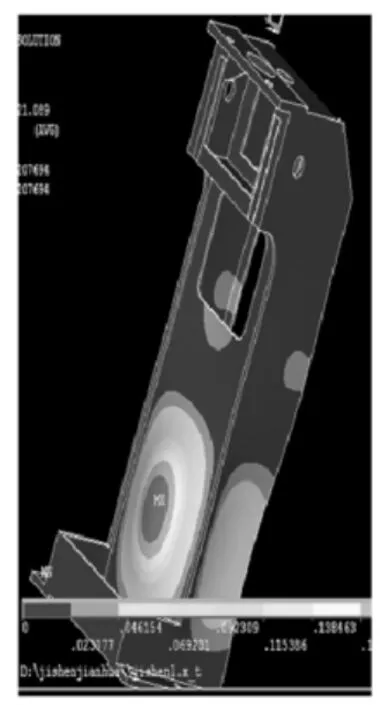
图9 四阶振型图
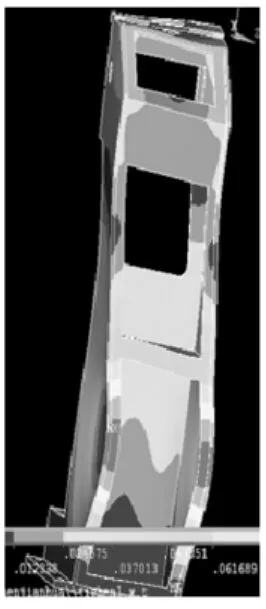
图10 五阶振型图
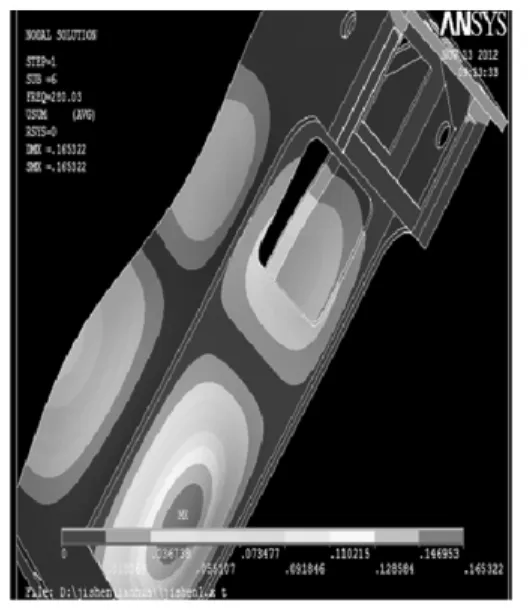
图11 六阶振型图
机身前六阶固有频率见表1。
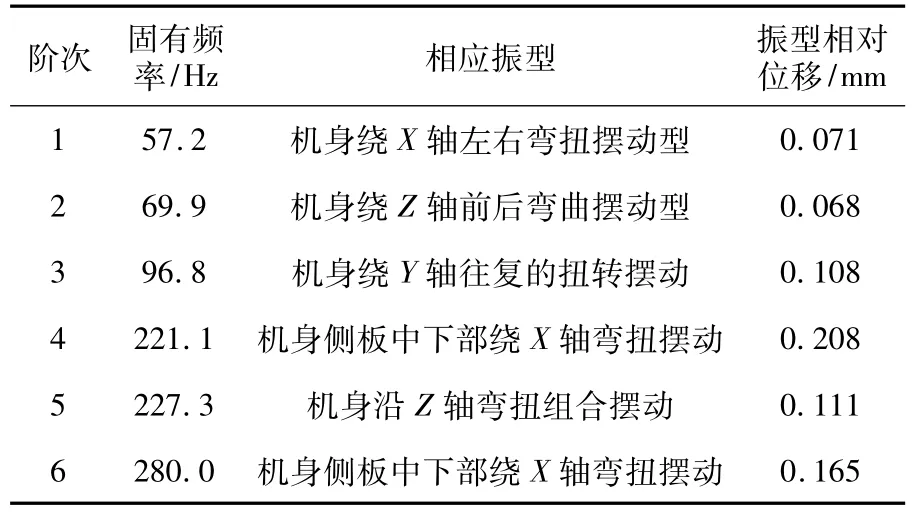
表1 机身前六阶固有频率
由以上对机身的模态分析结果可以看出:
a.一阶振型为机身绕X轴左右弯扭摆动型,振幅由机身中部向顶部逐渐增大,机身底部位移较小,最大相对位移在机身中上部的后端。该振型将影响滑台上下的导向,同时将使地基上的底脚螺栓产生较大的拉应力及弯曲应力,给机身的安全带来隐患。
b.二阶振型为机身绕Z轴前后弯曲摆动型,振幅由机身底部向顶部逐渐增大,机身底部靠近地基的地方相对位移较小,最大相对位移出现在机身顶部的前端。其危害与一阶振型相同。
c.三阶振型为机身绕Y轴往复的扭转摆动。该振型将会增大机身中上部的扭矩,即增大了地脚螺栓的剪力,同时加剧了滑台与线轨导向部分的磨损。
d.四阶振型为机身侧板中下部绕X轴弯扭摆动,该振型属于局部振型。
e.五阶振型为机身沿Z轴弯扭组合摆动,该振型的影响与四阶振型基本相似,增大了左右侧板的弯矩,尤其增大了地脚螺栓的剪力,易使地脚螺栓产生疲劳断裂。
f.六阶振型为机身侧板中下部绕X轴弯扭摆动,该振型的影响与五阶的影响基本相似。
进一步分析还发现:
a.机身不仅有前后、左右方向的振动,而且有扭转振动,这些现象将影响机身的强度和刚度,加重滑台和线轨导向部分的磨损,因此在尝试优化时可以适当增加局部刚度和阻尼来抑制这些振动现象的发生。
b.机身前三阶振型均为整体振型,由此可知,机身整体刚度和质量分布较均衡,无明显薄弱部位和过剩部位,这有利于机身整体性能的提高。
c.机身的最小固有频率为57.2Hz,机械手的工作频率约为4Hz,低阶固有频率远大于工作频率,该机身不会产生共振。
4 结束语
通过对高速传料机械手机身进行有限元分析,分析结果反映出原机身设计在结构方面存在的薄弱环节,对提高传料机械手的传送精度具有指导作用。本文的研究方法可以应用于高速传料机械手的设计阶段,从而避免了样机试制后造成的资源浪费,对企业而言,具有重要的工程实际意义。
[1]范云霄,钱抗抗,鲁绪阁.JM21-200T开式压力机机身的优化设计[J].煤矿机械,2008,29(4):25-27.
[2]谢峰,雷小宝,林巨广.C型压力机机身的有限元分析与优化[J].机械工程师,2007(7):25-27.
[3]龚俊,汤文成,刘世德.基于ANSYS的高速动力卡盘有限元分析[J].中国制造业信息化,2012,41(5):44-48,53.
[4]周昇.开式压力机机身有限元分析与优化[J].南通职业大学学报,2008,22(4):70-72.
[5]詹俊勇,黄建明,张锦义.龙门式压力机机身的有限元分析与优化[J].CMET锻压装备与制造技术,2010(5):49-52.
[6]CRUM J.Analysis of residual stresses in main crankshaft bearings after induction surface hardening and finish grinding[J]. Journal of Automobile Engineering,2003,217(3):173-182.
[7]张桂华.运用有限元理论对JG21-63A开式压力机机身静态特性分析[J].宁夏工程技术,2009,8(4):344-345.
[8]丛明,石立会,宋鸿升.桁架机械手动态特性的有限元分析[J].设计与研究,2008(6):19-22.
[9]隋晓东,黄挺,高峰.压力机机身振动特性的模态分析[J].噪声与振动控制,2010(1):10-14.
[10]Fukuoka T.Analysis of the tightening processs of bolted joint with a tensioner using spring elements[J].Journal of Pressure Vessel Technology,1994,116(1):443-448.
[11]丁旺,丁武学,冯丙波.基于ANSYS的高速压力机模态分析[J].苏州科技大学学报,2011,24(1):78-80.
[12]浦广益.ANSYS Workbench12基础教程与实例详解[M].北京:中国水利水电出版社,2010.
The Finite Element Analysis on the Frame of High Speed Conveying Manipulator
XUE Fengwei1,ZHOU Jiping1,CAO Jin2,ZHAN Junyong3
(1.Yangzhou University,Jiangsu Yangzhou,225127,China)
(2.Nantong Jianghua Thermodynamic Machinery Co.,Ltd.,Jiangsu Nantong,226300,China)
(3.Jiangsu YangLi Group,Jiangsu Yangzhou,225127,China)
In order to improve the combination mechanical properties of conveying manipulator,it takes the manipulator frame of stamping production line as an example,applies the advantage of finite element analysis software ANSYS,establishes the three-dimensional model of static and dynamic.Based on analysis of FEM,it obtains the structural stress,deformation distribution,the natural frequency and vibration mode.The result provides a reliable structural reasonable design with theory proof.
High Speed Manipulator of the Plate Handling;Finite Element;Static;Modal
TH164
A
2095-509X(2013)10-0018-04
10.3969/j.issn.2095-509X.2013.10.005
2013-03-04
薛锋伟(1987—),男,江苏南通人,扬州大学硕士研究生,主要研究方向机电一体化。
