关节型码垛机器人的工作空间分析*
2013-09-12何庆中王志鹏
张 明,何庆中,王志鹏,郭 帅,段 朋
(四川理工学院机械工程学院,四川自贡 643000)
0 引言
近年来,随着物流业的信息化与自动化不断发展,尤其是自动仓库的出现,也对码垛技术提出更高的要求和更广泛的应用。针对物品的不同特点,码垛机器人可在短时间内迅速作出在线调整,以满足码垛作业的需要[1]。
所谓码垛机器人的工作空间,指的是机器人在正常运行时的末端执行器上的参考点所能到达的所有点的集合。码垛机器人的工作空间是衡量机器人工作能力的重要指标。工作空间可以分为两类:一种是可达工作空间;另一种是灵活工作空间。在可达工作空间的边缘,机器人只能以某种位姿才能实现,而灵活工作空间是机器人以任何姿态都能实现[2]。
机器人的工作空间可定义为:在结构限制下末端执行器能够达到的所有位置集合(在三维空间R3中),该集合称为可达工作空间[3],这可以看做是关节空间变量与工作空间的映射,即为:

其中:WR是工作空间;q是广义关节变量;Q是关节空间。
1 码垛机器人的工作节拍
该关节型码垛机器人是为白酒包装自动化生产线上的酒箱上下线以及码垛所研制的。其工作效率是600箱/小时,即工作节拍是6秒/箱。本码垛机器人按照图1所示的生产线布置方式进行布置。

图1 码垛机器人生产线布置方式
2 运动学方程的建立
该码垛机器人采用平行四边形机构,有四个自由度,且均为旋转关节。结构图如图2所示。此结构的特点是:稳定性好、承载能力大、结构紧凑。
根据码垛机器人的总体结构方案绘制出该机器人的臂部结构简图如图3所示。J1轴为码垛机器人底座的旋转轴,转动范围是330°。J2轴为机器人后臂与底座的减速器旋转轴,转动范围是100°。J3轴为机器人前后臂之间连接的减速器旋转轴,转动范围是130°。J4轴为机器人末端执行器的转动轴。转动范围是330°。底座的旋转是J1轴绕着z轴转动,旋转中心为O0点;后大臂的转动是J2围绕O1的旋转;前臂的转动是J3轴绕着O2轴旋转;由于采用的是平行四边形结构,所以O3轴的转动是从动的,手腕部的转动就是J4轴绕着z轴转动,旋转中心为O4点。在图3 中,O0、O1、O2、O3、O4分别为旋转中心以及各个连杆的坐标系原点,机构的主要参数为:l1=150mm,l2=500mm,l3=360mm,l4=84.9mm,d1=195mm。

图2 码垛机器人总体结构方案

图3 码垛机器人臂部结构简图
利用D-H法可以建立关节的坐标系统,规定θi为连杆转角,即关节变量;di为两个连杆之间的距离;αi-1为连杆的扭转角;ai-1为连杆i- 1 的长度。由于关节4(O4)为从动关节,所以可以得到它与关节 2、3(O2、O3)的关系为:

再由于码垛机器人的末端执行器只有平动,没有自身的转动,因此关节1和关节5满足关系为:

根据图3的运动简图可得到码垛机器人的D-H参数,表中,θ1、θ2、θ3、θ4为各个连杆的关节变量;l1、l2、l3、l4、l5为连杆常量;关节的转角范围是码垛机器人在工作时的工作要求范围,即机器人抓取酒箱以及放下酒箱时关节应该转动的角度范围。如表1所示。

表1 码垛机器人的D-H参数表
由于码垛机器人的四个关节均为旋转关节,所以应用广义连杆变换齐次矩阵的一般表达式:




式(6)~式(9)就是该码垛机器人的运动学方程,其含义就是末端执行器的坐标系相对于底座坐标系的位姿。其中ci、si分别表示 cosθi、sinθi,i=1、2、3、4、5,cijk、sijk分别表示 cos(θi+θj+ θk)、sin(θi+θj+ θk),i、j、k分别为 2、、3、4。当关节变量已知的情况下,就能得出码垛机器人末端执行器的位姿。这是进行码垛机器人运动学分析的基础。
再根据式(2)和式(3)的关系式,可以得到末端执行器的齐次变换矩阵即码垛机器人位姿正解为:
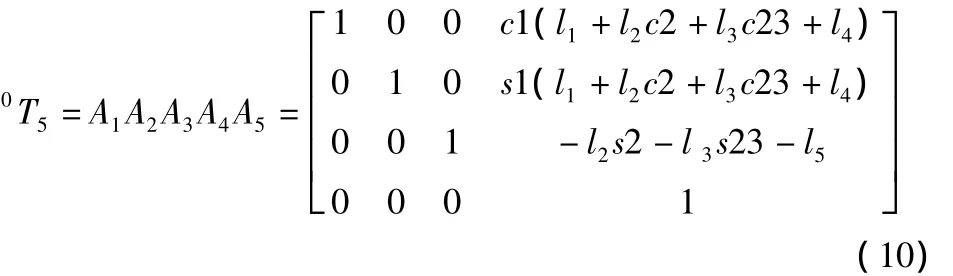
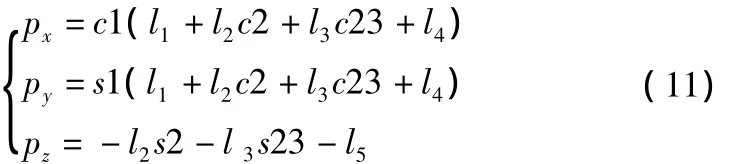
码垛机器人手腕处的位移相对于底座坐标系的坐标为:
对于该码垛机器人而言,关节的数目和末端连杆的自由度数目都可认为是三个,其中关节5与关节1可看成是相关联的,所以该机器人的雅可比矩阵是3 阶的方阵[4]。
3 码垛机器人工作空间分析
对于机器人的工作空间的算法中,常用解析法、图解法和数值解法三种。解析法是通过多次求解包络线来把工作空间的边界用方程表示出来,这种方法的直观性不强而且十分的繁琐。图解法是得到工作空间的截面或剖面线。数值法的实质就是尽可能多的选取独立的关节变量,在用正向运动学方程算出机器人末端执行器的坐标集合。坐标越多,工作空间就越真实。
在综合设计工作空间时,一般都要以一个最小的正方体来进行,这个正方体包含了机器人的所有的工作点,这样就可以确定机器人关节活动的范围。对于一个机器人来说,与工作空间的体积相关的体积指数和与末端执行器灵活性相关的灵活性指标是评价机器人工作空间的指标。机器人的灵活性其实就是机器人完成任务的能力,在设计机器人时,最先考虑的就应该是机器人的灵活性。因此,设计一个典型的工作空间,让机器人在这个空间内工作,由此来评价机器人的性能是简单而可行的[5]。
码垛机器人的运动学方程是由D-H法求得的,根据运动学方程,借助MATLAB软件来实现工作空间的仿真设计,这样可更直观的表达机器人的工作空间。运用MATLAB来进行码垛机器人的工作空间域的仿真是尽可能多地获得关节变量的组合,通过MATLAB编程来求解运动学方程,然后将求得的位置点以图形的方式显示出来[6]。
对于MATLAB的算法,应该在码垛机器人的各个关节变量能够转动的范围内,从第一个关节开始,依次以各自的转动关节进行转动(或移动关节进行移动),直至最后一个关节。在变化的过程当中,应当让最后的关节优先。可以先规定一个步长的关节转动,再让其下一个关节在自身的变化范围内从最小步长到最大步长变化,得到的是多个关节的变量的组合,再将这些变量导入至末端执行器的位姿方程中,就可以求的末端执行器的位姿的集合,这个集合就构成了工作空间。
根据式(11)以及各个轴的转动范围,利用数值算法,在MATLAB中进行计算,绘制出机器人的工作范围,可以直观的表达出来。循环程序如下:

码垛机器人的可达工作空间的三维图如图4所示。
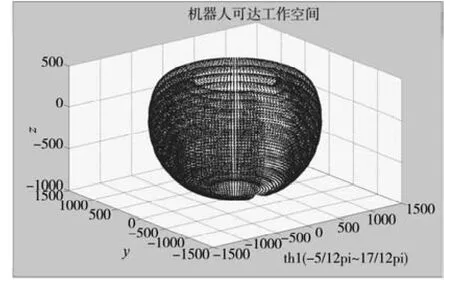
图4 码垛机器人可达工作空间三维图
再根据可达工作空间的三维图,可以得到工作空间在xoy平面上的投影,如图5所示。当任取一个θ1的值时,就能得到工作空间的xoz平面的截图,如图6所示,同理,当任取一个θ2的值时,就能得到yoz平面的截图,如图7所示。

图5 xy坐标平面投影图

图6 xz坐标平面投影图
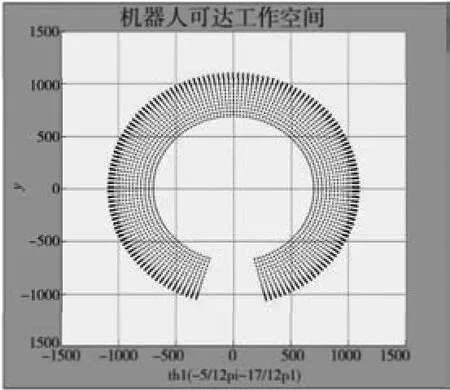
图7 yz坐标平面投影图
由图4可以看出,码垛机器人的工作可达空间是一个近似的椭球体构成,由于机器人工作范围的限制,此椭球体有一个扇形的缺口,并且有一个空心区域。
对可达空间进行验证,可任意给定一个关节角度,令 θ1=45°,θ2=60°,θ3=30°,代入到式(11)中,可得到px=342.8243,py=342.8243,pz= -868,此坐标在可达工作的工作空间内,可以再取不同的θi的值,边界曲线都在切面内很好地包络了这个二维的“云图”,从而验证了方法的正确性。
4 结论
本文通过D-H法确定了关节码垛机器人的运动学方程,再用关节转角来确定步距角的转动,得到了关节变量的集合,再根据这个集合下所有末端执行器的点的向量,分析出码垛机器人的可达的工作空间并对其进行验证。从仿真的结果来看,该机器人的工作空间紧凑,同时也验证了用此法来求解机器人工作空间的确有很好的效果,也可为机器人的进一步优化以及控制系统的设计提供依据。
[1]朱世强,王宣银.机器人技术及其应用[M].杭州:浙江大学出版社,2000.
[2]赵献丹,何庆中,刘明,等.基于MATLAB的微电驱串联机械手工作空间域解算与仿真[J].四川理工学院学报,2006,19(5):5 -8.
[3]曹毅,李秀娟,宁祎,等.三维机器人工作空间及几何误差分析[J].机械科学与技术,2006,25(12):1458.
[4]毛立民,邹剑.关节型码垛机械手运动学分析及仿真[J].组合机床与自动化加工技术,2010(9):44-47.
[5]李晓刚,刘晋浩.码垛机器人的研究与应用现状、问题及对策[J].包装工程,2011,32(3):96-102.
[6]钟勇,朱建新.一种新的机器人工作空间求解方法[J].机床与液压,2004(4):66-67.
