CAN双通道冗余步进电机控制系统设计*
2013-09-12张建华刘汉忠
方 力,张建华,刘汉忠
(南京工程学院自动化学院,南京 211167)
0 引言
步进电机具有结构简单、误差不累积、易于控制、可靠性较高等特点,被广泛应用于工业控制中[1]。在舞台灯光控制系统中,一个电脑灯里往往有几个甚至几十个步进电机,所有步进电机的控制就靠一个MCU控制,在电脑灯狭小的空间里除了有大功率的灯管灯头外,还有步进电机、各种机械设备、电子元件、控制芯片等等,电脑灯长时间运行后内部温度会很高,影响系统的可靠运行,因此可靠性是电脑灯产品质量好坏的一个重要因素。一般电脑灯控制系统中都带有电子闭灯功能来防止由灯内温度过高而损坏芯片,如果主控MCU损坏系统则瘫痪,针对这种情况在设计中增加了一种基于CAN的冗余技术来进一步提高系统的可靠性,从而提高产品的质量和竞争力。CAN总线是控制器局域网[2],是一种支持分布式实时控制系统的串行通信局域网,其信号传输采用短帧结构,因而传输时间短,受干扰的概率低,具有实时性强、性能好、可靠性高等优点[3],被广泛应用于工业数据通信中。本文以双PIC单片机为核心实现基于CAN总线的双通道冗余多步进电机控制系统。
1 系统设计
1.1 冗余系统总体设计
基于CAN总线的双通道冗余步进电机控制系统的总体设计框图如图1所示,它主要由双芯片控制单元,CAN通信单元,逻辑控制单元,驱动保护单元及其输出单元等组成。系统包含两个PIC微控制器,互为热备份,两个PIC芯片通过CAN总线进行各种信息交换。两个芯片分别通过逻辑控制单元与各自通道相连,这两个通道与外部驱动控制总线是相连的,共享一个外部接口,通道逻辑控制单元使同一时刻只有一个通道打开输出控制参数控制步进电机,保证系统工作的稳定性。每个PIC芯片实时存储系统的各种信息,并通过CAN总线在双机间进行交换。
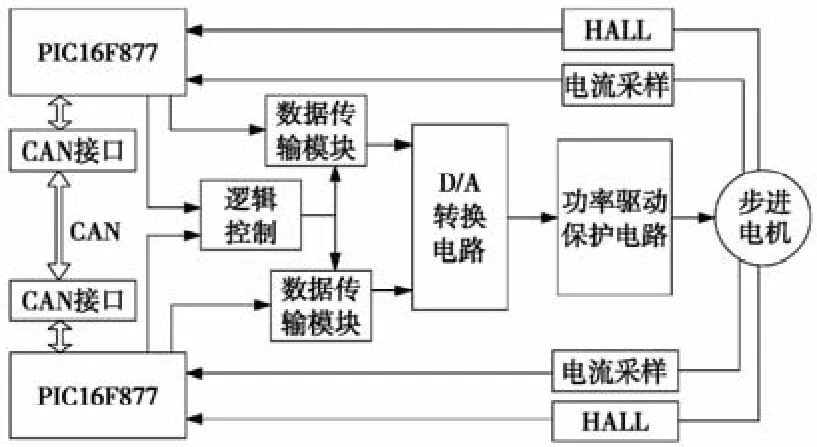
图1 总体设计结构框图
1.2 多步进电机控制系统设计
多步进电机控制系统以具有高性价比的单片机PIC16F877[4]为主控单元,以 ST公司 L6219专用功率驱动保护芯片为驱动单元,配合TI公司7226 AD转换芯片实现步进电机两相绕组电流控制,控制信号通过74HC377锁存器输出控制多路步进电机,接口电路如图2所示。
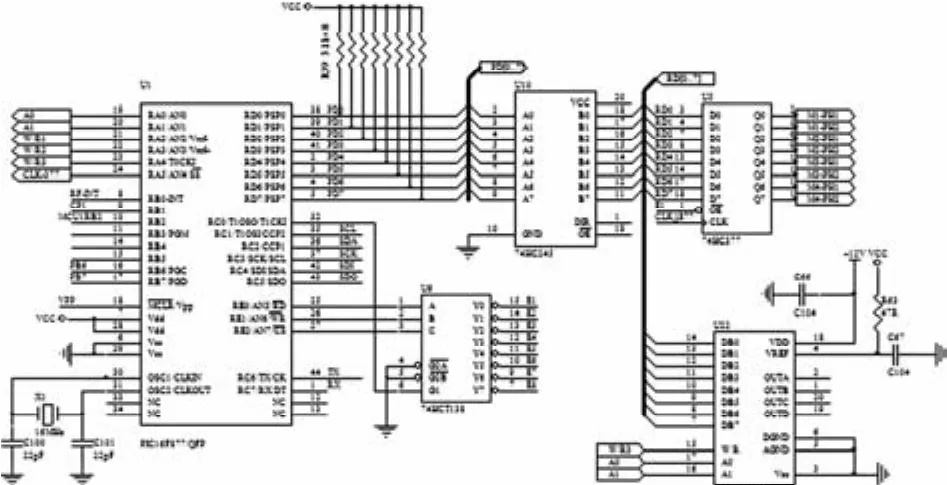
图2 单片机接口电路
驱动保护电路采用专用集成芯片L6219,L6219内部电路实现PWM恒流斩波控制[5],具有良好的稳定性能,L6219与7226 AD转换芯片配合对步进电机相绕组电流方向、大小的控制,使得步进电机两相绕组上得到相位相差90度的两个近似正弦电流波形,从而实现多路步进电机恒流斩波细分控制。单片机接收电流反馈信号对步进电机进行斩波控制,反馈电流通过采样电阻采样,采样电阻同时还起电流保护的作用,防止绕组线圈电流过大而损坏电机。驱动保护接口电路如图3所示。
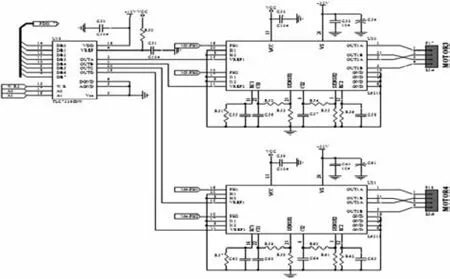
图3 功率驱动保护接口电路
1.3 CAN总线通信接口设计
双PIC芯片之间通过CAN总线通信,CAN总线通信控制器采用PHILIPS公司的SJA1000,以实现CAN协议所规定物理层和数据链路层所有功能,具有完成高性能通信协议所要求的全部特性[6]。采用PCA82C250作为CAN总线收发驱动芯片,实现CAN总线协议差分发送和差分接受[7]。PCA82C250采用斜率控制方式,串接15~200kΩ电阻后接地,控制上升和下降斜率,从而减少射频干扰。双绞线作为传输介质分别接至CANH、CANL引脚,总线网络终端处接120Ω的匹配电阻以吸收反射信号[8]。考虑到现场有各种各样的干扰,在SJA1000与PCA82C250之间增加6N137高速光耦隔离器件[9]。接口电路如图4所示。
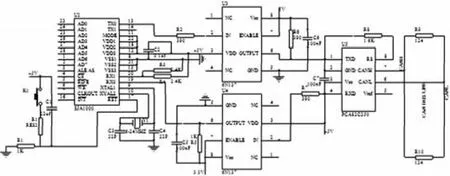
图4 CAN总线接口电路
1.4 通道切换电路
切换器电路实现主要由4部分组成:D触发器、RC电路、与门和74HC245芯片。电路如图5所示。
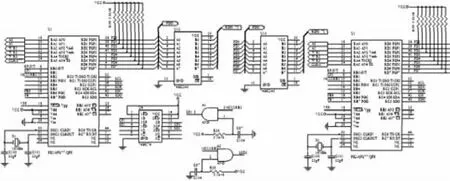
图5 通道切换接口电路
图中RC为延时电路,74HC74为双D触发器,当系统上电后RC电路充电在开始阶段,RC电路输出端为低电平,使与门输出低电平,D触发器置位缓冲器74HC245使能端,控制74HC245切断单片机与数据通道的联系,从而在硬件上保证刚上电单片机处于断开通道的从机状态。随着RC充电时间延长,RC电路输出端电压逐渐升高,最终使输出端逻辑电平由低变为高,与门受控与对方单片机输出信号,从而使D触发器受控于对方单片机,使主从切换能够实现。当从机判断到主机故障,需要主从切换时,要确保对方单片机在被切除后要与通道断开,因此,从机在切换到主机之前,先向RB2引脚上送一低电平,使与对方单片机连接的D触发器置位,关闭其三态缓冲器74HC245,切断其与通道的联系,然后再向RB1引脚发送一个脉冲信号,使自己连接的D触发器翻转,输出低电平,打开74HC245取得对通道的控制权,由从机切换到主机。
1.5 冗余算法设计
单片机上电初始化时,并不明确自身为主机或从机,在上电初始化完成以后,各个单片机会在CAN总线上广播固定特征的询问帧,目的是判断当前是否有主机在运行,若应答超时,则认为当前无主机在运行,自行置为主机,打开74HC245取得对通道的控制权。若当前已有主机正在运行,则主机收到询问帧后发送应答帧进行应答,同时也获知CAN总线上有其他单片机在运行。单片机上电初始化时后上电的单片机自行设置为从机,若2机同时上电,2机可能会同时发送询问帧,由CAN总线仲裁协议仲裁,使其中某个单片机获得CAN总线使用权,成功送成询问帧。为避免两个单片机同时竟争主机,没有取得CAN总线使用权的一方在收到对方的询问帧后不立即重发询问帧,而是采取指数退避方法,延时一段时间,使对方应答超时从而自行设置为主机后,再向已变为主机的对方重发询问帧,让主机获知从机存在,以及时登记备份数据。主程序流程图如图6所示。
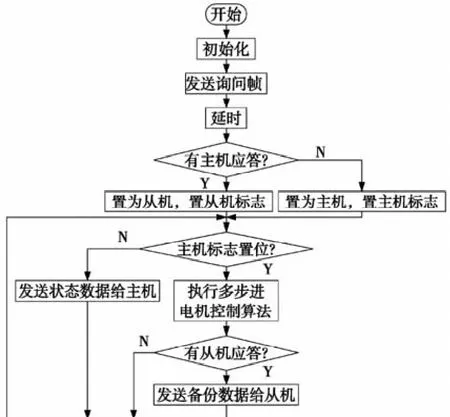
图6 主程序流程图
初始化和主从设置完成之后,主机和从机之间就需要不断交换状态数据,使从机备份主机设置参数、同步存储被控对象的工作状态以及实时参数。主机将自己的参数、被控对象当前参数以及其他需备份数据定时向从机发送。若从机在设定的时间间隔内未收到主机的数据或者收到主机报告出错的信息,则认为主机出现故障,立即自行置为主机,取得通道的控制和使用权,并根据最后备份主机的所有数据对被控对象继续实施控制,并启动故障指示灯闪烁信号对故障节点报警。从机也要在规定的时间间隔内向主机报告自身的状态,主机在规定的时间间隔内未收到从机发送的状态数据,则认为从机故障,启动故障指示灯闪烁信号对故障节点报警。通道控制权切换算法如图7所示。

图7 通道切换算法流程图
2 试验分析
实验系统设计了双MCU的双通道冗余步进电机控制,双MCU之间通过CAN总线通信,完成数据交换,系统实物如图8所示,主要包括核心控制单元、功率驱动和保护单元、键盘显示接口单元及电源几个部分。双MCU采用PIC16F877单片机,采用2片7226和4片专用集成功率驱动芯片L6219驱动4路步进电机,步进电机采用两相混合式步进电机,额定电流为1A,固有步进角1.8度。系统采用恒流斩波细分控制技术和电流反馈对步进电机进行微步细分控制。绕组电流反馈通过采样电阻实现电流采样,同时起电流保护作用。
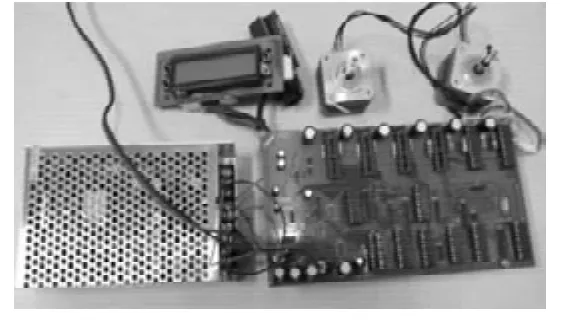
图8 控制系统实物图
实验无需测量转速曲线,细分控制效果取决于两相绕组上的电流波形,只需测量采样电阻上的相电流波形,图9为电机在空载时,系统在双通道切换时两相绕组电流变化曲线,为两个正弦波且相位相差90度的波形图。从电机绕组实验电流波形来看,符合使得步进电机运行平滑、合成磁场均匀需要的相位相差90度正弦波形,能够使步进电机运行时得到均匀细分旋转步距。双通道切换过程中两相绕组电流变化波形正常,电机运行平稳。
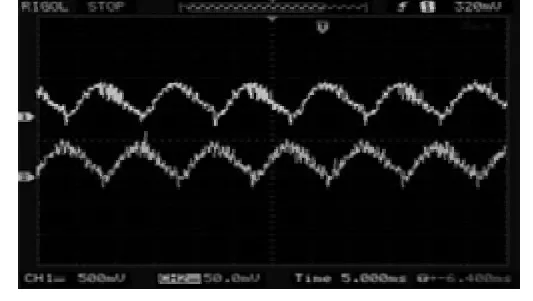
图9 通道切换两相绕组电流波形
由于步进电机的控制是采用细分控制方式,一个单片机要控制多个步进电机,采用分时控制算法,按细分电流表先输出第一个步进电机的一个细分歩距角细分电流,接下来输出下一个步进电机的一个细分电流,由于单片机的工作方式是一个大循环,在无中断情况下,大循环中所有任务安顺序执行下来,一个步进电机的细分电流的输出到下一个步进电机细分电流的输出之间的延时时间包括所有任务的执行延时时间和延时函数执行时间,与无通道切换任务时相比,有通道切换任务时会增加很短延时时间,可以通过有无通道切换标志位来判断,是否在执行的任务中增加了通道切换的任务,如果有则减少延时函数中循环执行NOP语句的时间,以补偿通道切换引起的延迟,因此尽管有通道切换过程,但对于多步进电机的细分控制方式来说,步进电机的运行不受影响。但由于增加了双机通信备份任务,输出到每一个步进电机的相邻两个细分电流之间最小延时时间增加,因而控制中对步进电机的最高转速会有所影响。
3 结束语
本研究设计的双通道冗余方法已经在舞台灯光控制系统的电脑灯中得到应用。该设计硬件与算法易于实现,当系统主控芯片出现问题时可通过运行过程中主控芯片相互通信的数据及状态自行完成通道切换,从而保证系统保持可靠运行,系统经过一批有冗余系统的电脑灯和无冗余系统的电脑灯长期运行比较来看,基于CAN双通道冗余多步进电机机控制系统运行的可靠性有较大的提高。
[1]康惠林.一种实用两相混合式步进电机细分驱动电路[J].电气传动,2011,41(5):60 -63,66.
[2]邬宽明.CAN总线原理和应用系统设计[M].北京:北京航空航天大学出版社,1996.
[3]李亚,杨亮,任鹏,等.步进电机短位移高响应加减速控制方法研究[J].组合机床与自动化加工技术,2010(8):30-32.
[4]王有绪.PIC系列单片机接口技术及应用系统设计[M].北京:北京航空航天大学出版社,2000.
[5]方力,李宏胜.步进电机高精度细分控制系统设计[J].微电机,2011,44(8):102 -105,112.
[6]丁学文,张琦.CAN总线在变频调速系统中的应用[J].电气传动,2002(6):41 -42,46.
[7]Philps Semiconductors.PCA82C250CAN Transceiver for 24V Systems[DB/OL].2000.
[8]黄崇莉.基于CAN总线的步进电动机控制器设计[J].微特电机,2008(11):44-45.
[9]何宇,吴瑞明,陈继芳,等.基于CAN总线的多轴运动控制系统研究[J].组合机床与自动化加工技术,2004(2):47-48.
[10]韩雪晶,郭嘉.双冗余CAN网络励磁功率单元的研制[J].电气传动,2012,42(3):44-47.
