基于IEEE1149.4标准的参数测试系统的设计
2013-08-22何淑珍
凌 云 何淑珍
(湖南工学院,湖南 衡阳 421002)
随着集成电路的高速发展,联合行动测试组(JTAG)提出了边界扫描测试技术,形成了IEEE1149.1边界扫描测试标准[1]以及IEEE1149.4混合信号电路边界扫描测试总线标准[2],为电路测试提供了很好的解决方案。
目前许多基于IEEE1149.4标准的电路测试系统设计均采用单片机作为主控制器[3-4]。考虑到FPGA较强的灵活性与可扩展性,本文使用FPGA作为电路参数测试的主控制器,设计一个电路参数测试系统。实验表明,该系统设计合理,能对被测板进行参数测试。
1 IEEE 1149.4标准简介
IEEE1149.4标准是对IEEE1149.1标准的扩充,保持了IEEE1149.1标准中的测试存取口(TAP)以及数字边界模块(DBM),增添了对模拟电路参数测试的模拟测试存取口(ATAP:由AT1与AT2两根线构成)、测试总线接口电路(TBIC)、模拟边界模块(ABM)以及两根内部模拟测试总线(AB1、AB2)[5]。
AT1与AT2构成了模拟虚拟探针,测试激励由AT1进入,由AB1发送到核心电路或通过一个引脚到达外部电路,测试响应经由AB2传送至AT2输出。
2 参数测试方法
系统通过边界扫描测试总线(TMS、TCK、TDI、TDO)对被测电路施加测试向量,控制被测板中符合IEEE1149.4标准的芯片的测试总线接口电路(TBIC)和模拟边界模块(ABM)的开关矩阵,完成混合电路边界扫描测试链路的配置,形成的虚拟探针通路。通过向虚拟探针AT1施加直流或交流激励、AT2读回测试响应,便可计算出电阻的阻值或电容的容值。参数测试方法如图1所示。
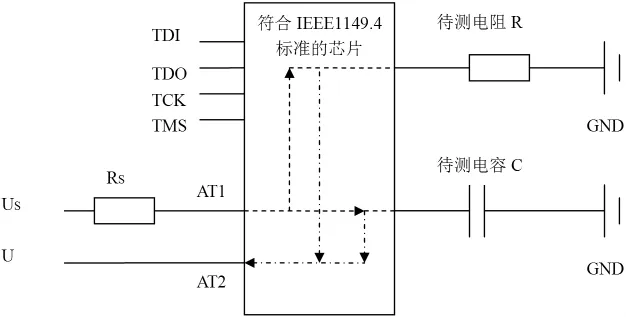
图1 参数测试方法Fig.1 The method of parametric test
其中,US为模拟电压激励值,U为响应电压值,f为正弦激励的频率,RS为已知的电阻,则待测电阻、电容的计算公式为:

3 测试系统设计
系统主要由边界扫描控制器、USB通信模块、激励产生模块和信号调理模块和AD采样模块构成,其结构如图1所示。

图2 系统硬件结构图Fig.2 Structure diagram of the hardware system
4 系统测试验证
以电容测试为例,测试一个容值为1μF的电容,RS阻值为1kΩ,交流激励频率为1kHz,采集10次响应数据进行平均,得出被测电容容值为1.028μF,测试误差为2.8%。实验结果表明系统能够完成参数测试,并且测试误差较小。
5 结论
本文基于IEEE1149.4标准设计了一个用FPGA进行控制的参数测试系统,并对其功能进行了验证,实验结果表明该系统测试方法简单,测试过程迅速,测试结果准确。该系统为混合电路测试提供了一个很好的解决方案,具有重要的应用价值。
[1]IEEE Std 1149.1—1990:IEEE Standard Test Access Port and Boundary-Scan Architecture[S].IEEE Computer Society,1990.
[2]IEEE Std 1149.4—2010:IEEE Standard for a Mixed Signal Test Bus[S].IEEE Computer Society,2010.
[3]Li Yan-ping,Le Jia.Design of Analog Test Hardware Platform Based on IEEE1149.4,The Ninth International Conference on Electronic Measurement&Instrument,2009.
[4]张西多,易晓山,胡政.基于IEEE1149.4的混合信号边界扫描测试控制器设计[J].自动化测试,2006,14(5).
[5]陈圣俭,张胜满,周燕,陈健.基于IEEE 1149.4标准的混合电路测试系统设计[J].计算机测量与控制,2009.17(9):1673-1675.
[6]钱峰.EZ-USB FX2单片机原理、编程及应用[M].北京:北京航空航天大学出版社,2006.