基于最小类内方差的蛇形机器人多阈值分割*
2013-08-19魏武姜莉王新梅
魏武 姜莉 王新梅
(1.华南理工大学 自动化科学与工程学院,广东 广州 510640;2.中国地质大学 机械与电子信息学院,湖北 武汉 430074)
视频图像序列中机器人分割方法,即基于特定分割算法实现机器人采集图像中具有特殊意义的不同区域按一致性条件分开的方法[1-2],其实质是图像分割,是图像处理理论的重要内容.蛇形机器人是一种能模仿生物蛇“无肢运动”、多关节、多冗余度的新型机器人,具有稳定性好、横截面积小、步态多变和柔性高等特点,在复杂地形也能灵活运动[3-5].实现蛇形机器人步态的有效分割,是进行步态定位等后续工作的关键,将为实现蛇体自动无损检测桥梁缆索表面缺陷提供技术支持.
一般的机器人分割算法主要是针对图像中目标和背景的单阈值分割[6-7],即利用图像中目标与背景的灰度值差异,取某一灰度值作为阈值(门限值),把图像中每个像素的灰度值和阈值进行比较,从而以阈值为界把目标与背景分割开来. 这种分割方法只适于单个目标与背景的简单分割,不能分割出目标的细节.对于更复杂的图像分割,Frucci 基于Beucher 和Mohamadian 的分水岭检测轮廓法[8-9],提出一种多阈值分割方法[10],即利用灰度分布性把灰度图像分割成多个区域. 但是该分割方法只在图像中目标相邻两区域间有明显差异时有效;陶立超等[11]受Hog 特征启发,提出一种分块重叠的颜色直方图多阈值分割算法,该方法虽然优于传统的颜色直方图分割法,但是需要实时更新某一颜色变化较大块的直方图,并计算与参考模型间的巴氏距离,计算量大,分割效率及对光线的鲁棒性难以保证;吴涛等[12]提出图像的二维阈值分割方法,借助图像的空间信息,建立图像的二维直方图,引入数据场的思想,但是该方法忽略了目标的纹理、颜色等信息. 针对以上问题,文中根据色调-饱和度-亮度(HSV)颜色空间对颜色变化的不敏感特性,设置图像的感兴趣区域(ROI)减少计算量,利用改进的Otsu 最小类内方差法寻找各个局部区域的最优阈值,从而实现高效、准确的机器人多阈值分割.
1 RGB 到HSV 颜色空间的转化
为研究蛇形机器人的步态定位,需准确提取蛇体特征,文中将蛇形机器人的15 个关节依次平均分成5 组,用5 种不同的颜色标记各组关节,为方便表示,把个关节组分别命名为区域1 -5(如图1 所示),并采集蛇体运动过程中的视频序列图像.

图1 蛇形机器人关节组的命名Fig.1 Name of snake-like robot’s joint group
颜色分布特征一般来说对运动目标变形、旋转、尺度变化具有一定的鲁棒性和持续性.RGB 颜色空间具有无需换算、简便易用的优点,但是对光照、物体反射特性敏感.文中采用对光照不敏感的HSV 空间.HSV 表示3 个互相独立的分量和值(色相H、饱和度S 和值V),克服了通用RGB 颜色模型中两者耦合、对光照亮度变化比较敏感的缺陷. HSV 本质上与RGB 模式没有区别,只是产生颜色的方式不同.文中算法首先将图像由RGB 颜色空间转化到HSV 颜色空间,如图2 所示,选取原图像的H 分量图进行后续处理.应对智能识别领域经常遇到的多目标识别的情况.因此,文中针对Otsu 单阈值分割算法进行改进,提出多阈值分割算法.
2.2 空间滤波增强
蛇形机器人在运动过程中拍摄的视频图像,由于成像系统、传输介质等的不完善,受到多种噪声的污染,极大降低了图像质量,影响图像特征分割的效果.为保证分割的精确度,文中借助二维中值滤波法抑制图像背景噪声(包括阴影、光斑、简单背景)、平滑直方图.二维中值滤波分别对图像的行列进行中值滤波,且两者彼此独立,滤波效果要优于一维的中值滤波,在消除噪声的同时还能保持图像中的细节部分,防止边缘模糊;其用滤波掩模确定的邻域内像素的平均灰度值去代替图像每个像素点的值,这种处理减小了图像灰度的“尖锐”变化(背景噪声).为尽量减少背景干扰,同时考虑保留细节信息,文中选择5 ×5 的平滑滤波模板对H 直方图滤波(见图3),并在此基础上进行后续工作. 另外,HSV 空间对光照、颜色变化的不敏感性和二维滤波的去噪作用,可极大减小图像中关节阴影、少量光斑及简单背景对图像整体效果的影响.

图2 蛇形机器人的蠕动爬行步态Fig.2 Peristalsis crawl gait of snake-like robot
2 改进的多阈值分割算法
2.1 阈值分割一般原理
阈值分割的基本思想是利用图像中目标与背景之间的灰度值差异,取一个或几个灰度值作为阈值,把图像中每个像素的灰度值和阈值进行比较,以阈值为界对图像分类,从而把目标与背景分割开来.设(x,y)是图像中任意像素点,f(x,y)为输入图像在该点的灰度值,g(x,y)为输出图像在该点的灰度值,阈值为T,则有
阈值分割的基本流程是先确定阈值,然后根据阈值把图像分割归类. 图像分割中,确定阈值是关键,阈值决定了最终二值化的效果.已经出现的阈值选择方法多达十几种[13],最具代表性的有最大熵法、Otsu 法等.这些方法大多是单阈值法,不能有效
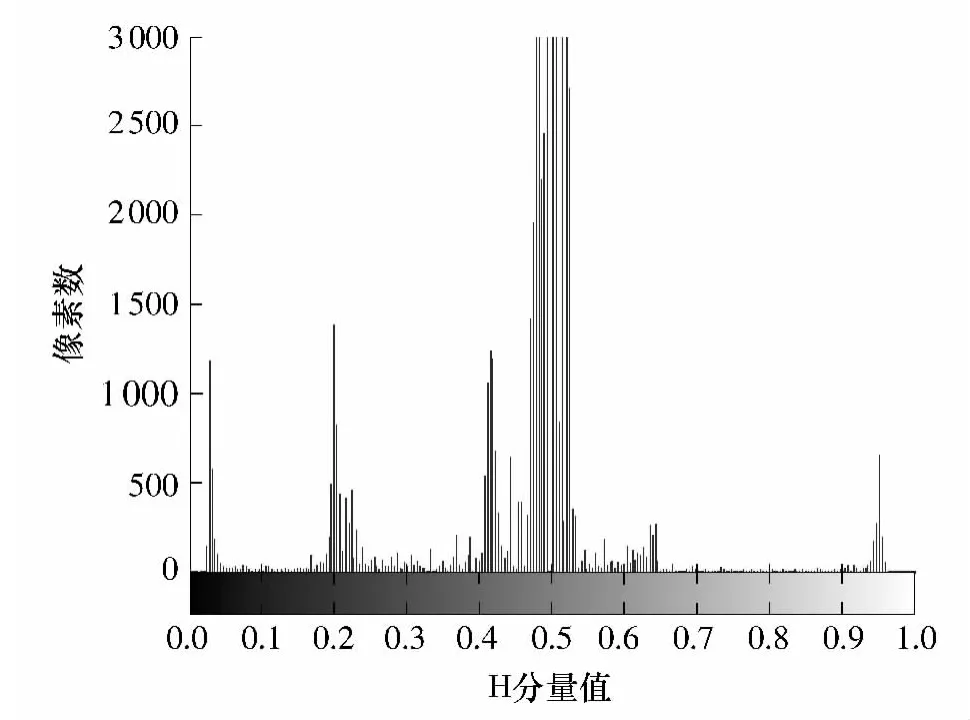
图3 经滤波后的H 分量直方图Fig.3 Filtered H histogram
2.3 最小类内方差分割算法分析
Otsu 法[14]也称为最大类间方差法或最小类内方差法,是由日本学者大津展之(Otsu)在最小二乘法基础上提出的.该方法基于图像的直方图,以目标和背景的类间方差最大或类内方差最小为阈值选取准则,在很多情况下都能取得良好的分割效果.这种传统的Otsu 法在进行多阈值图像分割时效果不理想,如图3 所示的直方图中存在多个峰值,且峰值间距较大,各个峰值所在区间窄小,不适合采用传统的最小类内方差法.
传统最小类内方差分割法的算法实现步骤如下:
(1)通过直方图统计得出该图像的最大和最小灰度值M、m,取T0=(M +m)/2 作为分割目标与背景的初始阈值,将图像分C1和C2两类,如图4 所示.
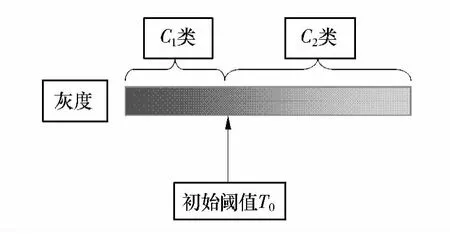
图4 阈值分割原理Fig.4 Principle of threshold segmentation
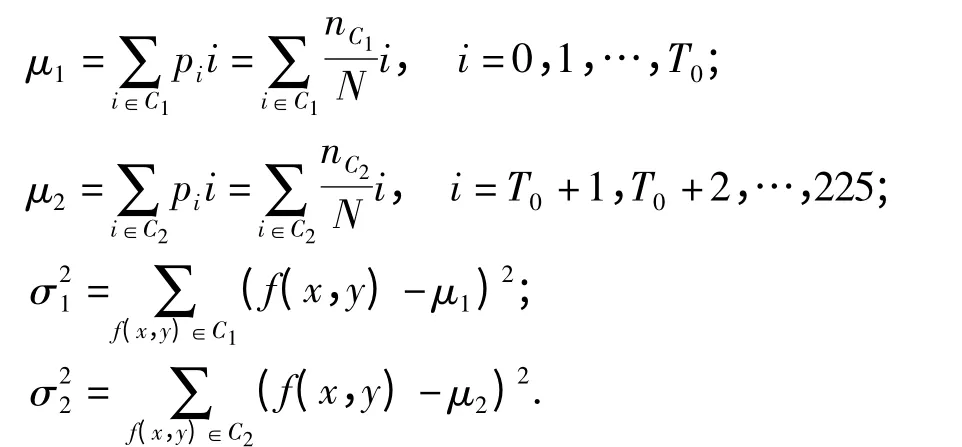
(2)分别计算两类像素在图像中的分布概率p1、p2,

式中:N=nC1+nC2,表示整副图像的所有像素数;nC1表示图像中C1类的像素数,nC2表示图像中C2类的像素数.计算分布概率密度主要是为了统计该类像素对整幅图像的影响程度.概率密度越大,则该类像素在整幅图中的比重越大.
(3)分别计算两类的类内均值μ、方差σ,
(4)选择最佳阈值T=T*,使类内方差为最小.

最小类内方差法可以计算得到统计意义上的最佳分割阈值,有效实现目标和背景的分割.但该方法在多阈值分割中不满足这一条件. 从另一个角度分析,该方法的实质是在直方图中相邻两个波峰间找到一个统计意义上的最佳波谷,划分开两个独立的波峰,从而区分开目标、背景.从这点出发,文中把最小类内方差单阈值分割法推广到多阈值分割应用中.
2.4 改进的最小类内方差多阈值分割算法
下面将对Otsu 单阈值分割算法进行改进,提出最小类内方差多阈值分割算法.由于标准的最小类内方差分割算法需要计算2 次统计量,通过穷尽搜索整个直方图计算最佳阈值,虽能够得到全局最优解,但是计算量大、用时长、效率不高.为缩小搜索范围,减少整体计算量,提高运算速度,文中按照使搜索区域中最大限度地包含蛇体步态信息的原则,提取整幅图像的感兴趣区域(ROI),然后在ROI 内划分局部子区域,再在各子区域内运用最小类内方差法搜索定位局部最优阈值,进而实现整幅图像的多阈值分割.
ROI 提取技术在图像处理中应用广泛,有多种提取算法[15-17].文中借鉴Tang 等[15]提出的算法,采用基于像素点的区域生长法.观察图3 所示的直方图,波谷区间宽,交叠成分少,图像中各个颜色子区域的差异较大,近似独立区域.自动捕捉子区域内峰值点像素(x0,y0)为生长的起点种子,遍历该像素点的相邻4 像素(xi,yi)(其中i =1,2,3,4),以(xi,yi)的颜色信息属于(x0,y0)的H 分量直方图统计区域作为生长条件;当相邻像素与种子像素有相似H 分量性质时,则合并到种子像素所在的区域中;再将这些新像素当作新的种子继续上面的过程,直到没有满足条件的像素可被包括进来.这样一个区域就生长成了.为包含更多的图像信息,更直观地反映出感兴趣部分,文中在采用区域生长法基础上,结合基于用户交互的ROI 提取方法[18-19],借助简单易实现的通用方形框来包含显示待检索的范围.提取结果如图5 所示.可以看出,ROI 方框区域包含了所有蛇体步态信息,同时减小了背景的比重,这将极大地缩小搜索范围.
图5 提取ROI 区域Fig.5 Extraction of ROI region
由于文中给出的直方图中各个波峰细长,间距大,波谷区间宽,所以各个局部峰值即可看作独立峰值.这样,在ROI 区域内将目标按局部独立峰值分割成[C1,C2]、[C2,C3]、[C3,C4]、[C4,C5]共4 个局部区域,见图6.
另外,为加大在局部区域的搜索范围,提高搜索精度,引入松弛变量s.由于图像中各关节组子区域在ROI 内比重小,其直方图统计量也较少,经多次实验发现,当各个独立区域内扩大搜索范围不超过2 个像素,即取s=0.05%Ci时,分割效果最佳;此时算法在局部区域搜索的范围为[Ci-s,Ci+1+s],其中Ci、Ci+1(i =1,2,3,4)是ROI 内直方图相邻的两波峰值.之后每次在各子区域内运用最小类内方差法的步骤(1)-(4),求解出局部最佳阈值;当各个局部区域完成了分割时,表示整幅图像完成了多阈值分割.
改进的算法的流程图和步骤如图7 所示.明显分析出当前所属的具体的步态类型,整体分割效果较理想.采用传统灰度多阈值分割算法的效果如图9 所示,其分割过程慢于改进算法.

图8 改进算法的分割效果Fig.8 Segmentation results of improved algorithm

图6 ROI 内划分的4 个子区域Fig.6 Four sub-regions divided within ROI

图7 改进算法的流程图Fig.7 Flowchart of improved algorithm
3 实验结果
运用文中提出的改进的最小类内方差多阈值分割算法,对图2 所示的原图像进行多目标的多阈值分割,效果如图8 所示.
由图8 可看出,经过该算法的处理,蛇形机器人的5 个关节组均被清楚地分割出来,通过与原图对照可见,步态的走向和蛇体的弯曲程度保持良好,能明显分析出当前所属的具体的步态类型,整体分割效果较理想. 采用传统灰度多阈值分割算法的效果如图 9 所示,其分割过程慢于改进算法

图9 传统分割算法的分割效果Fig.9 Segmentation results of traditional segmentation algorithms
可明显看出,采用传统灰度多阈值分割算法不能准确地分割出蛇形机器人的各个关节组,某些分段的分割效果模糊,边缘不连续,无法识别判定出蛇体的具体关节组和步态走向,整体分割效果较差.
为证明本算法对各种步态变化分割效果的鲁棒性,文中又做出如下验证:选取蛇形机器人从螺旋步态转化到蜿蜒爬行步态的视频帧,在线采用本算法进行处理,得到如图10 所示的分割效果.从图10 可看出,尽管视频拍摄中受到光照、运动扭曲、关节遮挡、步态变换等外界干扰的影响,但是图像整体的分割效果依然很理想:蛇形机器人各个关节组被清楚地分割出来,能识别出当前步态的走向和蛇体的弯曲程度,对抗光线和步态变化干扰的鲁棒性得到体现.
4 结语
文中提出的改进的最小类内方差分割算法是在传统Otsu 单阈值分割算法的基础上提出的,是一种有效的多阈值自动分割方法.在该方法中,通过把图像转化到HSV 颜色空间提高对光照、光线反射等的鲁棒性,分析被分割图像H 分量直方图的多峰特点,设置感兴趣区域(ROI),极大地减少了算法整体计算量;在ROI 子区域内引入松弛变量,极大减少分割的盲目性,确保得到的阈值具有统计意义上的局部最优性.文中提出的方法能够自动得到具有实际物理意义的多分割阈值. 它为复杂图像的多目标分割处理提供了一种很好的方法,将有助于后续的对蛇形机器人步态的定位、跟踪、校准等工作的进行.

图10 螺旋步态和蜿蜒爬行步态的分割效果Fig.10 Segmentation results of spiral gait and winding crawl gait
由此可见,文中基于改进的Otsu 最小类内方差分割算法得到的阈值有很明确的物理意义. 将算法用于蛇形机器人的其他步态也能得到很好的分割效果,说明该算法对光线及步态的鲁棒性和自适应性较好.
对于利用蛇形机器人从事实际检测工作时所发生的关节遮挡问题,在步态的动态规划理论中有相应解决办法.由于将在机器人本体安放多个摄像头,位于首、尾的两摄像头在优化步态下近似双目视觉系统,更多地负责蛇体自身的姿态采集,能避免图像拍摄时的关节遮挡问题.
蛇形机器人的工作环境较简单,在蛇体上迷你摄像头采集的视频图像中,背景所占比重小,颜色较单一;当有复杂背景颜色与蛇体某组关节颜色相近时,经滤波和ROI 处理后,复杂背景颜色对蛇体整体的步态走向和蛇体的弯曲程度影响不大,可以识别出当前步态.
[1]林开颜,吴军辉,徐立鸿.彩色图像分割方法综述[J].中国图象图形学报,2005,10(1):1-10.Lin Kai-yan,Wu Jun-hui,Xu Li-hong. A survey on color image segmentation techniques[J].Journal of Image and Graphics,2005,10(1):1-10.
[2]郭臻,陈远知.图像阈值分割算法研究[J].中国传媒大学学报:自然科学版,2008,15(2):77-82.Guo Zhen,Chen Yuan-zhi. Research of thresholding methods for image segmentation[J].Journal of Communication University of China:Science and Technology,2008,15(2):77-82.
[3]孙洪.攀爬蛇形机器人的研究[D].上海:上海交通大学机械工程学院,2007.
[4]Song Tianlin,Zao Ling,Shen Xuanxuan. The research on remote control robot snake driving by servo[J].Procedia Engineering,2011,15:762-766.
[5]Liljebäck P,Pettersen K Y,Stavdahl O,et al.A review on modelling,implementation,and control of snake robots[J].Robotics and Autonomous Systems,2012,60(1):29-40.
[6]Sezgin M,Sankur B.Survey over image thresholding techniques and quantitative performance evaluation[J].Journal of Electronic Imaging,2004,13(1):146-168.
[7]潘春雨,卢志刚,秦嘉.基于区域阈值的图像分割方法研究[J].火力与指挥控制,2011,36(1):118-121,137.Pan Chun-yu,Lu Zhi-gang,Qin Jia. Research of image segmentation based on area threshold[J].Fire Control &Command Control,2011,36(1):118-121,137.
[8]Beucher S,Lantuejoul C.Use of watersheds in contour detection[C]∥International Workshop on Image Processing:Real-Time Edge and Motion Detection/Estimation.Rennes:[s.n.],1979.
[9]Ye Z,Mohamadian H,Ye Y.Gray level image processing using contrast enhancement and watershed segmentationwith quantitative evaluation[C]∥Proceedings of CBMI.[S.l.]:IEEE,2008:470-475.
[10]Frucci M. Over-segmentation reduction by flooding regions and digging watershed lines [J]. International Journal of Pattern Recognition and Artificial Intelligence,2006,20(1):15-38.
[11]陶立超,赵宇明.基于分块颜色直方图和粒子滤波的物体跟踪[J].计算机工程与应用,2012,48(7):165-168.Tao Li-chao,Zhao Yu-ming.Object tracking based on subblock color histogram and particle filter[J]. Computer Engineering and Applications,2012,48(7):165-168.
[12]吴涛,秦昆,区磊海,等.图像二维阈值分割的数据场方法[J].华南理工大学学报:自然科学版,2010,38(11):128-134.Wu Tao,Qin Kun,Ou Lei-hai,et al.Data field-based method for image segmentation with two-dimension threshold[J]. Journal of South China University of Technology:Natural Science Edition,2010,38(11):128-134.
[13]谭优,王泽勇.图像阈值分割算法实用技术研究与比较[J].微计算机信息,2007,23(24):289-299,233.Tan You,Wang Ze-yong. Study on applied technology arithmetic of image threshold segmentation[J]. Microcomputer Information,2007,23(24):289-299,233.
[14]Otsu Nobuyuki.A threshold selection method from graylevel histograms [J]. IEEE Transactions on Systems,Man and Cybernetics,1979,9(1):62-66.
[15]Tang Jun.A color image segmentation algorithm based on region growing [C]∥Proceedings 2010 2nd International Conference on Computer Engineering and Technology(ICCET).Chengdu:IEEE,V6-634-V6-637.
[16]Zhang KeDai,Lu HanQing,Duan MiYi,et al.Automatic salient regions of interest extraction based on edge and region integration[C]∥Proceedings of 2006 IEEE International Symposium on Industrial Electronics.Montreal:IEEE,2006:620-623.
[17]斯白露,高文,卢汉青,等.基于感兴趣区域的图像检索方法[J].高科技通讯,2003,13(5):13-18.Si Bai-lu,Gao Wen,Lu Han-qing,et al. An image retrieval method based on regions of interest [J]. High Technology Letters,2003,13(5):13-18.
[18]唐俊华,阎保平.基于用户定义感兴趣区域的图像检索算法[J].计算机应用,2002,22(11):20-22.Tang Jun-hua,Yan Bao-ping. Image retrieval based on user defined region-of-interest [J]. Computer Application,2002,22(11):20-22.
[19]杨益军,赵荣椿.一个快速的人际交互式目标分割系统[J].西北工业大学学报,2000,18(2):289-292.Yang Yi-jun,Zhao Rong-chun. A fast interactive system for object segmentation [J]. Journal of Northwestern Polytechnical University,2000,18(2):289-292.
