时滞反馈及轴力作用下弹性梁的非线性振动*
2013-08-15赵珧冰王连华
彭 剑,赵珧冰,王连华†
(1.湖南大学 机械与运载工程学院,湖南 长沙 410082;2.湖南大学 土木工程学院,湖南 长沙 410082)
研究者在航空航天、桥梁、建筑和防护工程等领域,广泛研究了端部非刚性支承梁的非线性振动与控制.通常而言,结构的内部阻尼很小,在受到外部干扰时易产生大幅振动,并持续较长时间,从而影响结构的正常工作,并可导致疲劳破坏,影响其使用寿命[1-3].
压电材料与结构复合而构成的主动控制系统是解决结构振动问题的有效方法,可将其应用于土木工程结构的监测、抗振、抗风、安全评定和自适应修复等问题[4-5].然而对于工程的主动控制系统,时滞问题不可避免.其中时滞有控制系统本身固有的(信号采集、传输,控制器的计算,作动器作动等),也有外部引入(数字滤波器的使用等)的.胡海岩和王在华[6]从时滞动力学系统的特点、研究方法、动力学热点问题出发,对时滞动力学研究进展作了综述;蔡国平、陈龙祥[7-8]研究了时滞对系统稳定性的影响,指出主动控制系统的时滞存在可利用的价值;徐鉴等[9]研究了时滞对控制系统的影响,并指出主动控制系统中的时滞可作为控制和产生复杂运动的控制“开关”;Masoud 和 Nayfeh 等[10-11]研究了结构振动的时滞输出反馈控制器设计,并利用状态时滞反馈控制起重机的振动问题,对起重机的振动起到了很好的控制效果;Daqaq和 Alhazza等[12-13]研究了加速度时滞反馈作用下悬臂梁的非线性振动问题.
本文对轴力作用下弹性梁的时滞反馈控制进行研究,给出了系统稳定性条件,得到了时滞动力系统的分岔响应,最后通过算例表明时滞或控制增益的变化可能导致周期运动、拟周期运动等.
1 振动控制方程
图1所示为轴力作用下弹性支座梁与压电作动器和传感器共同构成的闭环反馈控制系统.其中l为梁的长度,w为梁宽,p为轴向作用力,k为弹性刚度系数,b为压电材料宽度,E和Ea分别表示梁和压电材料的弹性模量,I为截面惯性矩,d31为压电材料的电荷压电常数,2ta表示压电作动器的厚度,Va(t)表示外加控制电压,d表示压电材料中截面距梁结构中截面距离,x1和x2分别表示作动器固定在梁上的位置坐标,x3表示传感器的位置坐标.
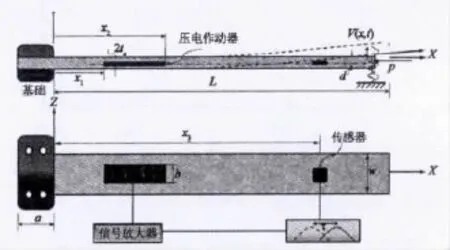
图1 时滞反馈激励梁控制系统结构图Fig.1 A schematic of a beam with delayed feedback actuation
假设该悬臂梁不可伸长且忽略其扭转和剪切变形[2-3],假设压电材料是理想地埋入梁内,不考虑压电材料的质量及刚度影响,Nayfeh[14]给出了轴力作用下的悬臂梁的非线性动力学方程:
本文考虑弹性支座和压电激励作用,则其运动方程为:
边界条件为:

方程(1)和(2)中,m,c分别表示梁的线密度、阻尼,q(x,t)是由压电作动器产生的分布荷载,表示为[15]:
M为压电材料产生的应力关于整个结构中性轴的力矩,其表达式为:

运用Galerkin方法对其位移函数v(x,t)进行展开:

其中,φi(x)为振型函数,其表达式可通过线性控制方程求得:
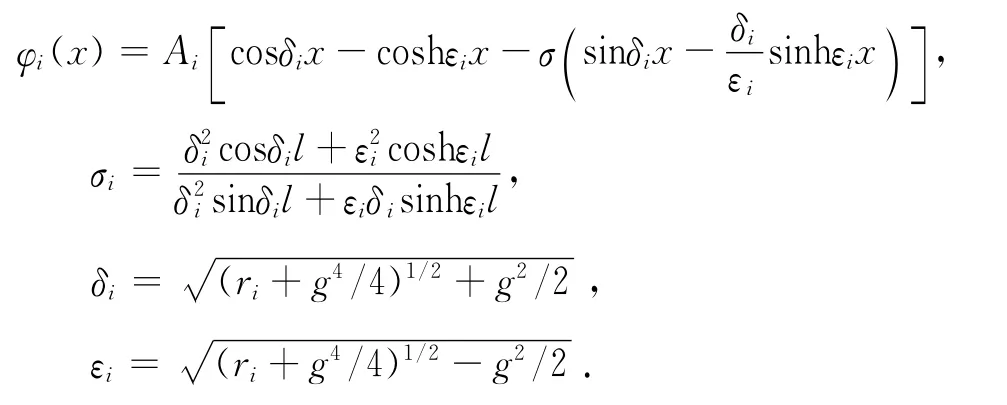
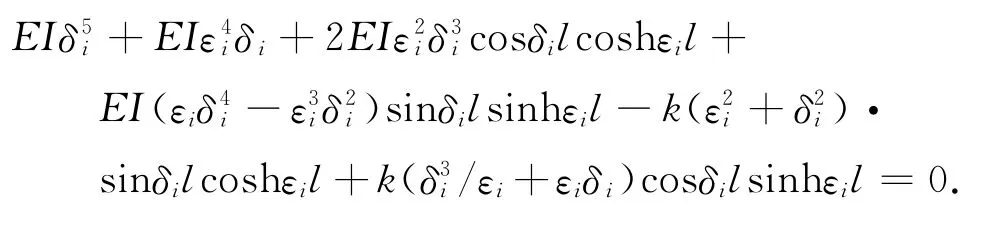
其中,ri由如下超越方程给出;
将式(4)代入式(2),并进行Galerkin积分可以得到:
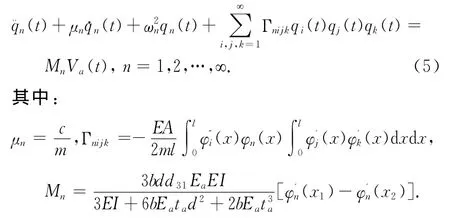
方程(5)为振动控制方程,将其无量纲化,取t*=ω1t,τ*=ω1τ和q*n=qn(t)/l,则无量纲化方程为:
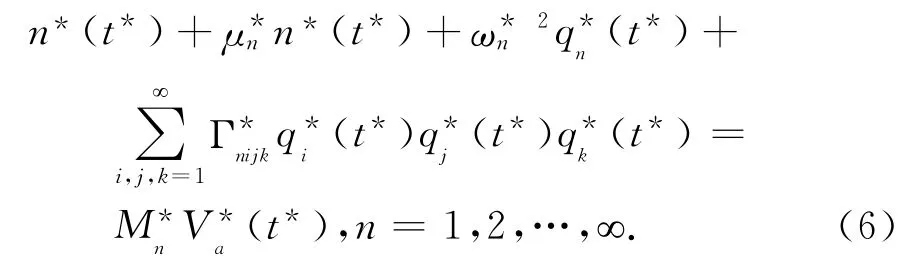
其中,ωn*=ωn/ω1是第n阶模态无量纲化固有频率,μn*=μn/ω1,Γn*ijk=Γnijkl2/ω21,Mn*=Mn.下文为了方便,去掉方程中的星号.
本文考虑压电激励的驱动电压采用加速度时滞反馈策略,记为如下形式:

其中为控制增益,τ为时滞,记将Va(t)代入方程(6),可以得到如下闭环系统:
则单模态梁的响应方程为

2 线性稳定性分析
将方程(9)线性化,可写成如下的方程:

方程(10)的解由以下形式给出:

其中An是振幅,ξn是阻尼系数,λn为响应频率.将方程(11)代入方程(10),分离实虚部并令其分别等于0,整理可得:
其中γ=τ/2π,对于给定的控制增益kann和时滞τ,λn和ξn可以由方程(12)求出.根据叠加原理,方程(10)的一般解可以记为

通过研究方程(13),当ξj>0时,系统是稳定的,而当ξj<0时,系统不稳定.线性稳定性边界对应于ξj=0,其余的ξj>0.为了得到线性稳定性的边界,在方程(12)中令ξn=0,可得:
其中是稳定性边界的临界时滞反馈频率.利用临界条件求解方程(14)可以得到如下表达式
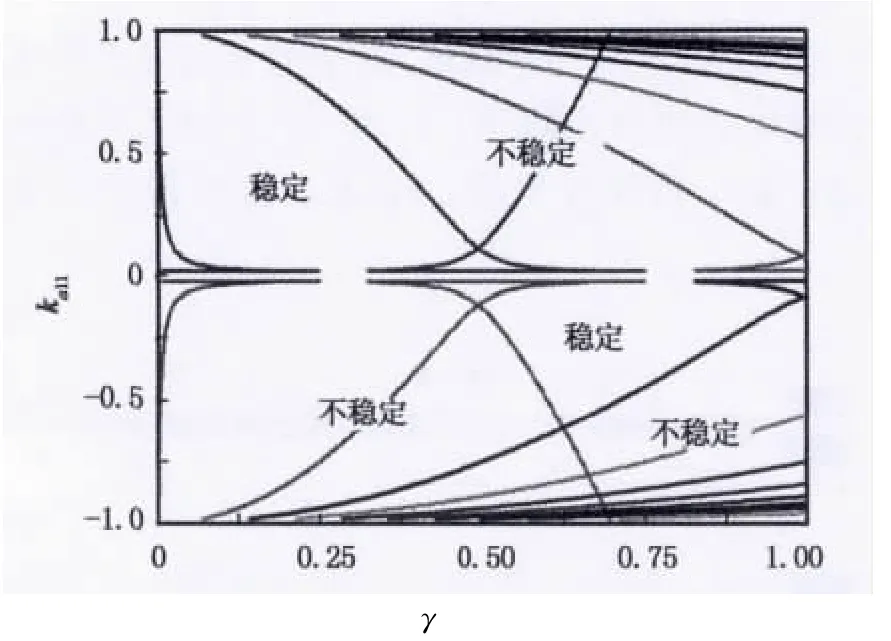
图2 系统稳定性图(n=1,μ1=0.02)Fig.2 The stability diagram of system (n=1,μ1 =0.02)
根据方程(15),得到稳定性区域图(见图2).如图2所示,在 (γ,ka11)平面内,随着γ的增大,稳定性区域逐渐减小.当确定时滞为某一个值时,系统的稳定性随着ka11的增大而发生改变,即由稳定变为不稳定或者由不稳定变为稳定.因此,可以通过固定系统的某些参数值,调节时滞τ或增益ka11来确定系统的稳定性.
3 非线性稳定性分析
由前一节的理论分析得到(γ,ka11)平面内的稳定性区域,在其稳定性边界,很小的扰动可能导致系统的不稳定解,而非线性在抑制非平凡解的产生中起着非常重要的作用.因此,本节着重探讨系统非线性行为以及评估非平凡解的稳定性.
3.1 分岔范式
运用多尺度法[16],引入不同的时间尺度及微分算子:
其中:ε为小参数,Dn=∂/∂Tn.方程(9)解可以表示成如下形式:
因此时滞响应可以写为[17]:

将式(18)按ε展开为
对于一个临界的时滞周期,接近稳定性边界的临界增益的任意增益kann通过参数k描述为

将式(15)-(19)代入式(8),并计算ε各次幂的系数,有
其中:qni(T0-)≡qni(T0-,T1,T2).仅考虑(ξ=0),因此,方程(20)的解可记为:
其中:An是未知的复函数,cc是复共轭.给定An的表达式可以求得周期为T0的qn2,qn3.同样地,将方程(24)代入方程(21),消去永期项,可得到D1An=0,D1=0,可知An与时间T1无关.满足这些条件,方程(22)的解可以约化为:

由方程(24)和方程(25)求得qn1,qn2将其代入方程(23),消去永期项,可以得到
其中:An是梁在时滞反馈控制下第n阶模态的有效非线性系数,An=-3Γnnnn.为求解方程(26),将An(T2)记为极坐标形式

其中:an(T2)和βn(T2)为实函数.将方程(27)代入方程(26)中,分离实虚部,整理可得:

由方程(14)可知:
从式(28)中可求得
方程(30)就是Hopf分岔的范式.为了求得平衡点,令a'n=0,代入方程(30)有
根据式(31)可知:平凡平衡点在k=0处发生了分岔,在该分岔处an[1]=an[2]=an[3].随着k的改变,由表达式的符号确定两个非平凡平衡点出现.对应于这些非平凡点的相位为:
因此,qn(T0,T2)对应于这些非平凡平衡点的系统响应是周期运动,表明分岔 (an,k)= (0,0)是Hopf分岔.考虑An¯μn的两种可能情况并考查对应的Hopf分岔:
a)>0:当k<0时,存在3个平衡点,并且仅有平凡解存在于k>0.当k<0(k>0)时平凡解稳定(不稳定),非平凡解不稳定.
b)<0:当k>0时,存在3个平衡点,并且仅有平凡解存在于k<0.当k>0(k<0)时平凡解稳定(不稳定),非平凡解不稳定.
在上述两种情况下,Hopf分岔是亚临界的,如图3(a)所示.
a)>0:当k>0时,存在3个平衡点,并且仅有平凡解存在于k<0.当k<0(k>0)时平凡解稳定(不稳定),非平凡解稳定.
b)^kann<0:当k<0时,存在3个平衡点,并且仅有平凡解存在于k>0.当k>0(k<0)时平凡解稳定(不稳定),非平凡解稳定.
在上述两种情况下,Hopf分岔是超临界的,如图3(b)所示.
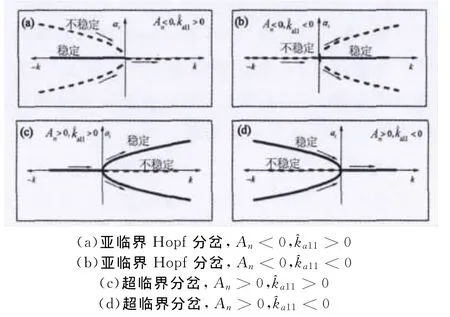
图3 定点及其稳定性示意图Fig.3 Sketches of fixed points and their stability
3.2 周期解及其稳定性
本节研究梁的第一阶模态非线性动力自由响应,讨论其周期解在时滞为某一确定值时随增益的变化而发生改变的情形.梁和压电激励器的尺寸和材料特性参数如表1所示.在数值模拟中,除了时滞增益ka11作为控制参数或分岔参数外,其他参数取固定值.此外,选取γ=0.2,μ=0.02,当q·(t)=0时,通过对方程(9)(取n=1)数值计算得到其分岔映射,如图4所示.
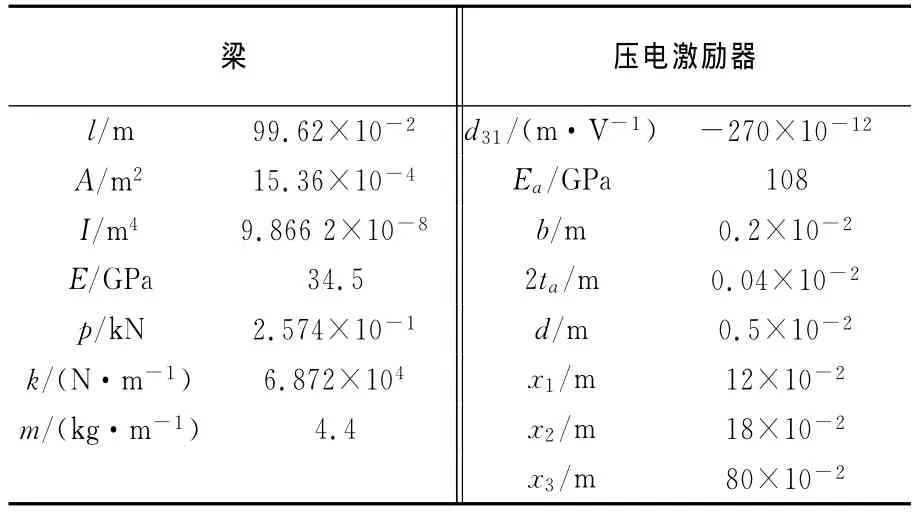
表1 梁和压电激励器的尺寸和材料特性参数Tab.1 Geometric and material properties of the beam and piezoelectric actuator
从图4中可以看出,随着时滞增益ka11值的增大,非平凡解经过混沌运动,拟周期运动周期运动,最后在点A(ka11=≈-0.38)处通过亚临界Hopf分岔产生稳定的平凡解.
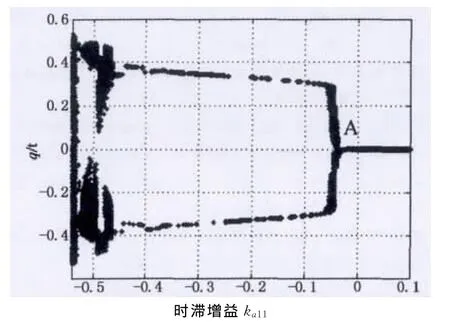
图4 梁的第一阶模态响应随时滞增益ka11变化的分岔图Fig.4 Bifurcation diagram of the beam first mode tip deflection with variations in the delay gain ka11
图5给出了系统混沌运动下的时程曲线和相图.当ka11=-0.54,系统出现不规则响应,由图中可以看出,系统的不规则响应在t=35左右被激发出来.图6为拟周期运动,当ka11=-0.4时,得到该系统响应时程和相图.图7所示的是系统在ka11=-0.36时的周期解,由分岔图我们可以看出,此时是倍周期分岔.
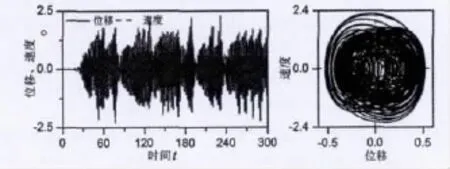
图5 时滞增益ka11=-0.54时梁的第一阶模态响应的时程曲线和相图Fig.5 Time history curve and phase diagram of the beam first mode response at the delay gain ka11 =-0.54
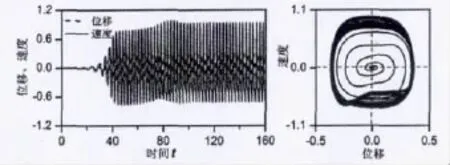
图6 时滞增益ka11=-0.4时梁的第一阶模态响应的时程曲线和相图Fig.6 Time history curve and phase diagram of the beam first mode response at the delay gain ka11 =-0.4
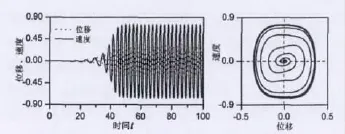
图7 时滞增益ka11=-0.36时梁的第一阶模态响应的时程曲线和相图Fig.7 Time history curve and phase diagram of the beam first mode response at the delay gain ka11 =-0.36
图8和图9中梁的第一阶模态响应趋于稳定.在图8中,时滞增益ka11=-0.005,而在图9中,时滞增益为ka11=0.1.通过对比发现,当时滞增益逐渐增大时,系统趋于稳定的时间缩短.分别地,当ka11=-0.005时,系统在t=500左右趋于稳定;当ka11=0.1时,系统在t=80时稳定.
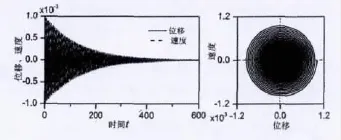
图8 时滞增益ka11=-0.005时梁的第一阶模态响应的时程曲线和相图Fig.8 Time history curve and phase diagram of the beam first mode response at the delay gain ka11 =-0.005
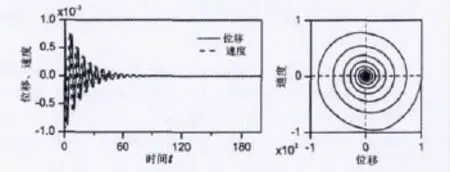
图9 时滞增益ka11=0.1时梁的第一阶模态响应的时程曲线和相图Fig.9 Time history curve and phase diagram of the beam first mode response at the delay gain ka11 =0.1
4 结 论
本文运用加速度时滞反馈对系统进行控制,讨论了系统的稳定性及分岔特性,表明时滞的存在可能会导致系统不稳定,但在稳定性区间内,加速度时滞反馈控制具有良好的效果.因此,我们可以将时滞或时滞增益作为控制参数,不仅控制系统的复杂动力学行为到简单的动力学行为,而且可以导致系统出现包括倍周期、拟周期和混沌运动.同时,本文中提出的加速度时滞反馈控制器在实际中容易实现,可以为工程振动控制研究领域应用提供理论基础.
[1] ANTHONY D K,ELLIOTT S J.Comparison of the effectiveness of minimizing cost function parameters for active control of vibrational energy transmission in a lightly damped structure[J].Journal of Sound and Vibration,2000,237(2):223-244.
[2] CRESPO DA SILVA M R M,GLYNN C C.Nonlinear flexural-flexural-torsional dynamics of inextensional beams.I:equation of motion[J].Journal of Structural Mechanics,1978,6(4):437-448.
[3] CRESOP DA SILVA M R M,GLYNN C C.Nonlinear flexural-flexural-torsional dynamics of inextensional beams.II:forced motions[J].Journal of Structural Mechanics,1978,6(4):449-461.
[4] 李书进,翟伟廉,王军武.压电材料智能控制器对框架结构地震反应的主动控制 [J].地震工程与振动控制,2000,20(1):100-104.LI Shu-jin,QU Wei-lian,WANG Jun-wu.Piezoelectric intelligent control device and its active control for earthquake induced responses of frame structure[J].Earthquake Engineering and Engineering Vibration,2000,20(1):100-104.(In Chinese)
[5] HAN Sang-jun.Active/passive seismic control of structures[D].Washington:The Catholic University of America,2002.
[6] 胡海岩,王在华.非线性时滞动力系统的研究进展 [J].力学进展,1999,29(4):501-512.HU Hai-yan,WANG Zai-hua.Review on nonlinear dynamic systems involving time delay[J].Advances in Mechanics,1999,29(4):501-512.(In Chinese)
[7] 蔡国平.存在时滞的柔性梁的振动主动控制 [J].固体力学学报,2004,25(1):29-34.CAI Guo-ping.Active vibration control of a flexible beam with time delay in control[J].Acta Mechanica Solida Sinica,2004,25(1):29-34.(In Chinese)
[8] 陈龙祥,蔡国平.旋转运动柔性梁的时滞主动控制实验研究[J].力学学报,2008,40(10):520-527.CHEN Long-xiang,CAI Guo-ping.Experimental study on active control of a rotating flexible beam with time delay [J].Chinese Journal of Theoretical and Applied Mechanics,2008,40(10):520-527.(In Chinese)
[9] 徐鉴,陆启韶.非自治时滞反馈控制系统的周期解分岔和混沌[J].力学学报,2003,35(4):443-451.XU Jian,LU Qi-shao.Bifurcation and chaos due to time delay in a delayed control non-autonomous system [J].Chinese Journal of Theoretical and Applied Mechanics,2003,35(4):443-451.(In Chinese)
[10] MASOUD Z,DAQAQ M F,NAYFEH N H.Pendulation reduction of small telescopic cranes[J].Journal of Vibration and Control,2004,10:1167.
[11] MASOUD Z,NAYFEH A H,AL-MOUSA A.Delayed-position feedback controller for the reduction of payload pendulations on rotary cranes[J].Journal of Vibration and Control,2002,8:1-21.
[12] DAQAQ M F,ALHAZZA K A,ARAFAT H N.Non-linear vibrations of cantilever beams with feedback delays[J].International Journal of Non-Linear Mechanics,2008,43:962-978.
[13] ALHAZZA K A,MASOUD Z N,ALAJMI M.Nonlinear free vibration control of beams using acceleration delayed-feedback control[J].Smart Materials and Structures,2008,17(1):1-10.
[14] NAYFEH A H.Linear and nonlinear structure mechanics[M].New York:Wiley Interscience,2004.
[15] CRAWLEY E F,LAZZARUS K B.Induced strain actuation of isotropic and anisotropic plates[J].AIAA J Guidance Control Dynamics,1991,29:944-951.
[16] NAYFEH A H.Perturbation methods[M].New York:Wiley Interscience,1973.
[17] NAYFEH A H.Order reduction of retarded nonlinear systems-the method of multiple scales versus center-manifold reduction[J].Nonlinear Dynamics,2008,51:483-500.
