CTCS-2级列控车载ATP设备应用于普速机车的适应性分析及仿真研究
2013-08-04武晓春潘长玉
卢 军,武晓春,潘长玉
(1.兰州交通大学自动化与电气工程学院,兰州 730070;2.中铁第一勘察设计院集团有限公司通信信号设计处,西安 710043)
近年来,随着合宁、合武、温福、甬台温、福厦等时速200~250 km客运专线陆续开通,我国在CTCS-2级列车运行控制系统集成、技术标准制订、设备引进和研发、列控试验、工程建设等各项技术上已经逐步由实践走向成熟,其中,车载ATP系统是保证列车安全、高效运行的关键设备。正在建设中的兰新第二双线,由于线路所处环境恶劣,站间距大,风沙灾害严重等特点[1],致使本线列控系统配置方案有诸多特点,其中普速列车上客运专线运行技术方案之一是研发针对普速客运列车的车载ATP系统。
本文提出一种基于CTCS-2级列控车载ATP设备的超速防护系统低速适应性改造方案,并对方案进行可行性研究,最后,对车载ATP系统进行仿真验证。
1 CTCS-2级列控车载ATP设备应用于普速机车的改造方案原理及构成
系统采用基于CTCS-2级列控车载ATP设备的2×2取2安全结构设计,核心部件由车载安全计算机(VC)、轨道信息接收单元(STM)、应答器信息接收单元(BTM)、制动接口单元(RLU)、记录单元(DRU)、测速测距单元(SDP)、人机界面(DMI)、轨道信息接收天线、应答器信息接收天线等组成。工作方式采用车载主机方式:从应答器取得线路固定工程数据(如轨道电路长度、坡度、静态限速和道岔限速等),轨道电路显示信息告知前方空闲闭塞数、停车轨道电路和准许运行位置,然后车载计算核心从当前位置计算目标-距离模式曲线,并依据自己当前位置与模式速度值的关系,输出制动,最大限度地使控制符合运行实际。列车在制动到红灯前将留有一个安全防护距离,以防止由于计算机取用离散性参数而产生的误差[2]。
人机界面系统以动态图方式预示运行前方线路的弯道、坡道、桥梁、隧道、道岔以及信号机布置情况,随列车运行滚动显示控制模式限速曲线。
系统结构原理如图1所示。

图1 车载ATP系统结构原理
2 普速车车载ATP系统适应性研究
依据兰新第二双线设计批复意见,开通初期部分普速列车将会分段在不同等级的线路上运行,届时将会有装载ATP设备的动车在非C2线路区段运行,未加装ATP设备的普速列车也会在C2区段运行的情形,这就要求,车载设备要与地面设备尽可能匹配[2],目前我国在普速列车机车上仅安装了LKJ系统监测列车运行状况,不具备主体化机车信号功能,且该系统不能满足列控系统安全性SIL4等级要求,故普速车无法在客运专线上按照C2级列控模式运行。如果要实现普速车上客运专线运行,则需要进一步提高普速车LKJ设备的可靠性和安全性,并在机车上增加BTM天线接收应答器数据,增加实时更新线路信息和限速信息的功能,这样就面临两大问题:其一,对LKJ设备的改造工作量很大,LKJ设备既有结构和软件框架能否支持,尚无定论;其二,在没有装载车载ATP的情况下,以车载信号作为行车凭证,与目前的铁路行车规定不相符[1]。
CTCS-2级车载ATP设备技术成熟,性能稳定,已经被广泛应用于时速200~250 km动车组,普速列车在时速160 km下的运行指标(如机车、车辆基本阻力计算公式,制动距离、列车制动换算率、换算摩擦系数等)在《牵引计算规程》(TBT1407—1998)中已有具体规定,所以列车控制曲线计算不存在难点,所以暂时保留LKJ系统,并在其基础上研究C2列控车载ATP设备与普速机车间的适应性,并根据车辆的具体情况进行接口开发,如为其提供一个由继电器接点条件给出的紧急制动接口/全常用制动接口与现有车载制动接口匹配,同时进行软件开发,理论上可行。
3 普速车车载ATP关键技术研究
针对普速机车车长、车重、制动性能特点,从系统模块化集成角度,提炼出车载ATP系统关键技术点,并对各关键技术点进行深入研究,形成车载ATP系统分析的基本流程,为仿真系统编程提供方法。
3.1 测速测距接口设计
为保证ATP系统正常运行,必须随时准确监测列车速度和位置,为此,系统采用多个测速子系统互补运行,共同完成列车测速及定位。
在机车两侧不同的车轴上各安装2个速度传感器,使用脉冲信号计算列车运行速度,可以降低共模故障的风险性[3]。
安装2部非接触式多普勒雷达系统补充测量车速,其通过RS485串口与ATP主机通信,可以校正滑力和阻力造成的影响。
在测速测距过程中,车轮的直径是一个可以调整的值,通过人机接口设备,由维护人员输入轮径值,然后主机板将该值保存下来,直到下次修改,这种修改一般只能在设备处于维修工况时才能进行[4]。
3.2 地面ATP信息接收设计
BTM模块是采用2×2取2故障-安全技术的安全模块,1个BTM模块包含电源板、接口板、接收板、传输板,其负责接收、解调符合CTCS-2标准的地面应答器信息并提供精确定位。
STM模块也是安全模块,其通过STM天线接收到ZPW2000系列轨道电路及4信息、8信息、18信息等传统移频轨道电路信息后,会选择出电平最高的载频并解调该载频中低频(VLF)信号,判断信号码,最后将码序传输给安全计算机(VC)和LKJ监控装置。
4 ATP系统仿真
4.1 超速防护算法原理
首先,车载设备通过地面信息传输、解码,得到前方停车点或限速点信息;其次,车载设备根据速度采集模块的支持计算出列车至前方目标点距离,并以此为基点,依据线路数据库存储的数据及列车性能参数计算出目标距离模式曲线[5]。系统制动原理如图2所示。

图2 列车制动原理
目标距离制动模式曲线采用2条:一条为常用全制动模式曲线,另一条为纯空气紧急制动模式曲线,在此基础上实现超速预警及实施正常的常用制动或者紧急制动。
目标距离速度模式曲线计算的核心是制动距离的计算[6],根据《牵引计算规程》,普速列车动态制动距离计算公式为

式中 Sl——普速列车实际制动距离;
Sk——普速列车制动空走距离;
Se——普速列车制动有效距离。
本文考虑天线安装位置K及列车位置不确定模糊距离M

式中 K——悬垂距离(ATP安装天线与列车前部距离),取 3 m;
M——安全裕量,取50 m+0.5v0。
总延时时间内,列车作匀速运动,则可以根据公式(3)计算出总延迟时间内走行距离

式中 v0——制动初始速度;
td——列车制动总延时时间。
根据《牵引计算设计原则》,普速旅客列车制动总延时时间td按以下公式计算:
紧急制动总延时时间

常用制动总延时时间

式中 ts——ATP设备切断牵引力的延迟时间;
tq——启动常用/紧急制动延迟时间;
tk——列车纯空气紧急和常用(复合)制动空走时间。
有效制动距离计算公式

式中 vn-i-1、vn-i——速度间隔段的初速度和末速度;
φh——换算摩擦系数;
θh——列车换算制动率;
βa——制动系数,常用制动时 βc=0.8,紧急制动时βc=1;
w0——列车运行单位基本阻力;
ij——制动地段加算坡度。
在已知制动末速度情况下由公式(6)推得制动初速度的计算公式为系统交互数据流程见图3。

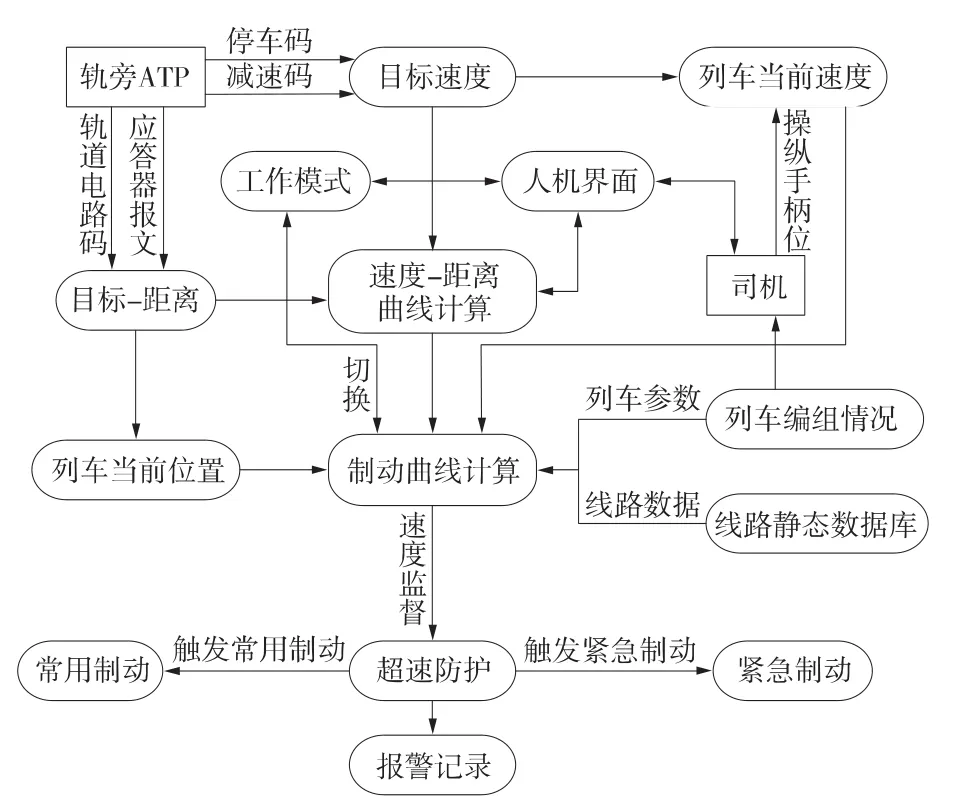
图3 系统交互数据流程
4.2 车载ATP算法实现步骤
由于一次制动距离的计算涉及线路、列车编组、车况等数据,需要采用迭代法分段进行速度-距离计算并累加计算结果[7],考虑计算精度,采取步长为Δs,安全制动曲线计算步骤:
(1)确定有效制动距离S;
(3)截取从制动末速度vn(速度目标点)到制动初速度vn-1(速度较大点)的一段长度为Δs的曲线作为目标曲线,根据公式(7)算出vn-1;
(4)判断vn-1是否超出线路限速vlim,如果vn-1<vlim,v[n-k]=vn-1;否则,v[n-k]=vlim;
(5)根据vn,vn-1计算本段平均速度
(6)利用平均速度 vi校正参数 θh,φh,βa,w0,ij;
(7)利用公式(6)计算本段有效制动距离si,j;
(8)令 k=k+1,判断计数器 k,如果 k< n,则 v[n-k]=vn-i-1,设置下一小区段的制动末速 vn-i-2=vn-i-1,转步骤3;如果k=n,则完成计算;
(9)将所有个离散点(si,j,vi)连起来。便构成制动距离曲线。
4.3 部分功能函数定义
部分功能函数定义如表1所示。
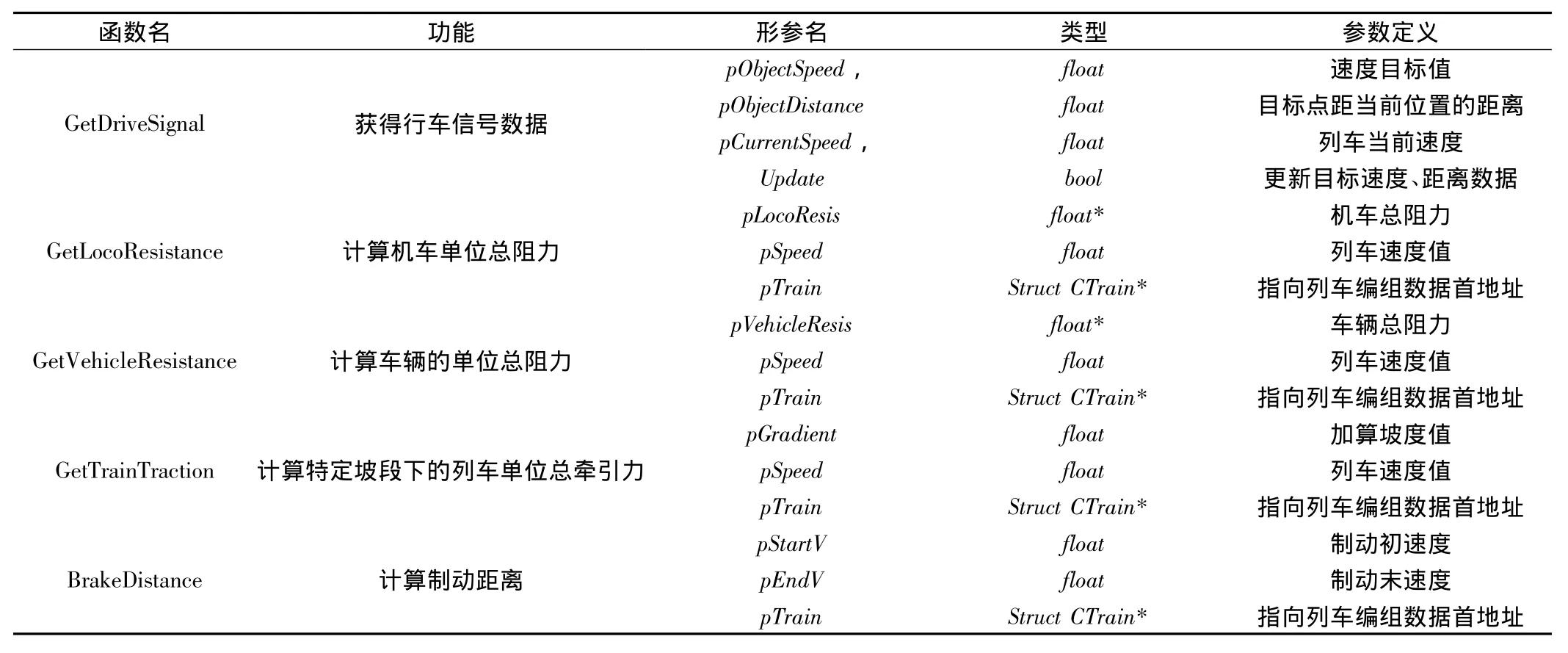
表1 函数定义
5 仿真结果
以SS8型机车为例进行仿真计算,采用18节列车编组,牵引及制动计算参数取自《轨道车运行控制设备技术规范》[2];线路数据取自兰新第二双线初步设计文档[8],人机交互界面依据《CTCS-2级列控车载设备人机界面(DMI)显示规范》等[9-10]设计,系统仿真结果如图4~图6所示。
图4 人机交互界面

图5 速度-距离曲线
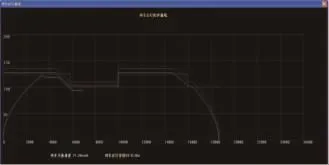
图6 列车运行防护曲线
6 结语
普速列车加载ATP理论和技术方面的研究,国内仅有1~2篇相关文献,相关研究机构也只有2~3家,并且近年来未见进一步报道,由此可见,国内在这方面的理论和方法研究基本处于一种空白状态,没有形成完整的理论和技术的支撑体系,但国外已有很多普速列车装备ATP应用的案例,代表了技术发展的方向。根据工程进展情况,结合普速客车装备ATP上线运行试验结果,详细研究适用于我国国情及部分工程的列控车载系统实施方案,可在繁忙路段实行客货分线运输[11],最大限度提升既有线货运能力,实现区域综合交通最优化,也利于我国铁路“走出去”战略的实施[12]。
将CTCS-2级列控车载ATP设备应用于普速列车机车的应用是个新课题,本文仅以实验室仿真的角度提出适应性改造方案有一定的局限性,同时,限于作者水平有限,文中必有疏漏之后,望更多信号及行车专业人员进一步批评指正。
[1]中铁第一勘察设计院集团有限公司.新建铁路兰州至乌鲁木齐第二双线修改初步设计(第三篇)/信号[Z].西安:中铁第一勘察设计院集团有限公司,2011.
[2]中华人民共和国铁道部运输局.运基信号[2009]35号 轨道车运行控制设备技术规范V1.0[S].北京:铁道部运输局,2009.
[3]HOW F,WRIGHT N,张在宁,等.车装载 ERTMS(ETCS&GSM-R)系统[J].铁道通信信号,2003(11):44-45.
[4]杨剑.CRH2列控车载测速测距设备EMC实验及防护方法[J].铁路通信信号工程技术,2010(10):23.
[5]郭彤城,慕春棣,刘韧,等.一种实用高速铁路ATP算法的设计与实现[J].清华大学学报:自然科学版,2000(7):51-54.
[6]高建强.CTCS-2级车载ATP设备应用于普速列车机车的关键技术研究[J].铁道通信信号,2011(6):1-3.
[7]郭宁,郭进.列车运行控制仿真系统(二)ATP列车超速防护仿真研究[J].铁道通信信号,2008(4):14-16.
[8]中铁第一勘察设计院集团有限公司.新建铁路兰州至乌鲁木齐第二双线甘青LXS-6标施工图线路详细纵断面图[Z].西安:中铁第一勘察设计院集团有限公司,2011.
[9]中华人民共和国铁道部运输局.运基信号[2007]20号 CTCS-2级列控车载设备 DMI显示规范 V1.0[S].北京:铁道部运输局,2009.
[10]和利时公司.ATP车载列控显示装置显示、提示音及按键规范[Z].北京:和利时公司,2006.
