施耐德昆腾PLC 跨网关数据传输实现方法
2013-07-13厉复兴张焕煜刘丛宝
厉复兴 李 强 张焕煜 刘丛宝
作者通联:日照港股份公司第一港务分公司设备技术科山东日照市黄海一路126号 276826
E-mail:13963037815@163.com
日照港股份公司第一港务分公司共有89 台流程装卸设备,分别属于9个单独的控制网络单元,其中81 台固定设备采用1个施耐德昆腾PLC(rio)网络结构,8 台移动设备(取料机、装船机)采用施耐德昆腾独立的MODBUS PLUS 网络结构。要对所有流程设备进行集中控制必须实现跨网关的数据传输,施耐德提供的方法有:①使用MSTR 功能块(只能使用4 次)。②使用指定的PEER COP 列表。③分布式(dio)通信(无法实现远距离传输)。
综合考虑,采用方法①发送、接收及访问全局网络,通过PLC编程,将昆腾PLC(rio)网络作为网络主站,昆腾MODBUS PLUS网络作为从站进行数据传输。在从站利用3个MSTR 功能块,外加1个5 次“ 轮询”的MSTR 功能块实现对8个分站的数据发送、接收,突破MSTR 功能块使用数量的限制,具体方法如下。
(1) 在Concept2.6 编程软件,点击“ online”→“ memory statistic”,测算每个PLC 控制单元(程序)的CPU 扫描周期。测算后9个独立主站的扫描周期分别为0.12s、0.059s、0.042s、0.037s、0.036s、0.042s、0.021s、0.0310s和0.028s。
(2) 建立系统时钟震荡功能块SYSCLOCK(图1),CLK1~CLK5 震荡时间分别是3.2s、1.6s、0.8s、0.4s和0.2s。先计算出大于9个独立PLC 扫描周期两倍的时间,最大扫描周期为0.12s,0.12×2=0.24s,在SYSCLOCK中选择大于且距离0.24s 最近的震荡触点,选择震荡时间为0.4s,将输出点接在M_RLT_1003,即M_RLT_1003每0.4s 置1 次1。
(3)建立计数功能块CTU_UINT(图2),每次M_RLT_1003 置1,参数R_RLT_1571 按照1→2→3→4→5 顺序增长。当R_RLT_1571 累积 5 次,R_RLT_1004置1,复位CTU_UINT,进行下一周期循环。
(4)建立等于功能块 EQ_UINT,建 立R_RLT_1571 值分别为1、2、3、4、5的5个MSTR 功 能块发送、接收及访问全局网络,图3 是R_RLT_1571 值为1的MSTR 功能块。

图1 SYSCLOCK 程序
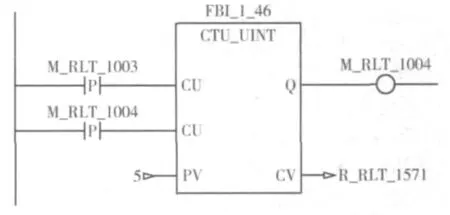
图2 CTU_UINT 程序
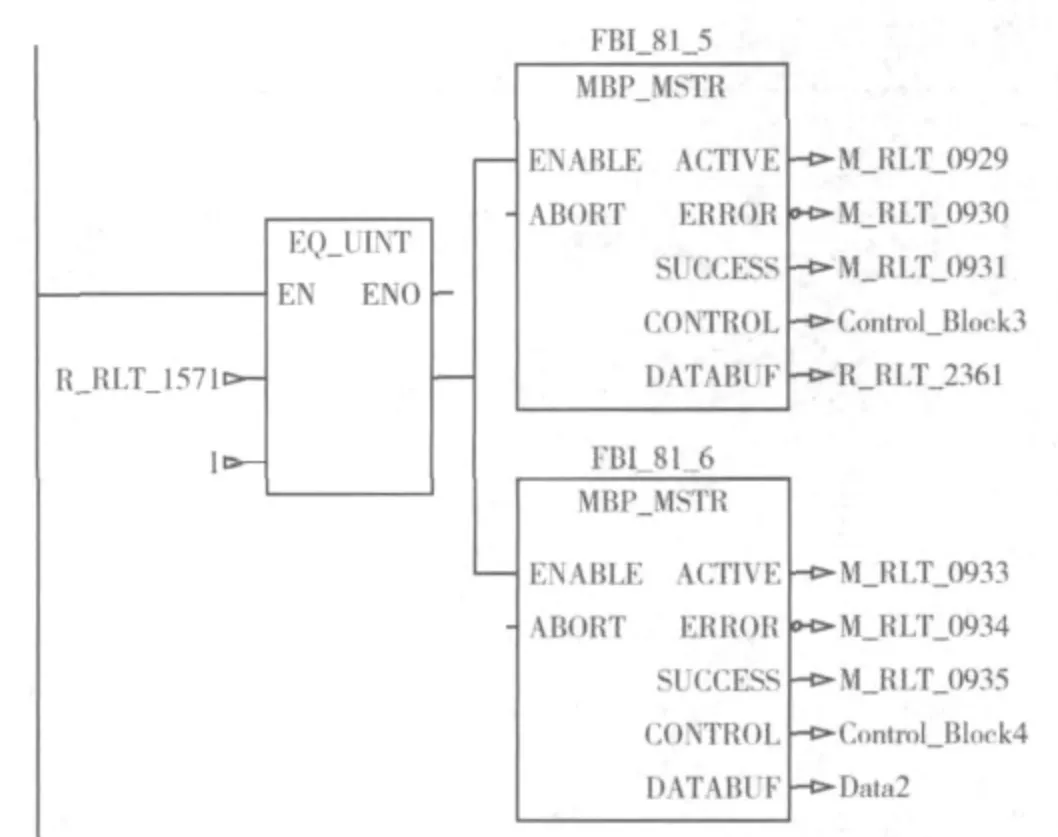
图3 EQ_UINT 程序
上述跨网络数据采集方法,只要合理计算出PLC的扫描时间,保证扫描周期的完整性,即可实现跨网关完整的数据交换,并可推广到其他类型PLC的跨网关数据传输。
