树苗劈接嫁接机器人机械系统设计与试验
2013-07-13赵栋杰
孙 群,赵栋杰,赵 颖
(聊城大学汽车与交通工程学院,山东聊城252059)
0 引言
树苗嫁接可加快优良树种繁育、增强抗病能力、改善果实品质、提高其环境适应能力。但迄今为止,树苗嫁接作业仍然延续传统的手工方式,导致劳动强度大、生产效率低、嫁接苗木的成活率也不高,而且不适应种植业季节性强的特点,难以实现树苗育苗工厂化生产[1-5]。有关树苗嫁接机器人的研究在国际上尚未见到报道,中国见诸文献报道的研究主要集中在苗木力学特性试验[6-7]和苗木嫁接机构设计[8-15]两个方面。“劈接法”是树苗嫁接的一种主要方式,多用于杨木、葡萄、枣、梨、苹果、柿子等树苗,其手工操作流程为:①将穗木削成正双面楔形切口;②砧木劈成一字形劈口;③将穗木插入砧木劈口,使砧木横断面形成层和穗木楔形切削面形成层紧密接合,若松动,可以捆绑。本文以杨树苗劈接嫁接为研究对象,模拟手工嫁接作业,研制出一种树苗嫁接机器人样机。
1 树苗劈接嫁接机器人机械系统设计
1.1 机械系统总体设计
树苗劈接嫁接机器人的工作流程为:砧木、穗木供苗→砧木、穗木夹持→穗木、砧木切削→穗木、砧木接合→嫁接苗排出,其中,砧木、穗木供苗与嫁接苗排出为人工操作。根据以上流程,确定树苗嫁接机器人的工位为:砧木、穗木取苗工位→穗木切削工位→砧木切削工位→穗木砧木接合工位→嫁接苗排出工位。各工位的时间分配为

其中,tz为单次循环总时间;tg为砧木、穗木供苗时间;ty为砧木、穗木在各工位间移动时间;tq为穗木、砧木切削时间;tj为穗木、砧木结合时间;tp为嫁接苗排出时间。
树苗嫁接机器人基于虚拟样机理念,利用三维设计软件Pro/E进行虚拟建模与装配,并进行虚拟样机仿真,然后加工装配出物理样机。树苗嫁接机器人机械系统包括:机架、穗木夹持机械手、穗木切削机构、砧木夹持机械手和砧木切削机构。
1.2 砧木、穗木夹持机械手设计
1.2.1 砧木夹持机械手
砧木夹持机械手用于在砧木供苗工位实现砧木苗的夹持,并能够搬运砧木苗到砧木切削工位,待砧木、穗木接合后,运动到嫁接苗排出工位。为此,本文采用伺服电机加丝杠实现砧木夹持机械手的运动,采用直动电磁铁实现砧木机械手的夹持,设计出的砧木夹持机械手见图1。
1.2.2 穗木夹持机械手
穗木夹持机械用于在穗木供苗位置实现穗木夹持,搬运穗木苗至穗木切削工位,搬运切削好的穗木苗至砧木切削工位,插入完成一字切削的砧木劈口,实现砧木穗木的接合。穗木机械手实现两个方向的运动:一是水平搬运;二是垂直插入运动。为此,采用驱动电机加水平丝杠实现水平运动,采用驱动电机加垂直丝杠实现垂直运动,采用直动电磁铁实现穗木夹持,设计出的穗木夹持机械手如图2所示。
1.3 砧木、穗木切削机构设计
1.3.1 砧木切削机构
砧木切削机构用于砧木的一字形切削,切削力采用伺服电机加丝杠实现,可以根据砧木的直径改变切削深度,设计出的砧木切削机构如图3所示。

图1 砧木夹持机械手结构图
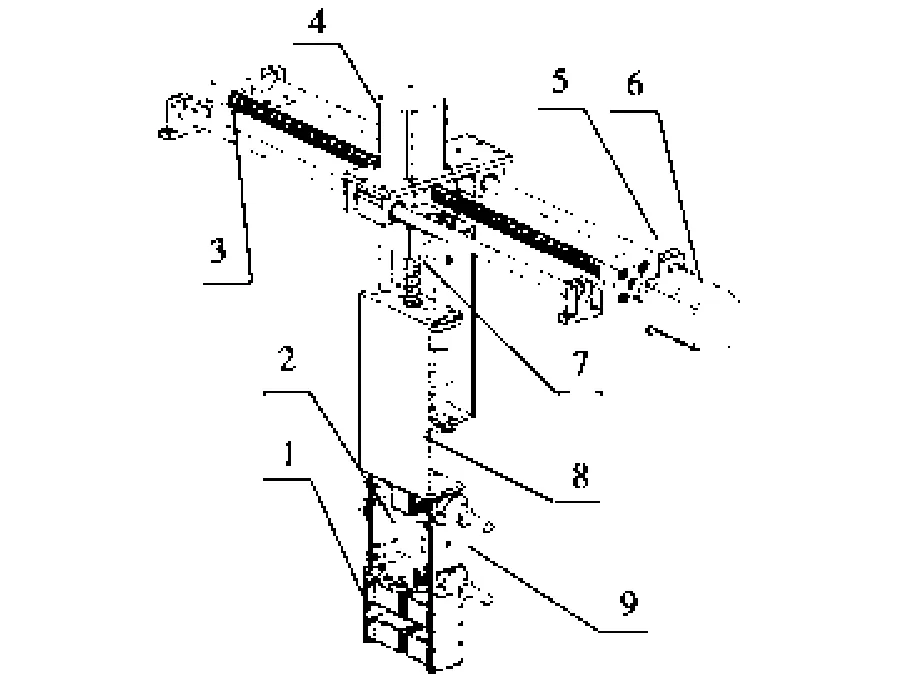
图2 穗木夹持机械手结构图
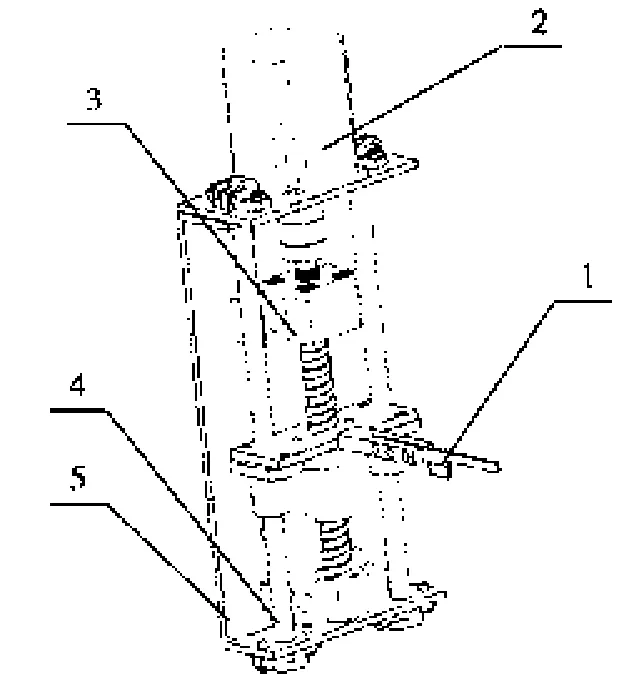
图3 砧木切削机构结构图
1.3.2 穗木切削机构
穗木切削机构用于穗木的双面正楔形切削,该机构由结构相同、左右对称安装的穗木切削组件和穗木切削调位组件组成。穗木切削组件采用两个直动电磁铁作为切削驱动力,实现穗木双面楔形切削。穗木切削调位组件用于调整穗木切刀相对于穗木的切角,实现穗木切削装置的微调。设计的穗木切削机构见图4。
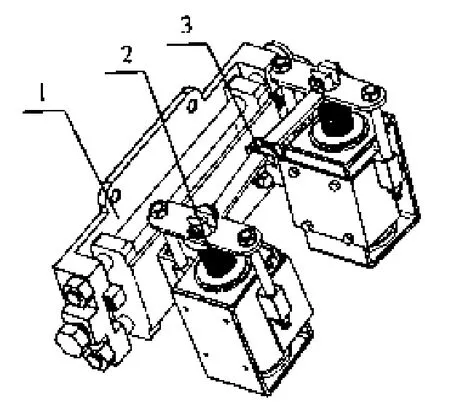
图4 穗木切削机构结构图
2 树苗嫁接机器人嫁接试验
2.1 树苗嫁接机器人样机
树苗嫁接机器人各个关键机构设计完毕后,便进行机械零部件加工、制造和装配,研制出树苗嫁接机器人样机,如图5所示。
2.2 试验对象
嫁接试验用砧木为一年生通直杨树枝条,直径为20~25 mm,长度为100 mm;穗木为当年生健壮饱满带穗枝条,直径为4~6 mm,长度为100 mm。
2.3 试验结果与分析
选取砧木、穗木试样各100根,随机分为10组,采用研制的树苗嫁接机器人进行嫁接试验,试验结果见表1。砧木切削成功率为94%,失败的原因有两个:一是有些砧木不是通直,导致轴向切偏;二是砧木切削切口处存在苞节,切削力增大,砧木夹持机械手受力后不稳。穗木切削成功率为93%,穗木生长的不一致性致使穗木切削面难以呈现双面楔形。砧木、穗木嫁接的成功率为86%,由于树苗生长的不一致性,砧木和穗木的形成层难以准确的对齐,导致嫁接成功率受到影响。树苗嫁接机器人样机平均嫁接时间为20.9 s,与普通嫁接操作人员的手工嫁接作业时间近似。试验结果表明:树苗嫁接机器人样机的嫁接时间和嫁接成功率接近人工嫁接水平,待进一步改进后,作业效率能够高于人工水平。

图5 树苗嫁接机器人样机
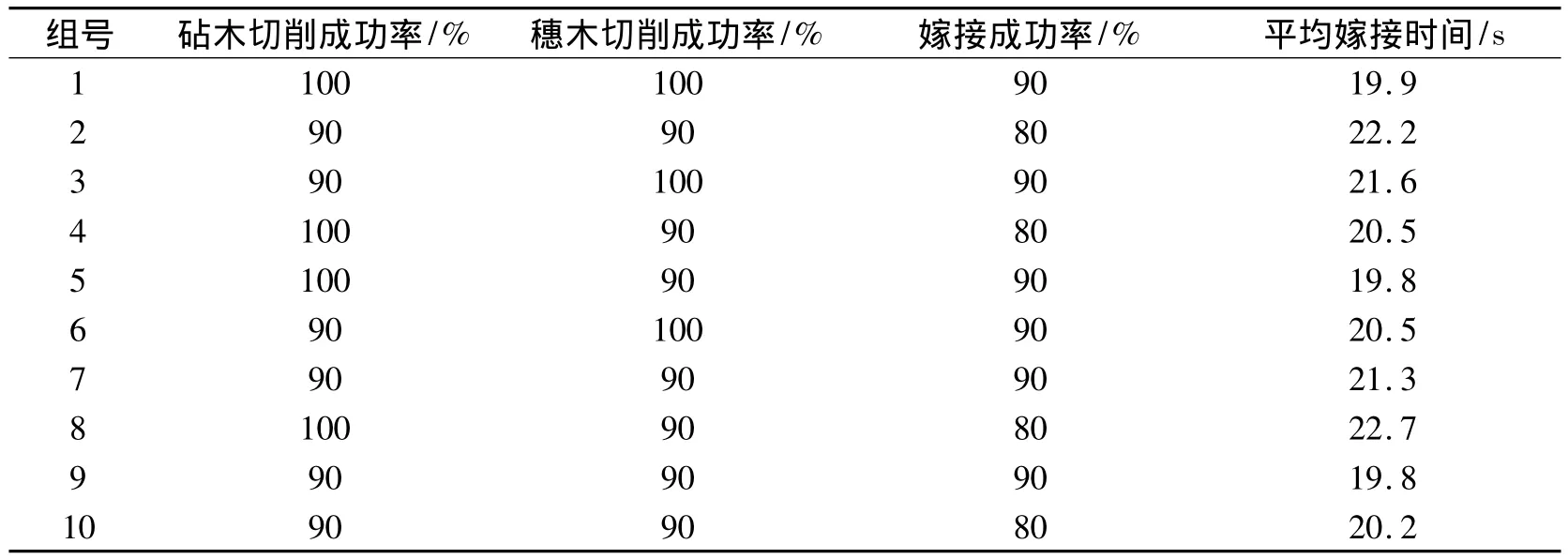
表1 嫁接试验结果
3 结论
(1)根据树苗劈接嫁接手工操作流程,设计出基于丝杠传动、电机驱动和电磁铁驱动的树苗嫁接机器人机械系统。
(2)树苗嫁接机器人样机平均嫁接时间为20.9 s,嫁接成功率为86%,接近人工嫁接水平。
[1]李继华.嫁接原理与应用[M].上海:上海科学技术出版社,1980:51-52,66,113.
[2]高新一,王玉英.林木嫁接技术图解[M].北京:金盾出版社,2009.
[3]孙群,赵栋杰,赵颖.国内外树苗自动化嫁接技术的研究现状[J].农机化研究,2010,32(8):217-220.
[4]王锋锋,刘明刚,吴晓峰,等.国内外苗木嫁接机器人研究现状及发展趋势[J].林业机械与木工设备,2011,39(1):16-18.
[5]罗军,高英武,何幸保.自动嫁接机的研究现状与展望[J].湖南农机,2010,37(2):1-2.
[6]李明,汤楚宙,谢方平,等.毛桃苗力学特性试验研究[J].农业工程学报,2005,21(3):29-33.
[7]赵燕平,张铁中,杨丽.条接条嫁接砧木苗切削阻力试验研究[J].农机化研究,2008,30(7):146-148.
[8]李明.苗木嫁接机切削机构试验研究与设计[D].长沙:湖南农业大学,2003.
[9]李明,戴思慧,汤楚宙,等.苗木嫁接机器人切削机构模拟试验[J].农业工程学报,2008,24(6):129-132.
[10]赵燕平,张铁中,王红英.树苗自动嫁接机砧木切削机构研究[J].农业工程学报,2008,24(9):79-83.
[11]李雪山,孙奎军,胡少华,等.葡萄嫁接机:中国,CN201518617U[P].2010-07-07.
[12]姜秀美.PJJ-50型葡萄嫁接机的设计[J].农业装备与车辆工程,2011(11):7-9.
[13]王锋锋,刘明刚,吴晓峰,等.油茶嫁接机器人的研究设计[J].林业机械与木工设备,2011,39(4):36-39.
[14]王锋锋.劈接式油茶苗木嫁接机的研究[D].北京:中国林业科学研究院,2011.
[15]徐丽明.一种桑树苗袋式自动嫁接装置及嫁接方法:中国,CN201010129635.3[P].2010-03-19.
