PZT压电式微传感器的结构优化
2013-06-01田开云谭晓兰
田开云,谭晓兰
(北方工业大学机电工程学院,北京 100041)
0 引言
目前,MEMS压力传感器[1]应用比较多的有压阻式压力传感器和电容式压力传感器,应用压电效应制成的压电式微传感器[2]由于不仅可以作为传感器,在输入电荷产生电场的情况下,还可以作为制动器,因此,压电式微传感器具有广阔的应用前景[3]。
目前对于压电悬臂梁式微传感器[4-5]的优化主要集中在假设形状已经确定的条件下(一般为矩形),通过改变复合悬臂梁的某一尺寸参数为变量,其他保持不变的情况下,得出该尺寸参数对输出电压的影响。但由于在优化分析前已固定复合悬臂梁的结构为矩形线性结构,因此从理论上来说并不能保证所得到结果为最优结果。
本文试图在已经给定压电材料用量的情况下,通过建立数学模型,并用遗传算法对模型进行求解,得出压电悬臂梁的最佳长度l,和偏转角度α,在不改变各层厚度的情况下,得出最大的感应电荷,从而保证在力F 一定的情况下,能够提高传感器的灵敏度。
1 压电悬臂梁式微传感器的工作原理与弯曲特性仿真
1.1 工作原理
当微悬臂梁的端部受到作用力时,梁会发生弯曲形变。梁中的压电ZnO 薄膜层在受到力的作用时,由压电效应,会在z 轴方向产生极化电荷。通过上、下电极层将电荷导出并输入到电荷放大器(或电流放大器),再将电荷信号放大并转换成电压信号进行信号处理。
1.2 压电悬臂梁弯曲特性仿真
为了得到压电材料在悬臂梁结构时,自由端受力时产生的感应电荷分布,先建一个简单模型对压电悬臂梁材料的弯曲特性进行模拟仿真,如图1 所示,红色部分为底电极,上部分开间隔的各自独立的上电极,长度50 mm,厚度1 mm,在悬臂梁的末端施加100 μN 的压力后,仿真得到悬臂粱的弯曲曲线分别为图2和图3。
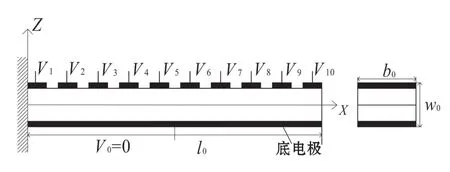
图1 压电悬臂梁仿真模型
如图2 所示的悬臂梁在固支端A 附近的应变最小,在自由端B 处的应变最大,而图3 则显示出在B处的电压最小,近乎为0,反而在固支端A附近的电压达到最大值。
因此,如果把悬臂梁做成矩形式的线性结构,并不能有效改善提高传感器的灵敏度[6]。因此必须结合形状优化来综合提高传感器的灵敏度。

图2 悬臂粱的弯曲曲线

图3 悬臂梁电压分布曲线
2 变截面式压电微传感器的建模与优化
2.1 建模
由1.2 对压电微悬臂梁的弯曲特性仿真可知,悬臂梁根部靠近固定装置的一侧,产生的感应电荷最多,而在施加力的自由端一侧产生的感应电荷极少,末端甚至几乎为0,又由于传感器的灵敏度为:

由公式(1)可知,在自由端载荷F 不变的情况下,压电悬臂梁产生的感应电荷越多,则灵敏度越大。
本文的创新点在于:设计了一般情况下的变截面复合悬臂梁,并建立优化模型,如图4所示。

图4 变截面复合梁
考虑到悬臂梁受力时振动的稳定性,把变截面的传感器模型设置为对称结构。对于任意截面悬臂梁(截面如图5所示),控制压电材料的总面积s,通过协调梯形截面参数b0、b1、l 不变,使得压电悬臂梁在常力F 作用下,产生的电荷最大,从而提高传感器的灵敏度。引入偏转角α。

图5 变截面梁的俯视图
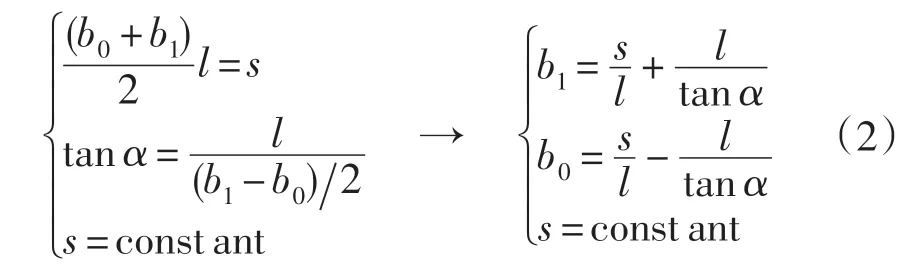
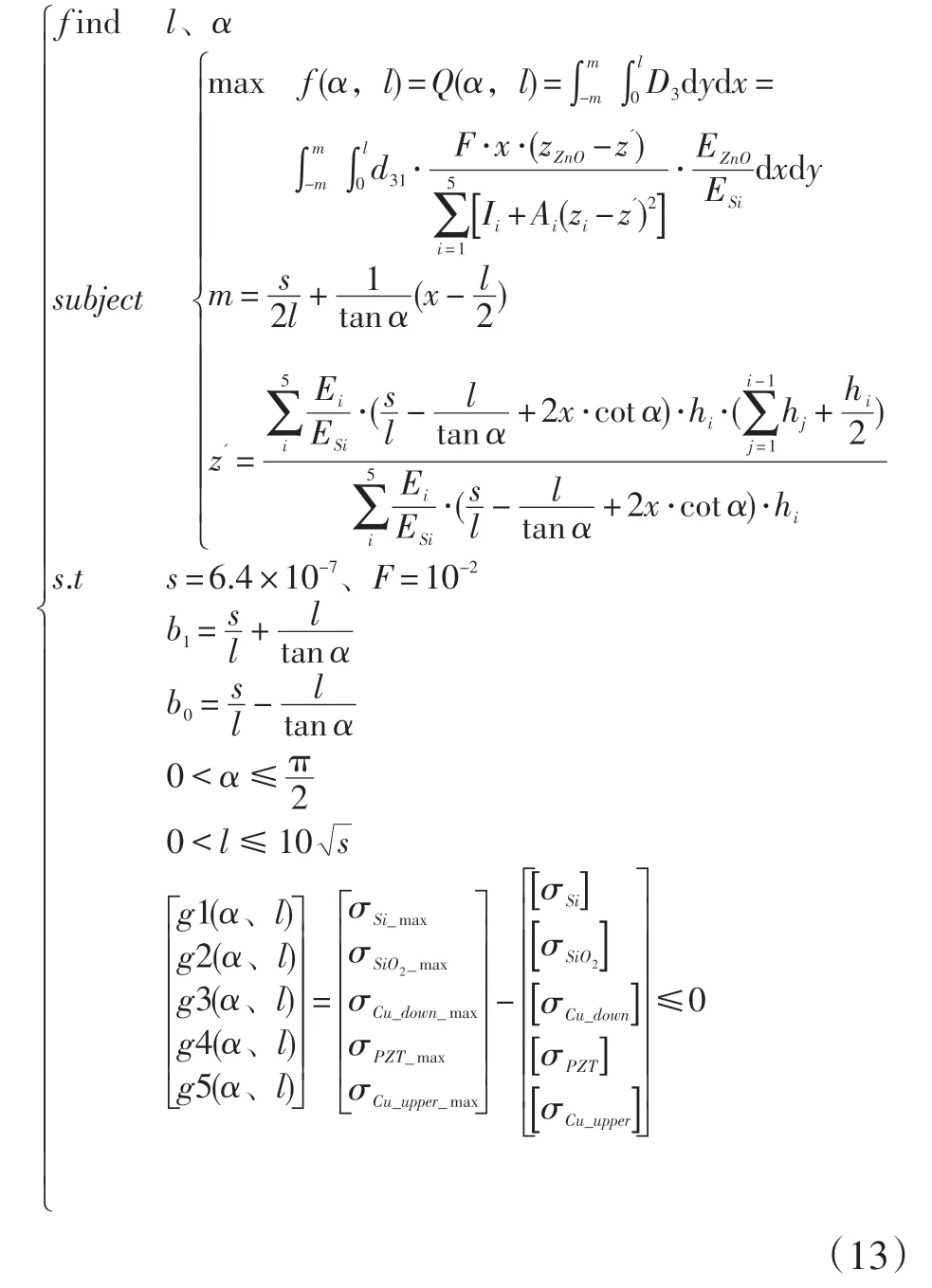
表1 为要进行悬臂梁结构形状优化的初始模型参数,而要进行的优化即为在其它条件不变的情况下,求出最佳的悬臂梁长度l,和角度α,使得在力F 的作用下,输出电荷Q 最大。建立的优化模型如下:


表1 压电悬臂梁模型初始参数
2.1.1 目标函数:压电悬臂梁力—电荷转化关系的推导
对于PZT压电材料,其压电系数dij用矩阵表示,压电方程为:

根据压电悬臂梁的结构,图4 所示,梁的z轴方向承受作用力,对于薄膜符合材料层,可以认为梁发生纯弯曲变形,忽略σ2、σ3、τ4、τ5、τ6。
公式(4)化简为:

由公式(5)可知,只要计算出复合材料层中PZT 层中的应力分布σ1,对公式(5)两边积分,即可求出在力F 作用下,传感器产生的感应电荷Q。故需先求出σ1。
在坐标为x 处,变截面悬臂梁在此处的宽度为bx,参考图5变截面梁的俯视图,可得出:

同时,在坐标x 处,距离中性轴的的纵向坐标为z 时,由弯曲产生的应力σz:

式(7)中:E 为梁的弹性模量;ρ 为梁弯曲后的曲率半径;z 为距中性面的Z 向坐标;M(x)为距离原点x 处的力矩;Iy为此截面相对于中性轴的惯性矩。
因此,只要求出中性面的位置z0和截面相对于中性轴的惯性矩Iy,就可把公式(7)代入(4)求出截面内的感应电荷密度,最后通过积分即可求得在力F 作用下产生的电荷量Q。
根据等效截面法,把复合悬臂层各层的厚度等效为Si 的厚度,得出中性层距复合梁底层的高度为z':

式(8)中hi为悬臂梁各层的厚度,复合梁等效成si 梁后的等效二次惯性矩I':

将公式(6)、(8)、(9)带入公式(7),可得复合悬臂梁受力F 的作用时,离原点x 处,PZT 压电层受到的平均应力σx,为:

将公式(10)代入压电方程(5),并对整个具有上、下电极的压电层进行积分,可得复合微悬臂梁受力F 的作用时,产生的电荷总量Q:

式(1)中:m 为引入的中间变量。
2.1.2 求解约束条件:
由于悬臂梁是纯弯曲[7],当在自由端施加压力F 后,在坐标x 处产生弯矩M(x),在截面处的应力分布如图6 所示,任意点的正应力与该点到中性轴的距离成正比,即沿高度方向,正应力按直线规律变化。
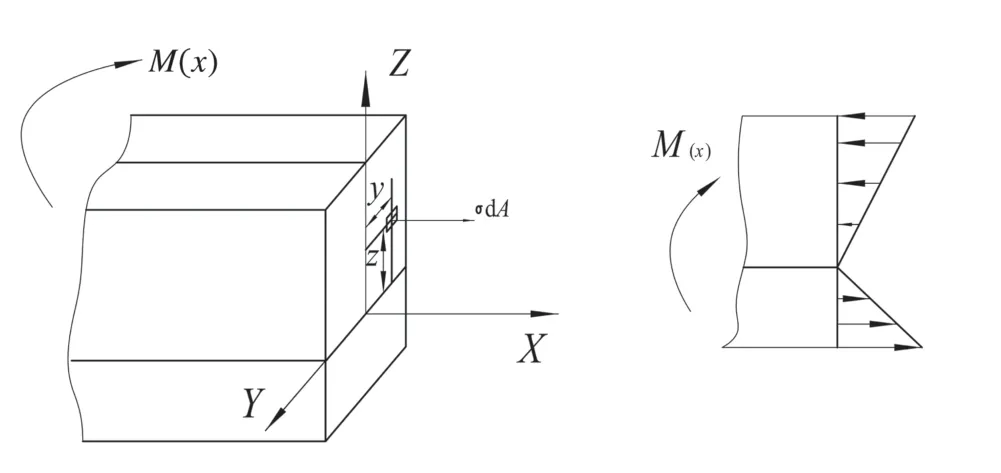
图6 悬臂梁弯曲时的应力分布
设各层的正应力最大为σimax(其中i max 代表是第i 层的最大应力,从底部算起,分别为第1层,第2 层……),由公式(6)可知,在悬臂梁固定端,产生的弯矩最大,同理根据图7,在每一层薄膜最靠近悬臂梁上下端面时,产生的轴向应力最大,因此,只需校核此处的应力是否满足许用应力条件。

把公式(11)、(12)代入初始的优化模型(3)得:
2.2 模型求解
本模型属于多变量非线性规划约束问题极大值求解,应用自适应惩罚函数法[8],把约束问题转化为非约束问题后,应用遗传算法求解。

图7 遗传算法流程
2.2.1 构造惩罚函数
由优化模型(17)构造辅助函数为:

把公式中的后一项作为惩罚函数p(α、l)

其中Ki(i=1、2……5)为惩罚因子,通常取较大的值,因此模型(13)可转化为如下问题:

为了较好的解决惩罚因子的确定问题,将惩罚因子选取为自变量(α、l)的函数,并且为了加快收敛速度,借鉴了“多级惩罚”的思想[8]——对违反约束大的段给予较大的惩罚而违反约束小的段给予较小的惩罚,按下式构造惩罚函数:
辅助函数(18)变形的:

2.2.2 基于惩罚函数法的遗传算法
(1)参数设置
群体大小M=80,终止进化代数G=100,交叉概率pc=0.8,变异概率pm=0.1。
(2)编码
先确定染色体二进制编码串的长度,在matlab编程中,调用如下函数求解各变量的字符串长度:

代入公式(20),得:L=L_α+L_l=8+10=18。
(3)解码

(4)选择和遗传
①选择算子:轮盘选择算子;②交叉算子:单点交叉;③变异算子:基本位变异。
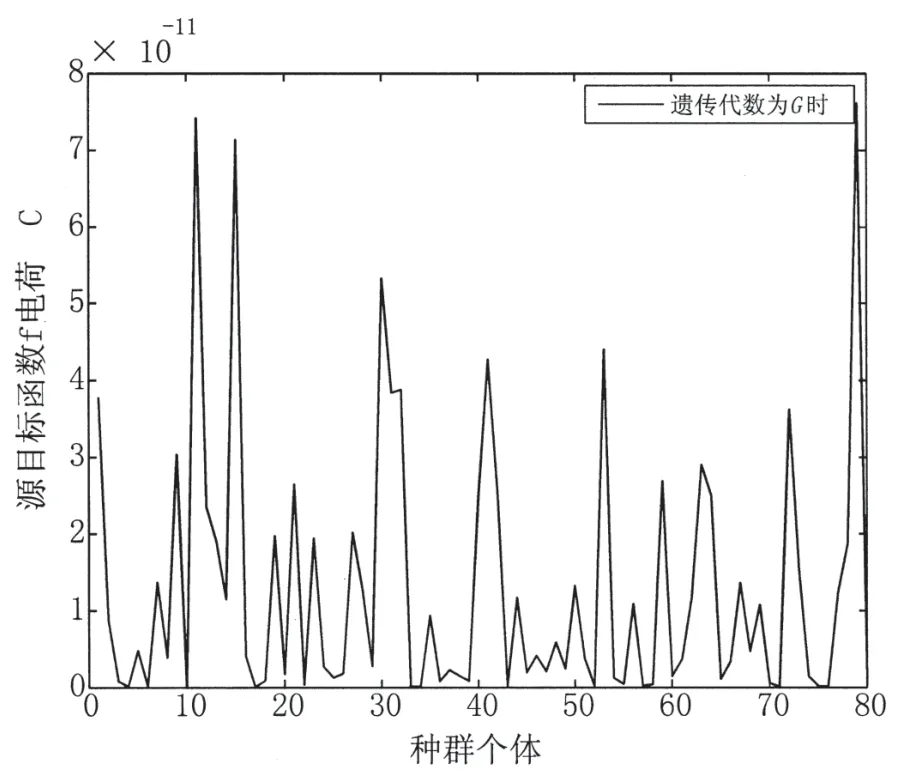
图8 最大遗传代数时,目标函数值得分布图
3 结论
由遗传算法[9]的优化结果可知,当l=1.13×10-3m,α=1.206,得到的感应电荷Q1=7.485×10-11C,而在相同的压电材料s 下,初始模型l0=1.6×10-3m,α0=π 2 时,初始感应电荷Q0=6.693 7×10-11C,而由公式(1)得:传感器的灵敏度与感应电荷成正比,即优化后的传感器灵敏度提高了11.82%。
[1]田裕鹏,姚恩涛,李开宇.传感器原理[M].北京:科学出版社,2007.
[2]章吉良,周勇,戴旭涵.微传感器[M].上海:上海交通大学出版社,2005.
[3]格雷戈里T.A.科瓦奇.张文栋,董海峰,熊继军,等译.传感器与微执行器全书[M].北京:科学出版社,2003.
[4]张奇,任权,靳鹏云,等.基于微悬臂梁的传感技术研究[J].现代科学仪器,2010(2):180-183.
[5]梁明富,赵翔.基于MEMS 技术硅微悬臂梁制作工艺研究[J].新技术新工艺,2009(4):27-30.
[6]黄树森,李昕欣,王跃林,等.MEMS 传感器性能提高相关技术研究[J].仪器与仪表,2003,(1):8-25.
[7]范存新.材料力学[M].重庆:重庆大学出版社,2011.12.
[8]陈立周.机械优化设计方法:3 版[M].北京:冶金工业出版社,2005.
[9]雷英杰,张善文,李续武,等.MATLAB 遗传算法工具箱及应用[M].西安:西安电子科技大学出版社,2005.
