基于单片微机控制的电机软启动器研制*
2013-06-01赵晋琴唐红琴姜明俊
赵晋琴,肖 杰,唐红琴,姜明俊
(1.湖南第一师范学院信息科学与工程系,湖南长沙 410205);2.重庆大学,重庆 400044);3.长沙顺特变压器厂,湖南长沙 410014)
0 前言
电动机是工业、农业和交通运输的重要设备,随着社会生产的日益发展,电动机的应用越来越广泛。三相交流鼠笼式感应电动机因其结构简单、运行可靠和价格便宜而被广泛采用,据统计,其耗电量约占全国发电量的30%以上。然而,三相交流感应电动机是一种反电势负载,在启动开始时反电势为零,若直接启动,将会产生很大的冲击电流并造成多种危害。特别是当电动机容量较大时,冲击电流会对电网及其负载造成干扰,严重时将会危害电网的安全运行;启动电流过大还会使电动机本身受到过大电磁力的冲击,造成绕组过热的危险。同时,由于启动应力较大,使得负载设备的使用寿命降低。为了克服三相感应电动机直接启动造成的危害,人们采用了各种降压启动技术,而单片机控制的电子式软启动器是目前最先进、最流行的三相感应电动机软启动控制装置,采用该装置,不仅能减小电机启动时对电网的冲击,而且能达到节能的目的[1-2]。
本文结合鼠笼电机本身具有的特性,研制了一款低成本、大功率的智能软启动器,采用MCS-51 系列单片机控制晶闸管三相交流调压电路[3],由三相交流调压电路给电机供电,调节输出电压幅值以控制电机,从而降低电机的启动电流,从根本上解决了传统的降压启动设备的诸多弊端,满足用户要求。
1 软启动器的工作原理及结构
软启动器是一种集软启动、软停车、多功能保护、节能于一体的电机控制装置。它串接于电源和被控电机之间,通过控制其内部晶闸管的导通角来调整电机的输入电压,使电压从零开始按预置的实际工艺曲线逐步上升,待电机达到额定转速时,启动过程结束,达到电机平滑启动的目的[4]。它不仅能根据电机的负载特性来调整其启动过程中的参数,而且能实现启动过程的无冲击电流,对电机具有一定的保护作用。软启动器同时还提供软停车功能,软停车与软启动过程正好相反,控制电机的输入电压逐渐降低,使转速从额定转速逐渐降低到零,避免了电机停车引起的转矩冲击,保护电机。基于单片微机控制的电机软启动器组成框图如图1 所示。以89C52 单片机为核心组成晶闸管触发角α控制调压电路输出电压,而α角的变化规律由单片机根据用户预置并符合实际的工艺曲线,再根据实际启动/停车过程中的电流和电动机运转状况予以微调[5-6],主要完成鼠笼电动机的自动软启动/软停车功能,也可手动完成电动机的软启动/软停车。自动/手动、软启动/软停车功能的选择由单片机根据拨码开关的预置位置自动识别,控制器根据识别结果进入相应的控制程序。在自动功能中,控制过程根据用户预选的工艺曲线或限流值自动完成;在手动功能中,控制过程由工作人员以点动的方式人工完成。

图1 电机软启动器组成框图
2 硬件电路设计
2.1 主电路设计
电机软启动器主电路如图2 所示,采用带旁路的晶闸管三相交流调压电路,由三组反并联的双晶闸管支路组成,以实现对三相交流电源进行斩波调压及旁路,调节输出电压幅值供给电动机,以满足软启动/软停车的工艺要求。
2.2 控制电路设计

图2 电机软启动器主电路
采用MCS-51系列单片机89C52扩展系统作为软启动器的微控制器单元。扩展了键盘电路、数码管显示电路、指示灯等人机接口电路[3],如图3所示,以便于操作人员现场进行参数修改、工作模式选择等工作。
(1)相电压检测电路
三相输入电压uAN、uBN、uCN分别经电压过零比较器变为单极性方波Uan、Ubn、Ucn,经光耦隔离后输入单片机系统,作为微控制器分配触发脉冲的主同步信号[2],也作为微控制器进行相序检测、缺相判断的输入信号。
(2)晶闸管压降检测电路
三组晶闸管两端的压降信号经整流后再与电压过零比较器比较,产生的方波信号经光耦隔离后输入单片机系统,作为晶闸管损坏判断和辅助同步信号。若微控制器发出脉冲后较长时间晶闸管不导通或关闭脉冲后较长时间晶闸管不关断,则断定为晶闸管损坏或驱动电路出现故障;微控制器在分配脉冲时,要等对应晶闸管关断后才按序触发下一脉冲,以避免占空比丢失引起电机振荡。
(3)线电流检测电路
用三只电流互感器分别检测出三线线电流,经A/D 变换、光耦隔离后送入微控制器,作为限流调节、过流保护的输入信号。
(4)驱动电路
微控制器发出的六个脉冲信号经驱动电路、隔离变压器后分别控制相应的六只晶闸管。
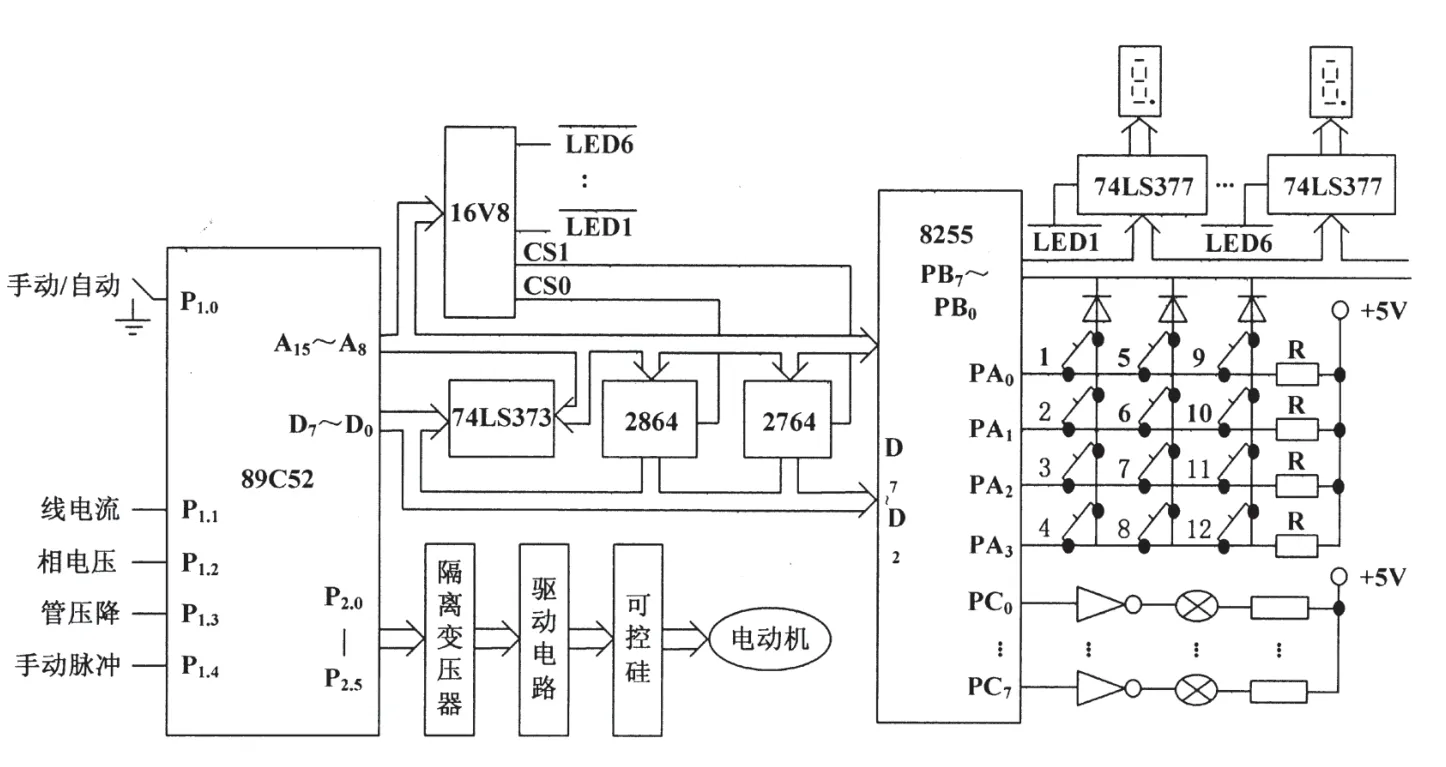
图3 单片机控制电路
3 软件程序设计
3.1 软件流程
软件程序主要完成初始化、故障诊断、参数设置、读工艺曲线、参数计算、输出电压调节功能及旁路切换等功能。主程序流程图如图4所示。

图4 主程序流程图
3.2 程序算法
3.2.1 脉冲分配
根据三相市电固定时序,微控制器依次发六个彼此间隔60 度的触发脉冲给相应的六个晶闸管,为可靠形成电流回路,在发某个脉冲时,同时向前补发一个脉冲。各触发脉冲时序与主同步信号的关系如图5 所示,序号与时序一致,括号内为补发的脉冲,同步信号上的箭头处表示主同步点,实发触发脉冲时刻为自同步点滞后触发角α处。

图5 脉冲分配与同步信号
3.2.2 工艺曲线
工艺曲线用来描述对电机运行过程的要求,本软启动器采用调压方式对电机执行软启动/软停车,因而工艺曲线表现为对软启动器输出电压的要求上,图6所示为工艺曲线常见形式之一。
软启动器的输出电压受触发角α控制,为了控制的快速方便,通过预先估算,将用输出电压表示的工艺曲线转换为用触发角α表示的工艺曲线,如图7 所示。每一软启动器配有多种可供选择的工艺曲线,各工艺曲线以数据序列的形式存储于微控制器的ROM中,存储内容包括:总段数n、每段的起始α角和终值α角、每段的变化率ρ、每段的时间数Δt、触发角α的微调量σ。例如图7所示工艺曲线,其在ROM 中的数据结构为:[4;α0,α1,ρ1,t1,σ1;α1,α2,ρ2,t2-t1,σ2;α2,α3,ρ3,t3-t2,σ3;α3,α4,ρ4,t4-t3,σ4]。选择适当的基本时间单位,如以20 ms为基本单位,以方便于运行时对触发角α进行自动调整和校正。

图6 工艺曲线示意图
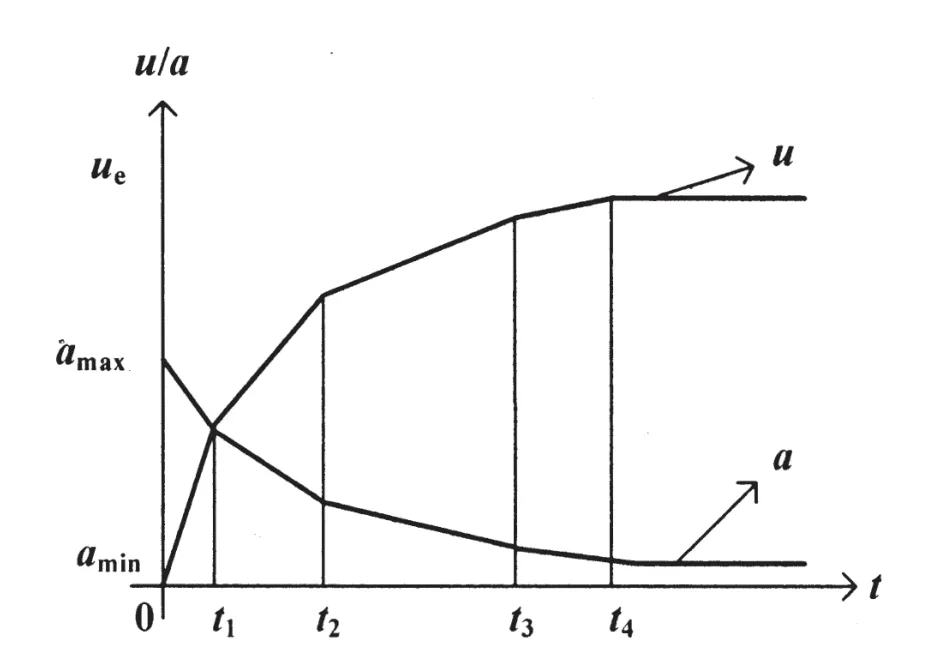
图7 软启动工艺曲线及其转换
3.2.3 α调节规律
每五个基本时间单位后,根据预选的工艺曲线对α角调整一次,给α增加一个改变量ρ(软停车时减小一个改变量ρ),若输出电压和输出电压变化率均没有达到要求,且线电流没有超过限流阈值,再给α角增加一个微调量σ;若输出电压和输出电压变化率均超过要求,或线电流超过限流阈值,则给α角减小一个微调量σ。在软件中,对α角予以边界限定,最大α角由软件内定(如最大推荐值为110°),以最大可能地加速起动;最小α角由软件根据实际工况自适应调整,为电源电压(主同步信号)过零点到对应晶闸管关断点的值,目的是在自然换流、感性负载条件下,保证在发下一组脉冲时,该自然关断的晶闸管已可靠关断,从而避免因占空比丢失引起电机振荡。
4 应用效果
用Simnon 软件对该调压软启动器进行仿真,得到图8所示的波形。从图8中可以看出,调压器输出电压波形为有缺口的“非圆滑”波形,但因电机为感性负载,其电流波形依然为“圆滑”波形。
某单位一水泵房有一台380 V,额定功率为75 kW,额定电流为140 A的交流电动机负责水塔供水,由于启动和停泵时经常产生水锤效应导致水泵的叶轮、管道损坏而停水,启动电机经常出现周围电网跳闸。经技术改造,水泵电机启动由原来的直接启动改造为单片机控制的电机软启动器,通过对软启动器的各项参数设置使电机获得了较好的启动性能,起始电压为:60%Ue,限流倍数为:3.5Ie,升压时间为:3 s。在水泵电机停机时同样通过对软启动器各项参数设置使得水泵电机获得较好的制动性能,取得了很好的保护效果,同时也保证了该单位正常供水和周围电网的正常运行,节约了设备维修经费,保护了设备和电网,可靠性高,性能完善,完全满足用户要求。

图8 仿真波形
5 结束语
本软启动器的研制实现了电机软启动、软停车和多种综合故障保护。三相交流鼠笼式电机不需要调速的任何场所都可以应用该软启动器,特别适用于各种泵类负载、风机类负载,需要软启动和软停车的场合。本软启动器的主要优点有:(1)控制算法简单,实现容易,不必熟悉电机复杂的数学模型;(2)晶闸管调压电路采用的是自然换流开关器件,在带电机负载时,控制系统中存在寄生的电流正反馈信号,若该信号幅值超过一定值,会引起电机的振荡,只须在软件中加入电流正反馈信号幅值抑制措施;(3)工艺曲线可灵活配置,满足各类电机软启动/软停车工况要求;(4)以较低的成本很好地解决了电动机起动时对电网和机械设备的冲击,同时还具备软停车、多种故障保护、节能、通讯等功能;(5)与国外同类产品比较,具有较大的经济性和实用性,可广泛应用于冶金、石化、市政、制造等行业,也必将成为三相鼠笼式电机智能启动的主流设备。
[1]Hefner R A.Analytical modeling of device-circuit interaction for power IGBT[J].IEEE Trans,1991,6(2):208-219.
[2]Blaabjerg F,Pedersen J K,Rise S,et al.Can soft starters help save energy [J].IEEE Industry Magazine,1997,9(10):56-66.
[3]何立民.MCS251 系列单片机应用系统设计:系统配置与接口技术[M].北京:北京航空航天大学出版社,1990.
[4]魏子良,郭学庆,张庆范.基于负载率的异步机经济运行的研究[J].控制工程,2003,10(5):474-477.
[5]李新兵,张继勇,薛半进.基于改进控制器的异步电动机直接转矩控制[J].机电工程,2006,23(12):24-27.
[6]吴俊,邱建琪,史涔溦,等.基于FPGH 的异步电动机变频调速系统[J].机电工程,2012(8):941-944.
