链式淡水鱼加工前处理装置的研制
2013-05-02彭三河
彭三河 徐 武
PENG San-heXU Wu
(长江大学机械工程学院,湖北 荆州 434023)
(College ofMechanical Engineering Yangtze University,Jingzhou,Hubei434023,China)
全球水产品养殖产量主要来源于中国,其年产量达到4 782.96万t,占全球养殖总产量的60.58%[1]。然而,由于包括前处理装备在内的诸多因素的制约,淡水鱼仍以鲜活即时消费为主,加工量甚少。提高鱼产品附加值是渔业发展的方向,然而淡水鱼的打鳞、剖切、去内脏等前处理问题已成为鱼类深加工的瓶颈[2~6]。据调查和信息[7~9]检索,鱼加工前处理设备设计制造及使用程度较高的国家和地区有日本、挪威、丹麦、瑞典、美国及中国台湾;产品多以单一工序处理为主,如除鳞机、切头机、剖鱼机等,少量产品具有几个工序的处理能力,如括鱼鳞剖鱼腹机等;一般体积较大,价格昂贵,动辄几十万或上百万,绝大部分产品只能加工单一鱼种或某一尺寸规格范围的鱼,适应能力不够。目前,中国大多数鱼加工企业仍然使用传统的手工劳动方式进行前处理作业,劳动强度大,工作效率低,工伤事故多,且产品质量难以保证。近几年,中国一些相关高校及研究机构对鱼加工前处理设备展开了积极的研究,在鱼加工单项处理上,已有一些产品投放市场,如去鳞机、切头机、剖鱼机、鱼刺分离机等,但多工序联合鱼加工前处理装置的设计研制力度不够,鱼加工企业前处理设备使用率很低,影响中国渔业的深度发展[10,11]。经过几年的试验研究,设计了一种链式鱼加工前处理装置,通过样机生产试验,一台此类设备基本上能够满足一个中型鱼加工企业的前处理工作需要。
1 链式鱼加工前处理装置的设计方案
1.1 设计要求
链式鱼加工前处理装置采取链条输送、鱼盒夹鱼、顺次完成剖切鱼肚去除内脏等任务的加工方式,链盒式的固鱼输送要求能快速可靠夹鱼,鱼体前行方向要稳定,抖动小。刨切要求不能切破内脏,不伤及内腔,掏挖干净,保证鱼的味觉新鲜。同时还要考虑安全、环保及节能等要求。
1.2 前处理装置总体结构设计
链式鱼加工预处理装置主要由机架、链条输送机构、剖腹机构、撑腹机构、内脏剔除机构及卸鱼部分等组成,其结构三维示意图见图1。
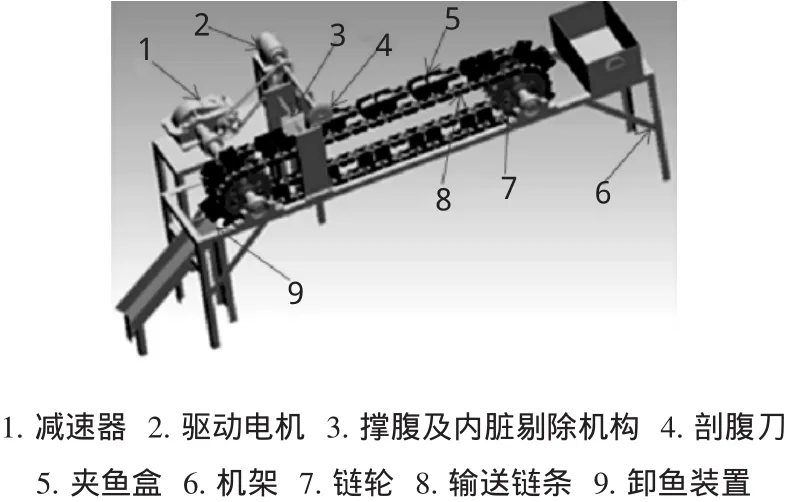
图1 鱼加工前处理装置三维结构示意图Figure 1 Therr-dimensional structure diagram of the fish processing pretreatment device
机架是剖鱼机各零部件的支撑体;链条输送机构由输送主动链轮、输送链条、夹鱼盒、输送从动链轮等组成,鱼体在夹鱼盒中由输送链条带动完成鱼体的输送;剖腹机构由驱动电机、剖腹刀盘组成,作用是剖开鱼腹;撑腹装置将剖切的鱼腹撑开;内脏剔除机构设置有类似人手的掏挖铲,用于剔除内脏;出料部分由一卸鱼滑槽组成,完成处理后鱼体的收集。
1.3 前处理装置加工流程和工作原理
1.3.1 加工流程
装置启动→人工装鱼→剖腹刀剖鱼腹→撑腹板撑鱼腹→剔除铲掏内脏
1.3.2 工作原理 工作时,人工将待处理鱼体按照尾部朝前、鱼腹朝上的方式依次放入夹鱼盒,输送链条带动夹鱼盒前进,夹鱼盒运行至旋转的剖腹刀下方时,夹鱼盒中的鱼体被高速旋转的刀盘从尾部至头部剖开,接着撑腹板将鱼腹撑开,掏挖铲将内脏剔除,鱼体行至换向区域,由于夹鱼的两鱼盒有相对空间位置改变,加上鱼盒朝下,鱼体脱离鱼盒进入卸鱼槽,完成鱼加工前处理工作。
2 前处理装置主要工作部件的结构设计
2.1 输送链的选型与改造
根据主要加工鱼类的体长范围、鱼盒安装及运动空间限制等要求,选用40A(GB/T 1243——1997)的滚子链作为输送链,主要参数:节距p=63.5 mm,滚子直径d1max=39.68 mm,内链节内宽b1min=37.85mm,销轴直径b2max=19.85mm,内链板高度h2max=60.33mm。
为了便于鱼盒与链条的安装连接,对链条进行相应的改进设计,将滚子链一侧的部分外链板重新加高设计,以下简称异形链板,异形链板用于安装鱼盒。异形链板是夹鱼盒主要零件之一,是人手能接触到的部分,为防止伤到人手,异形链板外侧边应为圆角,见图2。
2.2 鱼盒结构设计
由于加工时鱼体要承受剖刀及掏挖铲的工作力,所以必须要把鱼体夹紧才能保证加工的准确进行,单个鱼盒结构见图3。
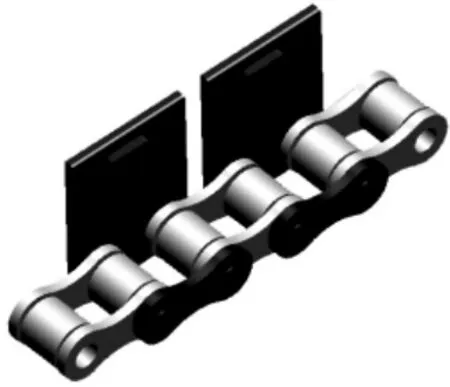
图2 改型输送链结构示意图Figure2 Structurediagram of themodified conveyor chains

图3 鱼盒结构示意图Figure3 Structure diagram of the fish box
如图3所示,鱼盒是由两块仿形夹鱼板、压缩弹簧和U型盒构成,弹簧是用来联结夹鱼板和U型盒的,弹簧与夹鱼板和U型盒壁采用焊接方式[12,13]。
鱼盒安装于输送链上,U型盒的长度与滚子链上的异形链板相等,由于所选的滚子链为40A,其节距为P=63.5 mm,1个鱼盒的长度和1个异形链板的长度相等,而主要加工鱼体长平均约200mm,故需要采用2个鱼盒装夹1条鱼,2个鱼盒之间相隔1个链节距,故2个鱼盒的总长度大于1个节距(3×P=190.5mm),这样足够装夹一条鱼,见图4。
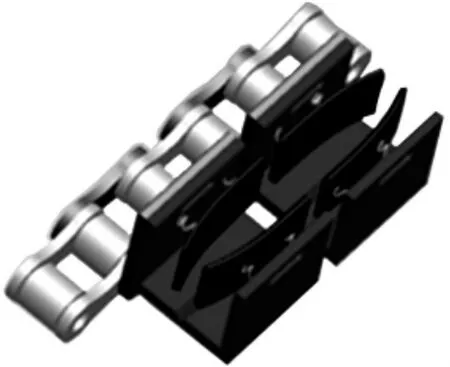
图4 两鱼盒布置结构示意图Figure4 Structure diagram of the two fish box arrangement
2.3 鱼盒与输送链的联结设计
为了保持鱼盒的平衡,采用两条滚子链传动,鱼盒两边的盒壁分别与两条滚子链的异形链板联结。鱼盒与异形链板之间采用螺栓联结。由于加工的鱼体大小不同,鱼体长度不一样,故需要改变两个鱼盒的相对位置,基于此,在鱼盒壁和异形链板上都加工有滑槽,这样就可以根据被加工鱼体大小调节鱼盒在传动链上的纵向位置。在加工之前应将鱼按大小分类,按同一规格调节两个鱼盒相对位置然后分批加工。
考虑到人手放鱼的速度和链条传动的速度差异,在传动链上每隔3个链节装2个鱼盒,这样有利于掏出的内脏从传动链上脱落并掉入机架下预设的盒子中,使废弃物收集再利用,而不污染环境。鱼盒与输送链联结结构见图5。
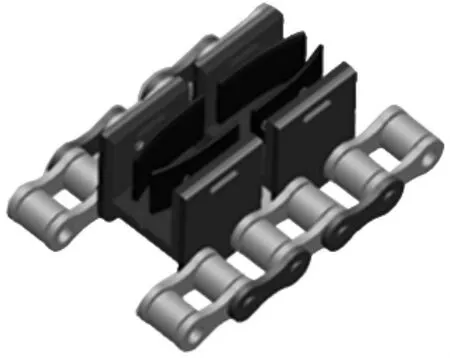
图5 鱼盒与输送链联结结构示意图Figure 5 Structure diagram of linkagebetween the fish boxand the conveyor chains
2.4 剖腹刀结构设计
剖腹刀用来切开鱼腹,鱼体倒立装夹在鱼盒内,鱼脊朝下,鱼腹朝上。剖腹刀为一圆盘切刀,圆盘切刀具有一定厚度,在圆盘切刀切开鱼腹的同时,能将鱼腹预先撑开一小部分,这样能保证撑腹板更好的进入鱼腹内将鱼腹完全撑开。圆盘切刀结构见图6。

图6 剖腹刀结构示意图Figure6 Structure diagram of the laparotomy
2.5 撑腹板结构设计
剖腹刀切开鱼腹之后,下一步工序就是要将鱼腹撑开,撑腹板就是用来撑开经剖腹之后的鱼体,撑腹板是对称设置于输送链中心线两侧的一对薄板,其前端尖锐部分焊合连接,其后端分开,形成“V”型。撑腹板结构见图7。

图7 撑腹板结构示意图Figure 7 Structure diagram of the belly-supporting plate
2.6 内脏剔除铲结构设计
经上一步工序将鱼腹撑开后,接下来就要将鱼内脏掏出来,根据人手工掏鱼内脏的特点和人手外形特征,设计出带有尖爪的人手形内脏剔除铲。
鱼腹被撑开后,由于传动链还在带动鱼体继续向前行进,所以必须在鱼腹被撑开的同时要将内脏掏出来。这里设计将内脏剔除铲安装在撑腹板内部,在传动链带动鱼体走过撑腹板的同时,内脏剔除铲将内脏刮出来。剔除铲结构见图8。

图8 剔除铲结构示意图Figure 8 Structure diagram of the removing shovel
内脏剔除铲焊接在撑腹板内,其带爪端必须要露出撑腹板下端才能刮到鱼内脏。安装内脏剔除铲时,剔除铲的爪端所处的水平线一定不能超过剖腹刀所切割到的鱼体水平线之下,否则,剔除铲会将鱼体从鱼盒中拖出来,达不到设计预想的效果。剔除铲与撑腹板安装见图9。

图9 剔除铲与撑腹板安装示意图Figure9 Installation diagram of removing shovel and the belly-supporting plate
传动链带动鱼体向前行进,当鱼体完全走过剔除铲后,剔除刀铲将鱼内脏从鱼腹中带出,当两个鱼盒完全走过撑腹板后,鱼内脏脱离鱼体,并从剔除刀上掉下来。
3 主要设计参数确定
3.1 生产率
年加工4 000 t原料鱼的中型企业,使用一台前处理机完成工作,设每条鱼平均重2 kg,每年工作200 d,单班制。

式中:
E——生产率,条/min;
T——年处理鱼量,t;
F——年均工作天数,d;
I——单班制工作时间,h;
G——鱼的平均重量,kg。
经过计算E=21条/min。
3.2 输送链的速度设计
本设计采用人工装鱼,由于链盒移动有一定的速度,加之人工作一段时间后有疲劳现象,故有漏装情况。根据试验,漏装比率在15%左右,即每分钟漏装3条鱼,故理论上应按24条/min的生产率进行设计,考虑各工序之间时间与空间的匹配关系以及人的手眼对移动物体适应关系,取两条鱼之间的间距为4个链节距,即4×63.5=254mm。

式中:
V——链条速,m/s;
S——鱼间距,m;
E0——理论生产率,条/min。
经过计算V=0.1m/s。
3.3 剖切刀直径的设计
对鱼体的结构进行研究分析,完全剖开鱼肚以便撑腹和除内脏,进入腹肚深度B处至少40 mm,如图10所示,考虑强度及安装要求,刀盘轴半径M设计为10mm,要使工作中刀盘轴径与鱼体不发生干涉,刀盘直径至少为C=2B+2M=100mm。

图10 刀盘结构尺寸示意图Figure10 Structureand size diagram of the cutterhead
3.4 撑腹板高度及开口尺寸的设计
撑腹板由两块折弯钢板焊接而成,钢板厚5mm。由于鱼体厚约40 mm,鱼体由两个夹鱼板固定,要将鱼腹撑开所以撑腹板的宽度必然要比两夹鱼板间距宽一些,这样才能将鱼夹板撑开。根据鱼盒以及夹鱼板外形尺寸,可得出撑腹板的外形尺寸。撑腹板后端开口设计为40mm。
撑腹板要进入鱼体内,鱼体高约100mm,鱼体倒立装夹在鱼盒内,鱼脊朝下鱼腹朝上,通过试验检测,鱼肚内空高度平均约50mm,撑腹板内置剔除铲,为了顺利剔除出内脏,剔除铲最低点应位于撑腹板下20 mm处,见图9,那么撑腹板深入鱼肚的高度只有30mm,考虑到撑腹板与剔除铲连接的需要,所以撑腹板的总高度设计为60mm。
4 结论
⑴针对鱼体形状及各部分尺寸特点,该装置采用鱼盒夹鱼链条输送的处理方式,能够保证鱼体固紧和较准确移动,为后面的剖切及掏挖内脏处理工作提供保证。
⑵仿人手的内脏掏挖铲,可以使内脏去得干净,又不破坏内脏和内壁。
⑶ 利用两鱼盒转向时空间位置的相对变化实现自动卸鱼。
⑷该装置各参数可调性强,适应0.5 kg到4 kg范围内中国四大家鱼的前处理加工。
(5)通过试验,该装置每小时可处理1 200尾鱼,是人工处理的50多倍,鱼处理后的感官度达到0.8以上,总体使用效果达到了设计预期。在以后工作中,还需要优化主要零部件的结构参数,以及对此装置安全性、操作性和环保方面的研究,使其臻于完善。
1 高宏全.2010年全球渔业生产情况[J].中国水产,2012(7):41.
2 邓后勤,夏延斌,危小湘,等.鱼刺分离机的机械设计分析[J].食品与机械,2007,23(1):100~103.
3 彭三河,杨焕.新型除鱼鳞机除鳞效果研究[J].食品与机械,2011,27(2):71~73.
4 彭三河,刘良忠.鱼加工预处理机的研制[J].食品与机械,2010,26(4):84~86.
5 陈奇,袁木平.淡水鱼工业化生产的探讨[J].食品与机械,2005,21(1):40~42.
6 张慜,段振华,汤坚.低值淡水鱼加工利用研究进展[J].渔业现代化,2003(3):30~31.
7 周彤,徐皓.北欧渔业装备情况考察[J].渔业现代化,2000(6):3~6.
8 贾公树.我国水产品加工技术与装备综述[J].渔业现代化,2000(2):12~14.
9 张俊杰,段蕊.浅谈淡水鱼的综合加工[J].渔业现代化,2004(1):36~38.
10 戴新明,熊善柏.湖北省淡水鱼加工与综合利用[J].渔业现代化,2004(2):42~43.
11 张慜,张骏.国内外低值淡水鱼加工与下脚料利用的研究进展[J].食品与生物技术学报,2006,25(5):115~120.
12 朱国,谭鹤群.鱼体在剖鱼机夹片中受力有限元分析[J].农业工程学报,2008(4):44~48.
13 赵正龙.鲮鱼的机械化加工[J].渔业现代化,2005(3):36~37.
