一种岸上目标跟踪算法
2013-03-08石章松董银文肖文凯
石章松,董银文,肖文凯
(海军工程大学,湖北 武汉, 430033)
一种岸上目标跟踪算法
石章松,董银文,肖文凯
(海军工程大学,湖北 武汉, 430033)
结合地面目标运动特征和地理信息之间的关系,基于图像序列配准输出的目标位置伪量测值,建立利用地理信息实现对岸上运动目标跟踪的数学描述。分析岸上不同的运动模式,设计目标运动模型集,提出基于位置滤波不确定区域与道路是否相交基础上的运动模式判别方法,给出基于运动模型动态调整的自适应滤波算法。仿真结果表明,提出的方法和算法是有效的,具有重要的应用参考价值。
电视侦察弹;数字地图;岸上目标跟踪;运动模型调整
0 引言
利用电视侦察弹所拍摄的图像序列,完成岸上运动目标的定位与跟踪,是大口径舰炮武器系统实现对岸火力支援打击的重要保证[1-2]。但由于图像传输时延、图像配准误差以及目标运动的不确定性等因素,致使其跟踪误差较大,对运动目标的精确跟踪是该系统很大的挑战。但是,被跟踪目标本身的运动特性很容易受到地理因素的影响[3]。
利用地理信息来改善跟踪性能的文献主要是围绕机载空中雷达探测跟踪系统展开研究的。其方法主要有2类:一类是地图修正[4-5],另一类是目标动态噪声方差调整[6]。文献 [3]针对机载雷达对地面目标的跟踪问题,提出了一种广义对地跟踪框架,采用过程噪声水平来表征不同的目标运动水平,同时考虑了雷达探测虚警、杂波以及多目标跟踪等诸多因素,使得滤波模型计算复杂。与雷达对地跟踪系统相比,图像序列具有优势,它没有杂波,在电视侦察弹视场内一般是对单目标进行定位跟踪,不存在多目标跟踪的数据处理环节,滤波算法相对来说简单些。
1 基于数字地图辅助修正的岸上目标跟踪算法
1.1 问题描述
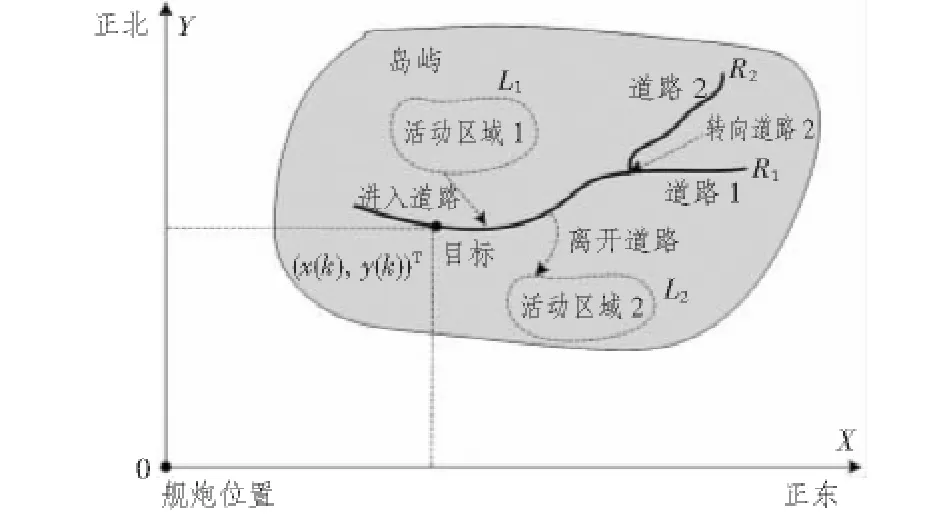
图1 岸上目标定位跟踪示意图Fig.1 Schematic view of ashore target location and tracking
利用电视侦察弹所拍摄的图像序列,完成岸上运动目标的定位与跟踪,本质上是一个混合估计问题。混合估计系统一般是直接针对每种可能的目标运动模型建立与之相应的滤波器组,按照自适应模型辨识来选择不同的滤波器,随着模型数目的增多,计算量迅速增加,而且会出现“模型过度竞争”现象[3]。
1.2 目标运动模型集设计
在对岸上目标跟踪系统中,地理信息对目标运动有一定的约束力[7],利用地理信息有可能实现模型集合的自适应精简,从而降低目标建模的不确定性,减少滤波器数目,减小计算量。
岸上目标在沿着道路运动时,趋向于匀速或者近匀速运动[7]。当岸上目标运动到道路交叉附近点时,可能会进行机动,来改变运动状态。当地面目标从道路外进入道路,或者从道路上离开时,也可能进行机动,来改变目标的运动状态。
对于一个地面目标而言,一般出现强机动是在道路交叉点附近,或者在该目标从开阔地域运动到道路上,及从道路上运动到开阔地域。在开阔地域时,目标机动性也比较大,但无法确切得知何时机动,一般假设做匀速运动。而在道路上时,目标一般是做匀速运动的,当然也有机动的可能,但出现的可能性比较小。
所以一般来说,岸上目标的运动模式有5种:①沿道路运动模式,一般做匀速运动;②离开道路进入活动区域模式,做机动运动;③从活动区域进入道路模式,做机动运动;④沿当前道路转入下一条道路模式,做圆周强机动运动;⑤在开阔区域运动模式,做匀速运动。
相对应上述运动模式,分别采取对应状态描述模型,如表1所示。针对②类和③类运动模式,主要考虑到地面目标的机动能力受限,是一个渐变的过程,选取“当前”统计状态描述模型[8]。
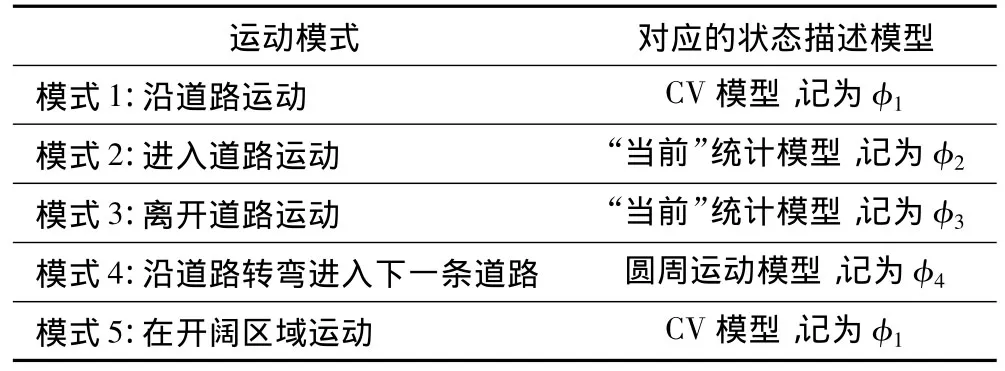
表1 不同运动模式对应的状态描述模型Tab.1 Differentmovement patterns and corresponding state descriptionmodel
1.3 运动模式判别方法
针对岸上目标,在地形限制下,利用地理信息对上述运动模式的判别,即运动模型的自适应辨识,首选应该判断出目标是否在道路上。
目前,文献[4]提出了量测不确定区域判别法,文献[6]提出了预测不确定区域判别法。在实际跟踪系统中要确定所使用的量测,就是电视侦察弹图像配准后输出的目标位置估计,没有杂波。从理论上看,位置的滤波值比预测值精度要高。本文选择位置滤波不确定区域判别法来判断目标是否在道路上。
位置滤波不确定区域判别法所定义的不确定区域为
为位置滤波协方差。
如果式(3)给出的不确定区域是一个椭圆区域,如图2所示。该不确定区域与一般道路构成的线段有交点,则判断当前时刻目标运动在道路上,否则,认为目标不在道路上。
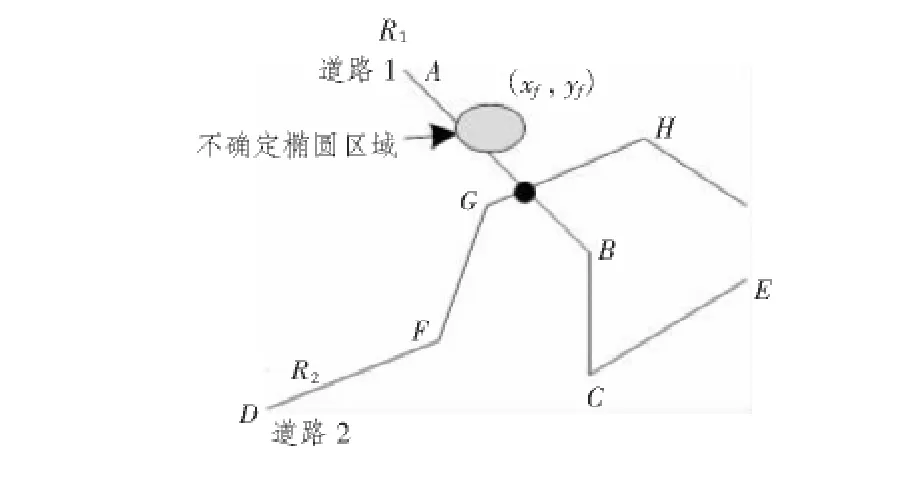
图2 位置不确定区域与道路是否相交的判别示意图Fig.2 Schematic view of distinguish whether it is intersecting between uncertainty area of position and road
设k-1时刻目标运动状态为Φ(k-1),k时刻目标状态的位置滤波为Xf(k/k)对应的协方差为P(k/k),道路集合为R,道路交叉点集合为J,道路外的地形集合为L。基于上述基本思想,下面给出模型集精简的策略。
初始条件:Φ(0)根据目标的初始位置位于哪个地理区域,可直接给定。如果初始位置对Jj∈J满足式(3),则认为目标在初始时刻过道路交叉点Jj。若存在多个初始关联交叉点,取距离最近的为关联交叉点。如果初始位置对Ri∈R满足式(3),则认为目标在初始时刻沿着道路Ri运动。若存在多条初始关联道路,取距离最近的为关联道路。如果判断初始位置在Ll∈L处,则认为目标在初始时刻在道路外的Ll处运动。
1)目标过道路交叉点,转弯进入下一条道路的运动模式判断
针对道路交叉点集合J,如果存在道路交叉点Jj∈J对应位置坐标,满足式(3),则运动模型Φ(k)=φ4,j(k),即转弯运动模型。如果同时有多个交叉点都满足,取最近邻的交叉点为关联交叉点。
2)目标进入道路或者离开道路运动模式的判断

成立,则更新Φ(k)=φ2,i(k),认为目标处于进入道路的运动模式。其中,δt为地面目标平均机动时间;如果式(7)不满足,则认为目标处于沿着道路运动模式,即 Φ(k)=φ1,i(k)。
3)目标离开道路运动模式的判断
如果 Φ(k-1)=φ3,i(k-1),对于有 N3次历史判断,有M3次不满足式(3)所定义的不确定区域与道路Ri有交点,则认为目标已经完全离开道路。
目标离开道路的时间段为[t(k-N3)-δt,t(k)]。由于决策目标离开道路的运动是一个事后决策过程,在[t(k-N3)-δt,t(k)]时间段内,需要对目标运动模型Φ(k-1)进行再次更新,并进行重复滤波跟踪。
4)目标道路外运动模式的判断
若上述判断均没有目标运动模型Φ(k-1)的更新,则认为目标在道路外运动,其运动模型Φ(k-1)= φ1,l(k -1)。
综上所述,其判断次序为:首先判断目标是否在道路交叉点;其次判断目标是否进入道路或者沿着道路运动;而后判断目标是否离开道路;最后判断目标是否在道路外运动。上述判断中,只要有一个判断成立,则不再进行后续判断。
1.4 算法流程
基于上述模型集设计,采取线性卡尔曼滤波计算公式[8],在给定初始状态模型Φ(0)的基础上,其算法流程如下:
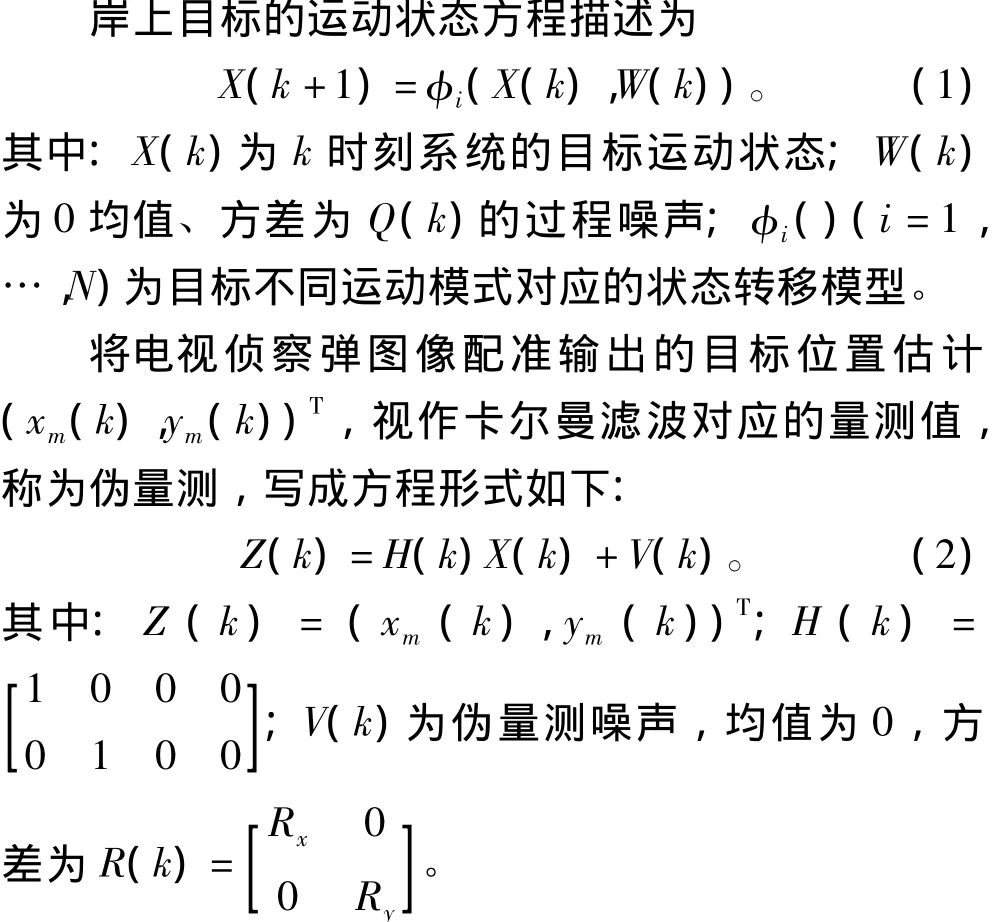
1)首先,将电视侦察弹图像配准输出的目标位置估计,视作卡尔曼滤波对应的伪量测值;
2)然后,建立基于目标运动状态模型Φ(k)的线性卡尔曼滤波,得到该时刻的位置滤波、速度滤波以及对应的位置滤波方差矩阵;
3)利用滤波值,并结合地理信息 (一般来源于电子地图),自适应辨识出地面目标当前的运动模式,从目标先验模型集中选择φi(k)来更新当前运动状态模型Φ(k),并返回第1步,再次预测。其中,对于目标从道路上离开的运动模式,因为是一个事后决策过程,需要进行滤波回溯。
1.5 仿真实例及结果分析
仿真场景如图3所示。2条道路F(34,34)G(46,42)和H(34,46)I(44,34),2个平坦区域1和2,假设目标从区域1的A点 (34,42)起,经过B点 (35.6,44)进入道路HI,到达道路交叉点C(40,39)后,转弯进入到路 FG,在 D点(42,40)离开道路 FG,进入区域2中的 E点(44,38),上述的坐标单位为km。
在仿真过程中,等周期获取岸上目标的位置量测,T=1 s,蒙特卡罗仿真次数为100次。为了简化起见,忽略道路交叉点、道路和道路外地形的差异性,并且系统方程和量测方程按照上述选择,均为线性的。量测噪声误差协方差阵为R/dial(1002,1002),dial(·)表示对角阵;对应的速度过程噪声均方差σx=σy=3 m/s。其目标运动真实参数如图4~图6所示。

图4 目标真实轨迹与有误差轨迹示意图Fig.4 Schematic view of target true trajectory and error trajectory

图5 目标运动真实参数变换示意图Fig.5 Schematic view of targetmotion with true parameter transform

图6 目标运动有误差参数变换示意图Fig.6 Schematic view of targetmotion with error parameter transform
在转弯段ω=1.5 m/s,加速过渡段加速度因子α=0.05。经过100次蒙特卡罗仿真后,其滤波均方差统计平均结果如图7和图8所示。
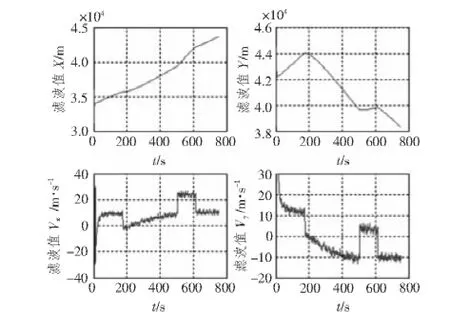
图7 目标运动参数滤波值Fig.7 Filter value of targetmotion parameter
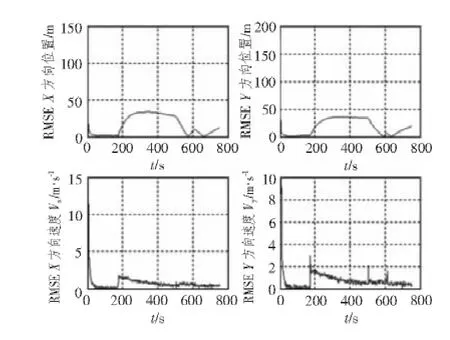
图8 均方差误差曲线图Fig.8 Graph ofmean square error
从计算结果可以看出,当目标运动到B点、C点和D点前后,即目标行驶至道路交叉点并进行强机动时,滤波方差显著增大,跟踪性能下降明显。采用运动模型调整后,在道路交叉点处的滤波方差虽然也出现了显著变大的情况,但其滤波均方差峰值较小,特别是在目标速度参数估计上,跟踪性能得到较大改善,主要原因是:在目标进入道路或者离开道路以及目标过道路交叉点时,利用了道路信息进行模式判别,优化了机动模型的选择,使得目标运动参数滤波效果具有更好的性能。
2 结语
一般来说,利用电视侦察弹来实现对岸上运动目标的定位与跟踪,在技术上存在很大的困难。本文结合地面目标运动特征和地理信息之间的关系,建立利用地理信息的实现对岸上运动目标跟踪的数学描述,分析了岸上不同的运动模式,设计了目标运动模型集,提出基于位置滤波不确定区域与道路是否相交基础上的运动模式判别方法,给出了基于自适应模型辨识的卡尔曼滤波流程,仿真结果表明,该算法可以改善岸上低速运动目标的跟踪精度,在技术上是可行的,其方法具有一定的应用参考价值。
[1]李开龙,石章松,龚驰,等.大口径舰炮多发同时弹着射击效力分析[J].舰船电子工程,2011(9):31-33.
LIKai-long,SHIZhang-song,GONG Chi,et al.Analysis of time-on-target fire effectiveness of large caliber naval gun[J].Ship Electronic Engineering,2011(9):31 -33.
[2]周建中,王海川,李敏.图像匹配技术在对岸火力支援中的应用[J].火力与指挥控制,2006,31(9):1-3.
ZHOU Jian-zhong,WANG Hai-chuan,LIMin.Applications of imagematching to seacoast fire support[J].Fire Control and Command Control,2006,31(9):1 -3.
[3]杨峰,潘泉,梁彦,等.利用地理信息的广义对地跟踪研究[J].系统工程与电子技术,2005,27(8):1475 -1480.
YANG Feng,PAN Quan,LIANG Yan,et al.Research on general ground target tracking based on terrain information[J].Systems Engineering and Electronics,2005,27(8):1475 -1480.
[4]KECC,LLINAE J.Literature survey on ground target tracking problems[EB/OL].Research Project Report,Center for Multisource Information Fusion,State University of New York at Buffalo,http://www.infofusion.buffalo.edu/reports/CMIF-3 -99%20final%20report.pdf,1999.
[5]PITMAN B,TENNE D.Tracking a convey of ground vehiclee[EB/OL].Research Project Report,Center for Multisource Information Fusion,State University New York at Buffalo,http://www.infofusion.buffalo.edu/reports/Dr.%20T%20Singh%20Reports/tenne_groundtracking.pdf,2002.
[6]KIRUBARAJAN T,SHALOM Y,PATTIPATI K R,et al.Ground target tracking with variable structure IMM estimator[J].IEEE Trans.on Aerospace and Elect ronic Systems,2000,36:6 -46.
[7]刘刚,潘泉,张洪才.电子地图在边扫描边跟踪侦察系统中的应用研究[J].控制与决策,2003,18(1):103 -105.
LIU Gang,PAN Quan,ZHANG Hong-cai.Application of electronicmap in track-while-scan surveillance-system[J].Control and Decision,2003,18(1):103 -105.
[8]石章松,刘忠,等.目标跟踪与数据融合理论及方法[M].北京:国防工业出版社,2010.91 -96.
An ashore target tracking algorithm
SHIZhang-song,DONG Yin-wen,XIAOWen-kai
(Naval University of Engineering,Wuhan 430033,China)
According to the relationship between the ground target motion characteristics and geographic information,based on the false measurement value of target position output by image sequence registration,the mathematical description on the ashore movement target tracking by using geographic information is established.The ashore variousmotionmodes are analyzed.The targetmotionmodel collection is designed.The distinguish method of movement pattern based on whether it is intersecting between uncertainty area of position filter and road is presented,and the adaptive filter based on the dynamic adjustment ofmotionmodel is provided.The simulation results show that the proposed method and algorithm are effective,and have important reference value for application.
TV reconnaissance shot;digitalmap;ashore target tracking;adjustment ofmotion model
TP279
A
1672-7649(2013)03-0106-05
10.3404/j.issn.1672-7649.2013.03.024
2012-08-31;
2012-09-27
国家自然基金(11202239)
石章松(1975-):男,博士,教授,研究方向为目标定位跟踪、信息融合及舰载武器协同控制。
