近场聚焦波束形成低频段精确定位方法
2013-03-08晁大海
晁大海
(海军驻大连地区军事代表室,辽宁大连 116021)
近场聚焦波束形成低频段精确定位方法
晁大海
(海军驻大连地区军事代表室,辽宁大连 116021)
近场聚焦波束形成声图测量方法可以实现舰船高频信号的主要噪声源的精确定位,实验证明在正横位置时的定位精度可小于2 m。但对于低频、线谱等信号,近场聚焦波束形成声图测量方法由于受阵元间距、基阵孔径等多方面影响,无法实现精确定位。本文提出采用高精度频域MVDR聚焦波束形成声图测量方法,实现频率大于200 Hz舰船目标定位。经理论仿真与实际信号分析,该方法可以实现低频信号的高精度定位,定位精度明显优于常规波束形成(CBF)。
聚焦波束形成;声图定位;近场MVDR
0 引言
众所周知,机械噪声、螺旋桨噪声和水动力噪声是舰船的三大水下噪声源,三者构成了舰船的辐射噪声和本艇声呐站的自噪声。舰船三大噪声源的产生机理、产生部位和结构之间的差异是噪声源定位与识别的基础,若能测量出这些噪声源的分布图,就可以确定其主要的辐射源位置,必定对舰艇的自身安全、提高水下攻击威力与隐身特性有着重要的现实意义。
实验证明,聚焦波束形成声图测量方法[1]是一种在近距离可以实现精确定位的方法,采用高频近距离信号定位误差可小于2 m。但该方法由于受到目标声源的频率与阵元间距的影响[2],因此其对低频目标分辨力较差。而最小方差无畸变响应(minimum variance distortionless response,MVDR[3])高分辨方位估计方法自问世以来,就以其简单的算法,良好的分辨性能得到了广泛关注,是一种具有良好实用前景的高分辨方位估计方法。本文给出近场MVDR波束形成方法,可实现最佳的信号保护、干扰消除和噪声降低能力,即信号/(干扰+噪声)比增益最大。通过该方法可以实现较低频段信号定位,具有较好的分辨能力。
本文采用频域MVDR聚焦波束形成声图测量方法,实现了舰船目标本体辐射出频率大于200 Hz噪声信号定位。通过仿真与实验数据分析,频域MVDR聚焦波束形成声图测量方法较常规近场聚焦波束形成声图测量方法性能优越,在声图中显示的亮点初出。通过采用频域MVDR聚焦波束形成声图测量方法对一艘大型实验船进行数据分析后发现该方法可以实现对某一频段信号进行定位。
1 声图测量原理
聚焦波束形成原理是将已知扫描深度的水中近场辐射目标进行平面区域的动态扫描补偿。不同于常规波束形成,它关注的是目标距离与阵尺度相近,即近场条件下的波束形成。聚焦波束形成声图处理方法由于其高精度的近场定位能力,得到了广泛研究与应用。
聚焦波束形成声图法原理如图1所示。在测量区P平面上有一目标声源S,假定一等间隔N元水平直线阵布在海深h m处与轴重合,目标源点S极坐标为 (r00,θ0),扫描点S'极坐标为 (r0,θ)。在理想条件下,假设声源声场为球面波,则聚焦波束探针输出为

其中,ri0为目标声源到阵元i的斜距;ri为扫描点到阵元i的斜距;c为声速。式(1)中时延补偿量

当式(2)成立时,扫描点S'与目标源点S重合,聚焦峰的位置即为目标所在位置。

图1 聚焦波束声图被动定位原理图Fig.1 Diagram of underwater image localization
2 近场MVDR聚焦波束形成
假设测量基阵是由m个等间隔的阵元组成,以xi(t)表示第i个阵元的接收信号,wi表示对应的加权值,则传统的波束形成器的输出可写为

MVDR波束形成意在使噪声以及来自非观测方向上的任何干扰贡献的功率最小,同时又保持观测方向上的信号功率不变,使信号源能量对波束宽度内的其他方向最小化,实际上是一个约束最佳化问题的解:

式中,α(θ)为指定的方向矢量。
通过式(6)可得出MVDR波束形成器的权向量和方位谱为[5]:

MVDR波束形成器能够提供最佳的信号保护、干扰消除和噪声降低能力,理想情况下,MVDR的波束指向性函数近似为狄利克δ函数。
比较式(4)和式(7)可发现,MVDR波束形成器与CBF波束形成器的差别主要在于:MVDR多了一个对自相关矩阵求逆的过程,其他的均与CBF类似,因此MVDR算法简单、分辨性能良好。
近场MVDR聚焦波束形成声图测量方法的权矢量和方位谱分别可被表示为:

上述的近场MVDR聚焦波束形成算法主要针对的是时域窄带信号,但在进行舰船噪声源分析时,经常用到的是宽带信号,因此可以采用宽带频域MVDR算法进行宽带信号处理。具体方法是:将宽带信号分解为多个窄带进行FFT(快速傅立叶变换)处理,对各窄带估计频域互谱矩阵,通过互谱矩阵得到MVDR权向量和输出谱。多个窄带的MVDR空间谱聚焦后得到宽带空间谱,根据谱的峰值位置确定噪声源的位置。
3 MVDR聚焦波束形成方法仿真
仿真条件:声速c=1 450 m/s,海深H=20 m。水平直线阵阵长95 m,阵元间距d=5 m,阵深h=15 m。信号采样频率fs=50 kHz,积分时间T=1 s,背景干扰为高斯白噪声,信噪比为20 dB。
极坐标系声图测量模型如图1所示。目标等深航行,在目标上有3个噪声源,噪声源深度相同,深度z0=5 m距离扫描范围1~100 m,步长1 m,方位扫描范围θ^±20°,步长 0.1°。信号为宽带噪声信号,带宽为20 Hz~3 kHz。3个噪声源的位置分别为(0°,50 m),(2°,50 m)和(10°,50 m)。
MVDR算法的计算量主要体现在阵列协方差矩阵的估计和求逆运算上,设信号的处理频段为300~400 Hz,数据快拍长度为N=1 024点。先用窄带分解MVDR算法对数据的频率进行分段,求频域平滑互谱密度矩阵,每段数据nfft=1 024点。为了减小计算量,同时提高信号的分辨率,本文采用对信号进行降采样处理,降采样系数d=50。
图2和图3分别给出了常规聚焦波束形成声图法与MVDR频域聚焦波束形成声图法的仿真结果图。图中横坐标为方位,纵坐标为距离。图2中显示了不能分清来自于0°和2°方向的信号,10°方向的信号虽然能分出,但从声图中看到其亮点面积较大,因此聚焦峰不够尖锐,不能准确分辨位置的方位。图3采用MVDR频域算法的结果则能明显分辨出3个噪声源的实际位置,从声图中可以看到亮点突出,聚焦峰尖锐。

图2 常规聚焦波束形成声图方法仿真结果Fig.2 Simulation result of conventional underwater image
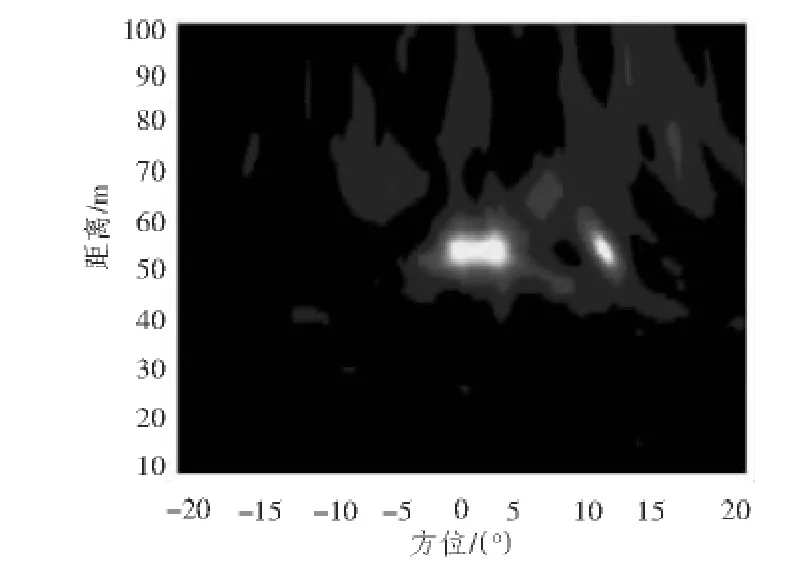
图3 MVDR频域聚焦波束形成声图仿真结果Fig.3 Simulation result of MVDR underwater image
图4和图5分别给出了2种沿距离与方位方向的剖面图。由于3个目标假定距离相同,因此从图4中沿距离方向剖面图可以清楚看到聚焦峰分辨情况。从此组仿真信号中可以得出在低频段MVDR频域聚焦波束形成声图法比常规聚焦波束形成声图法有较高的分辨能力。
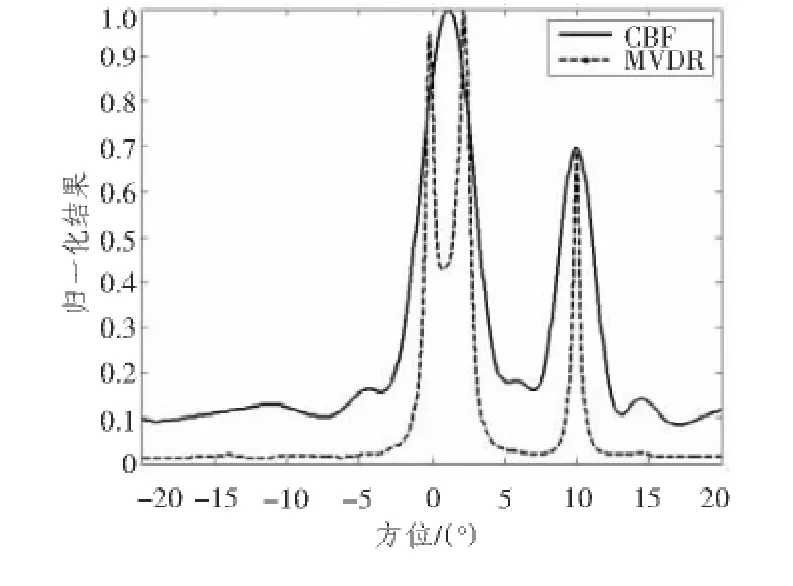
图4 两种方法沿距离方向剖面对比图Fig.4 Correlation along distance of twomethods
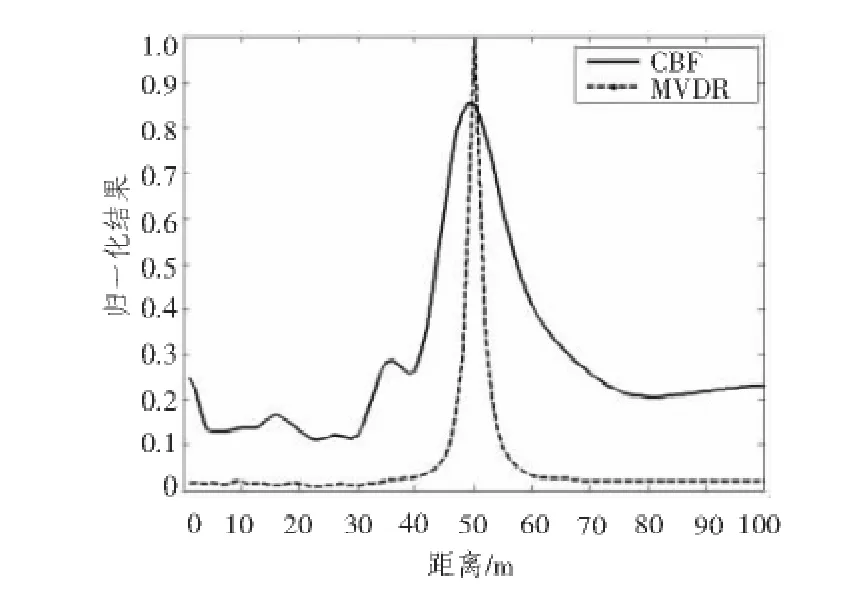
图5 两种方法沿方位方向剖面对比图Fig.5 Correlation along azimuth of twomethods
4 海试数据验证
实验布局如图6所示。10元基阵布于海底,阵元间距5 m。各阵元的位置由高精度的GPS给出(GPS定位精度为20 cm)。此次实验的目标为大型实验船,航速为6 kn,海深H为25.295 m,声速为1 488.86 m/s。
由于实验目标为某大型船,从主要声源定位的角度应该首先分析舰船目标辐射出来的高频信号,这是因为近场聚焦波束形成声图测量方法对于高频信号有很高的定位精度。而高频信号主要来源于舰船尾部,即由螺旋桨空化产生的,知道了螺旋桨位置、舰船运行方向后即可以根据实际情况推算出相应频段主要声源的位置。本文主要采用MVDR频域聚焦波束形成声图测量方法对舰船低频信号 (1 000 Hz以下)实现噪声源定位,舰船尾部位置由近场聚焦波束形成声图测量方法给出位置为 (6.5°,63.5 m)。具体实验数据处理过程为:数据采样率fs=100 Hz,降采样d=50,FFT长度N=1 024,频率分辨率Δf=fs/d/N=1.953 Hz。由于航速为3 m/s,为了实现噪声源定位,数据积分时间不能过长,因此本次实验数据处理积分时间选用0.2 s,可忽略噪声源在运动。
舰船目标辐射出来的噪声信号,当处理不同频率的信号时可能对应着不同位置的噪声信号。图7为频率300~400 Hz MVDR频域声图处理结果。图8为频域MVDR聚焦波束形成声图测量方法与常规近场聚焦波束形成声图测量方法沿距离方向剖面对比图,实验数据处理结果比仿真结果差一些,分析原因主要有:① 存在着多途效应;② 线列阵存在着阵形畸变,但总的来说频域MVDR方法的性能比CBF有明显的提高,与理论分析和仿真实验结果相符合。
5 结语
本文就舰船噪声源中低频信号无法实现精确定位的问题提出采用高精度频域MVDR聚焦波束形成声图测量方法,可以实现频率大于200 Hz舰船目标声源定位研究。经理论仿真与实际信号分析,该方法可以实现低频信号的高精确定位,定位精度明显优于CBF。经过实验证明,可以采用频域MVDR聚焦波束形成声图测量方法进行舰船目标低频信号的精确定位,但由于本次信号处理中为保证在处理的时间段内主要噪声源的移动可忽略,只采用了0.2 s的数据,因此,信号的频率特性不稳定,对于通过采用主要声源定位结果得到此声源的频率信号有一定的影响,这是要进一步解决的问题。
[1]梅继丹,惠俊英,惠娟.水平阵聚焦波束形成声图定位算法研究[J].哈尔滨工程大学学报,2007,28(7):773-778.
MEI Ji-dan,HUI Jun-ying,HUI Juan.Measurement of underwater acoustic image positions using a horizontal linear array with focused beam-forming[J].Journal of Harbin Engineering University,2007,28(7):773 -778.
[2]惠娟,胡丹,惠俊英,等.聚焦波束形成声图测量原理研究[J].声学学报,2007,32(4):356 -361.
HUIJuan,HU Dan,HUI Jun-ying,et al.Research on the measurement of distribution image of radiated noise using focused beamforming[J].Acta Acoustica,2007,32(4):357-361.
[3]时洁,杨德森,刘伯胜,等.基于MVDR聚焦波束形成的辐射噪声源近场定位方法[J].大连海事大学学报,2008,34(3):55 -58.
SHIJie,YANG De-sen,LIU Bo-sheng,etal.Radiated noise sources near-field location based on MVDR focused beamforming[J].Journal of Dalian Maritime University,2008,34(3):55 -58.
[4]梅继丹,惠俊英,惠娟.聚焦波束形成声图近场被动定位技术仿真研究[J].系统仿真学报,2008,20(5):1328 -1333.
MEI Ji-dan,HUI Jun-ying,HUI Juan.Research on simulation of near field passive ranging with underwater acoustic image by focused beam-forming[J].Journal of System Simulation,2008,20(5):1328 -1333.
[5]徐复,惠俊英,等.多途条件下聚焦波束近程定位[J].声学技术,2007,26(6):1101 -1107.
XU Fu,HUIJun-ying,et al.Focusing beamform location in multipath channel[J].Technical Acoustics,2007,26(6):1101-1107.
[6]翟春平,刘雨东.聚焦波束形成声图法误差分析[J].声学技术,2008,27(1):18 -24.
ZHAI Chun-ping,LIU Yu-dong.Error analysis of the underwater imaging method using focused beam forming[J].Technical acoustics,2008,27(1):18 -24.
[7]MAN K M,YANG I S,CHUN S Y,et al.Passive range estimation using dual focused beam formers[J].IEEE Journal of Oceanic Engineering,2002,27(3):638 -641.
[8]TRUCCO A.A least-squares approximation for the delays used in focused beamforming[J].Journat Acoustics Socience,1998,104(1):171 -175.
[9]余赟,梅继丹,翟春平,等.声图测量及定位海试研究[J].声学学报,2009,34(2):103 -109.
YU Yun,MEI Ji-dan,ZHAI Chun-ping,et al.Sea trial researches on the measurement of underwater acoustic image and position[J].Acta Acoustica,2009,34(2):103-109.
Research on warship princip le noise source location base on linearray
CHAO Da-hai
(Naval Deputy Office of Dalian Area,Dalian 116021,China)
Focused beam-forming method on near field can realize precision location of highfrequence principle noise source on warship.Location precision on the abeam may less than 2 metres by test proved.Being influenced by array-interval and basic-aperture,thismethod can’t realize precision location to low-frequency and line spectrum signal.This thesis presents MVDR focused beam-forming on frequency domain that can realize high-precison location of low-frequency signal,which overmatch CBF on location precision apparently.
focused beam-forming;underwater acoustic image ranging;MVDR on the near field
O427.5
A
1672-7649(2013)03-0035-05
10.3404/j.issn.1672-7649.2013.03.008
2012-05-22;
2012-06-19
重点实验室基金资助项目(9410C260103080C26)
晁大海(1965-),男,高级工程师,从事舰船监造及噪声测试工作。
