无刷直流电机转矩波动的新型控制策略研究
2012-12-09杨晓武李干蓉李劲松
杨晓武,李干蓉,李劲松
(铜仁职业技术学院 工程技术系,贵州 铜仁 554300)
无刷直流电机转矩波动的新型控制策略研究
杨晓武,李干蓉,李劲松
(铜仁职业技术学院 工程技术系,贵州 铜仁 554300)
在介绍无刷直流电机的优点及其应用领域的基础上,建立了电机的基本数学模型,并且阐述了其电磁转矩波动对电机运行中性能的影响,重点从理想反电动势无刷直流电机和非理想反电动势无刷直流电机两种情况下分析电磁转矩波动的因素,并采用相对的控制策略来控制电磁转矩波动;提前角开通换相法与电流控制相结合的控制策略,最后,利用MATLAB仿真软件组建了无刷直流电机的仿真模型,仿真实验结果验证了所提出的转矩波动控制策略的合理性和正确性.
无刷直流电机;转矩波动;控制策略;电流控制;提前角开通换相法
无刷直流电机由于输出转矩大,具有良好的静、动态调速性能等优点而被广泛地应用于各行各业中,尤其应用在高速度,高性能的应用领域里.电机的电磁转矩特性由平均转矩大小和平稳性两个方面组成,是无刷直流电机的重要性能指标之一,由于无刷直流电机本身的结构特点,可以获得较大的无刷直流电机平均转矩.但在转矩的平稳性方面不如一般电机,即电机换相过程中产生的转矩波动比较大,电磁转矩波动是无刷直流电机固有特性之一,是不可能消除的,制约着无刷直流电机在控制性能要求较高领域的应用[1].
1 无刷直流电机数学模型
为简化分析而又在允许条件的情况下,这里作如下的假设[2-3]:
1)忽略齿槽效应,电枢导体连续均匀分布与电枢表面;忽略磁路饱和,不计涡流和磁滞损耗;
2)不考虑电枢反应,气隙磁场分布近似梯形波,平顶宽度不小于120°电角度等.
当电动机中点与直流母线共地时,电动机的电压方程可以用如下式表示:

式(1)中uA、uB、uC分别定义为A、B和C三相输入对地的电压;iA、iB、iC分别定义为 A、B 和 C 三相电流;eA、eB、eC分别定义为 A、B 和 C 三相反电动势;RA、RB、RC分别定义为定子A、B和C三相绕组的电阻,且有RA=RB=RC=R.因此无刷直流电机的电磁转矩表示为:

2 无刷直流电机电磁转矩波动分析
2.1 理想反电动势电磁转矩脉动产生分析
电磁转矩是一个周期函数,可表示为:

从式(3)可以看得出,只要对任意一个换相周期的电磁转矩进行研究便可.在换相区域里,三相定子绕组均导通,分别为关断相,导通相和非换相.
2.1.1 换相电流因素引起的转矩脉动
换相过程中,转矩波动受到电流和反电动势共同影响,根据电压方程(1),计算出A和C两相电流的变化率表达式为:

电流变化率公式(4)表明关断相C电流呈指数递减,开通相A电流以指数规律上升[4].
2.1.2 转矩波动的推导式
根据以上分析,可以计算出以上换相过程的三种情况的电磁转矩.转矩波动的表达式如下:

由于电阻较小,可忽略其对电压影响,因此,式(5)转矩波动可分为三种情形的:
1)当Ud>4E,电机处于低速度运行阶段,开通相iA电流达到恒定值,同时关断相iC电流未降为零,存在转矩波动.
2)当Ud=4E,开通相iA电流达到恒定值,同时关断相iC电流降为零,换相时间最短,转矩波动为零,电机的电磁转矩保持恒定,是一种较理想的情况.
3)当Ud<4E,电机处于高速度运行阶段,开通相iA电流未到恒定值,同时关断相iC电流降为零,产生转矩波动[5-6].
2.1.3 不同PWM调制方式对转矩波动的分析
1)上桥换相对转矩波动研究.上桥换相过程中,有 H_PWM-L_ON,H_ON-L_PWM,ON_PWM和PWM_ON四种调制类型.根据它们的结构特点可知,ON_PWM和H_ON-L_PWM类型的调制类型具有相同的续流过程,H_PWM-L_ON和PWM_ON调制类型存在相同的续流过程.根据电压方程(1)和电磁转矩方程(2)推导出H_PWM-L_ON调制方式换相期间的理想反电动势波形下换相转矩脉动的大小为:

而H_ON-L_PWM和ON_PWM两种类型调制方式换相过程的转矩波动为:

比较式(6)和(7)得出在不同PWM调制方式下,换相电磁转矩波动差值表达式如下

式(8)说明在上桥换相过程中,采用H_ON-L_PWM和ON_PWM两种类型调制方式跟H_PWM-L_ON和PWM_ON两种类型调制方式相比,所产生的电磁转矩波动要大.
2)下桥换相对转矩波动研究.下桥换相过程,其中H_PWM-L_ON和ON_PWM两种调制方式具有相同的续流过程,H_ON-L_PWM和PWM_ON两种调制方式有相同的续流过程.以下分析H_PWM-L_ON和ON_PWM型调制方式与H_ON-L_PWM和PWM_ON两种调制方式产生的电磁转矩波动对比.H_PWM-L_ON和ON_PWM型调制方式产生的电磁转矩波动为

H_ON-L_PWM和PWM_ON两种调制方式换相过程中的电磁转矩波动表达式为

对比式(11)和(9),推出在这两种不同PWM调制方式下的电磁转矩波动数值如为

根据以上分析,在上半桥换相过程中,采用H_PWM-L_ON和PWM_ON两种调制方式与H_ON-L_PWM和ON_PWM两种调调制方式相比起来,前者产生的电磁转矩波动比较小;而在下半桥换相过程中,采用H_ON-L_PWM和PWM_ON两种调制方式与H_PWM-L_ON和ON_PWM两种调调制方式相比起来,前者产生的电磁转矩波动比较小;以上四种调制方式均属于半桥调制,四种调制方式相比起来,采用PWM_ON调制类型产生最小的电磁转矩波动.由于不可避免的截至相导通形式的发生,半桥调制将使电机截至相电流产生不对称的正负波形,产生其他的电流,在相反电动势的作用下产生转矩,使电磁转矩波动变大.
3)PWM调制策略对转矩波动的影响实现[7].无刷直流电机在正常换相过程中的低转速运行区域内,当Ud<4E,采用PWM_ON类型调制策略可以最大程度的控制电磁转矩波动.其办法是通过调节占空比使相反电动势相幅值和直流母线电压数值上相等,来消除转矩波动,使电机运行过程中产生平稳的电磁转矩,该控制策略同时可以避免了由于电机换相过程中开通相电流和关断相电流变化不同而产生的电磁转矩波动.这里将占空比ρ的数值大小始终设置为1便可达到控制转矩波动的目的[7-9].
当Ud>4E时,利用重叠换相可以解决电机运转速度处于中高速状态区域利用PWM调制方式不能消除转矩波动的原因.为便于分析,这里取上面已经分析的下桥换相中H_PWM-L_ON和ON_PWM型调制方式下转动波动表达式为

来分析.
为消除电磁转矩波动,对式(13)的时间进行两边微分,假设结果为零,则可以推导出占空比的关系表达式:

由式(14)说明,合理而适当地设置占空比ρ的数值大小,即可达到消除无刷直流电机处于高速运行时的电磁转矩波动.
2.2 非理想反电势电磁转矩脉动产生分析
反电动势由于受到各种因素的影响,其平顶波形会发生一些不规则的变化,波形的平顶宽度小于120°,由于定子绕组中的电子元器件电阻随温度的变化而变化,影响到电流的大小,同时电感在电路中起到限制电流的作用,电流的变化随着电感的增大而变慢,这样,使得定子电流的大小无法获取精确的电流变化规律,使电机产生转矩波动,从而影响电磁转矩的性能[2].
2.2.1 转矩波动因素分析
假设三相电机驱动的电流平顶波形宽度为120°电角度,影响转矩波动的因素是反电动势,能否利用控制策略实现对由于非理想方电动势造成的转矩波动的有效控制极为重要,而反电动势波形的平顶宽度大小反应了反电动势的重要因素.
2.2 .2转矩波动控制策略分析
无刷直流电机换相过程中,常用的转矩波动控制策略的有:重叠换相法、电流预测控制策略、结合现代控制理论技术控制策略,由于现代控制理论不受到电机数学模型的影响,能解决电磁转矩随动性能较差的问题[1,8].
由于非理想反电动势原因,导致无刷直流电机换相过程不能正常换相,产生转矩,因此采用提前角开通换相法来控制电磁转矩波动,然后提出将提前角开通换相法与电流控制相结合的控制策略来控制电磁转矩波动.以下分别从提前角开通换相策略和提前角开通换相法与电流控制相结合的控制策略来论述.从本质上来说,超前角开通换相法是重叠换相法的一种,提前一段时间来开通不应开通的开关元器件,以下我们就从它的应用范围来分析研究转矩波动控制.
提前换相方法就是开通相提前某个角度导通,而其他不变.根据理想状态下的换相顺序,可得到各换相的相电流.假设换相提前角度为α,各电流的导通与转子角位置的关系见表1.

表1 相电流与转子位置的关系Tab.1 The relationship of phrase current and rotor position
其中iA、iB、iC是提前换相相得电流,跟理想电流换相相比,增加了六个提前换相电流值.联合120°的梯形波反电动势,可以计算出各状态下的电磁转矩的数值见表1.表1说明了不管提前换相角度的大小是多少,但是三电流大小基本上式不变化的,不同的是三相电流的方向有所不同.确定了转速,输入电压,那么电机的反电动势与电流就确定了.如果是非理想的反电动势,梯形波小于120°时,无刷直流电机转矩的变化规律.首先定性分析在0-2pi内的反电动势波形,它的中心位置不变,只是两端各减小θ角度.
2.2.3 提前角开通换相法与电流控制相结合的控制策略
要在电机换相过程中实现对相电流的补偿,关键是在换相区域内选择一个适合的导通角度.这里有两种情形:一是在提前导通角开通相前给原有给定的激励电流加入一个相位相同的电流,使原先的给定激励电流加大,然而这种方法不易实现,因为电机本体中的定子绕组带有一定数值的电感.而电感本身就是具有阻止电流变化的特点,因此很难满足及时补偿电流的效果,变产生不定的电流纹波及其电磁转矩波动,影响电机的性能;因此,电流补偿这一环节应在提前导通角开通相电流有目的性的给予.因此,从电流环节的上升与下降的斜率,幅值和相位几个方面入手来分析正确实施对对相电流的补偿,由位置检测装置检测出的三相位置信号来决定电机的正常换相时刻.假设给定以下几个与位置信号相关的角度,将它们分别定义为:Φ1为提前导通角;Φ2为电流补偿提前导通角,Φ3为参考电流平顶波形角,Φ4为参考电流右斜坡之间角,Φ5为参考电流左斜坡之间角,且有一个明显的特点就是Φ2大于等于Φ1才能实现对提前换相的电流补偿,故适当对以上各个角度进行设计非常重要[3].
3 仿真结果与实验分析
3.1 仿真模型的建立
为便于分析,首先给出模拟仿真图(见图1).
3.2 实验参数的设定
针对上述的无刷直流电机模型,其相关参数设置如下:电机的极对数为p=4,额定转速为5000r/min,相电感L=0.0035H,相电阻R=2.975Ω,反电动势系数ke=0.0016(V/(r/min)),阻尼系数γ=4e-4(N·m·s),转动惯量J=0.089(kg·m2),PWM载波频率为20 kHz,比例系数P为0.13,积分系数I为12.7.非理想反电动势波形平顶宽度为105.5°.当电机运行处于中高速度区域里,须采用提前换相控制策略,并结合电流补偿控制策略来改变换相过程中的转矩波动[1].
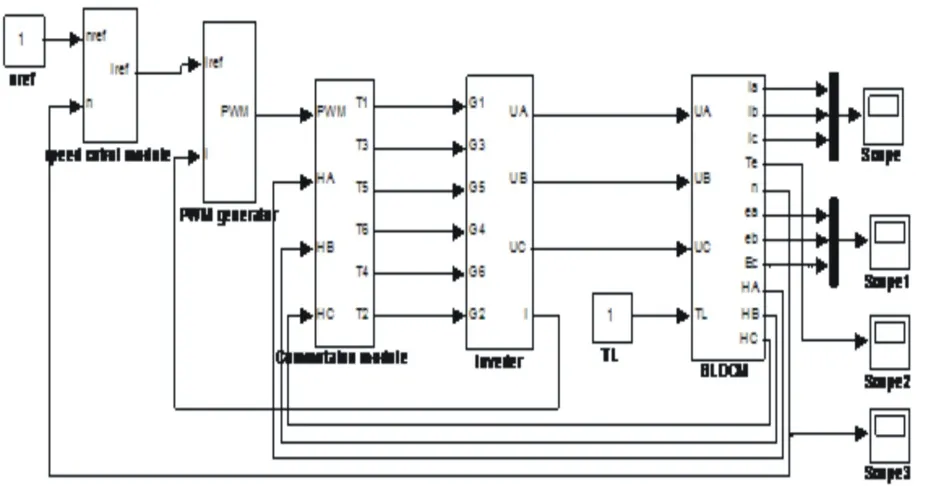
图1 无刷直流电机控制系统的仿真模型图Fig.1The simulation model diagram of BLDCM control system
3.3 实验仿真结果及分析
在无刷直流电机给定参数相同的情况下,在MATLAB仿真模型上对PWM调制频率进行不同的设定,并且不断的修正其参数,找出以下给出在占空比不同和频率相同的情况下几组有比较意义的实验仿真图2.图2是在两种不同占空比下的电磁转矩波动的情况,表明了转矩波动随着占空比的减小而增大.

表2 占空比不同,频率一定下的转矩波动性能对比Tab.2The performance comparison of Torque Ripple under the same frequency and different duty ratio


图2 两种不同占空比下的转矩波动情况(a)ρ=0.95,(b)ρ=0.70Fig.2 The situation of Torque Ripple under two kinds of different duty ratio(a)ρ=0.95,(b)ρ=0.70
由于电磁转矩的大小跟电流具有正比的关系,因此电磁转矩随着给定电流的变化而变化.根据给定不同的参考激励电流,在换相过程中也对其电流补偿数值做适当的改变,一般来说给定的参考电流值较大的时候,由于换相过程三相电流变化也相对大一点,导致磁转矩波动也会大,因此其补偿电流也会大点,这样才能在不同的换相过程.以下给出两组不同的补偿电流和不同角度之间的关系见表3,仿真结果见图3,图4.通过对图3和图4的比较,得出结论见表4.
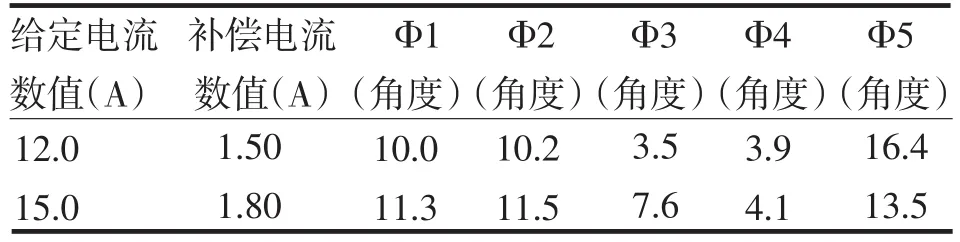
表3 补偿电流与不同角度的关系Tab.3 The relationship of different angles and compensation current

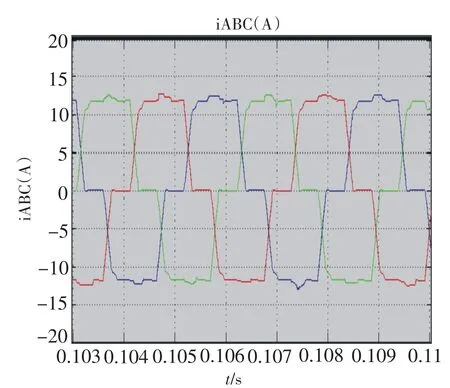
图3 给定电流为12A时电磁转矩波动及电流变化Fig.3 Electromagnetic torque ripple and current change under 12A given current
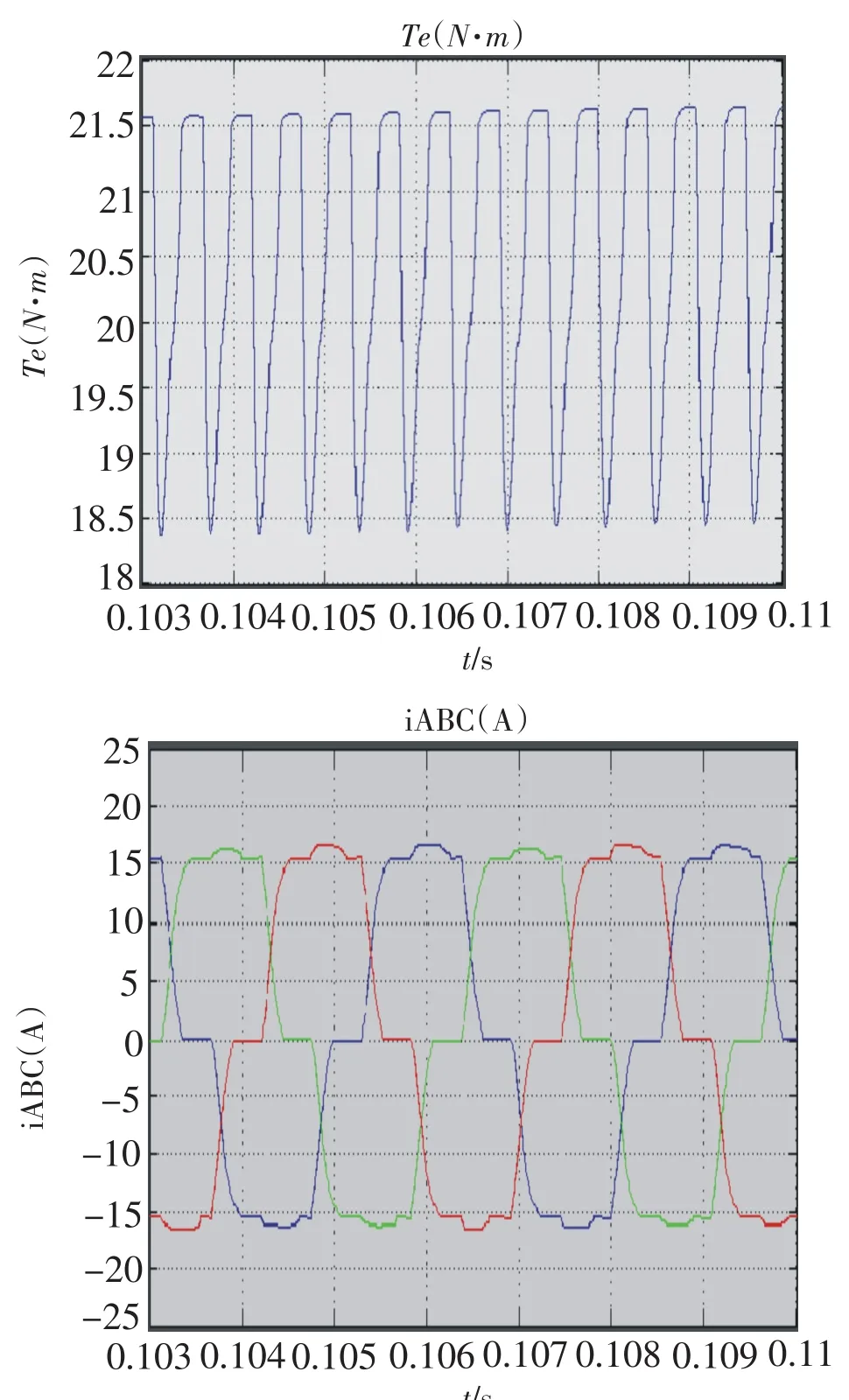
图4 给定电流为15A时电磁转矩波动及三相电流变化Fig.4 Electromagnetic torque ripple and three-phrase current changes under 15A given current

表4 不同电流补偿下的转矩波动性能对比Tab.4The performance comparison of Torque Ripple under different compensation current
4 结论
本文提出了对无刷直流电机转矩波动的提前角开通换相法与电流控制相结合的控制策略.仿真实验结果表明,本文提出的提前角开通换相法与电流控制相结合的控制策略能有效地抑制无刷直流电机的电磁转矩波动.
[1]陈冬,房建成.非理想梯形波反电势永磁无刷直流电机换相转矩脉动抑制方法[J].中国电机工程学报,2008,28(30):79-83.
[2]陈冬,房建成.非理想梯形波反电势永磁无刷直流电机换相转矩脉动抑制方法[J].中国电机工程学报,2008,28(30):79-83.
[3]齐蓉,周素莹,林辉,等.无刷直流电机PWM调制方式与转矩脉动关系研究[J].微电机,2006,39(1):58-61.
[4]王雷.无刷直流电机调速系统的研究[D].浙江:浙江大学,2008.
[5]韦鲲.永磁无刷直流电机电磁转矩脉动抑制技术的研究[D].浙江:浙江大学,2005.
[6]Lee D Y,Kim G T.Design of thrust ripple minimization by equivalent magnetizing current considering slot effect[J].IEEE Trans Magn 2006;42(4):1367-70.
[7]刘刚,王志强,房建成.永磁无刷直流电机控制技术与应用[M].北京:机械工业出版社,2009.
[8]蔡秋花,马菲,张文英.一种无刷直流电机测控系统设计[J].控制工程,2005,25:221-222.
[9]姜田贵,周波,洪春梅.用于驱动无刷直流电机的矩阵变换器控制策略[J].电机与控制学报,2009,13(2):239-244.
The Research of A Novel Control Strategy on Torque Ripple for Brushless Direct Current Motor
YANG Xiaowu,LI Ganrong,LI Jinsong
(Department of Engineering and Technology,TongRen Polytechnic College,TongRen554300,China)
The advantage and application area of Brushless Direct Current Motor(BLDCM)was described,the relative mathematic model was built and the effect of electromagnetic torque ripple on the performance of BLDCM was elaborat⁃ed.The paper discussed factors that affected the torque ripple from the case of the ideal back-EMF and non-ideal back-EMF for BLDCM,then the relevant control strategy are put forward to minimize the torque ripple.The strategy com⁃bines the advanced commutation with the current control to minimize the torque ripple caused by non-ideal back-EMF.Finally,the paper built simulation model for BLDCM by using software MATLAB according to the proposed control strat⁃egy targeted at torque ripple,the experimental simulation results show that the proposed control strategy for reducing torque ripple is correct and reasonable.
BLDCM;torque ripple;control strategy;current control;advanced commutation
TM 33
A
1674-4942(2012)01-0050-06
2011-12-09
黄 澜