基于激光鼠标传感器的导丝遥操作系统的设计与试验
2012-12-05沈杰李盛林陈大国言勇华
【作 者】沈杰,李盛林,陈大国,言勇华
1 解放军第四五五医院,上海,200052
2 上海交通大学机器人研究所,上海,200240
肝动脉化疗栓塞(TACE)是当前用于治疗肝脏肿瘤的重要的介入疗法。因肝脏附近的血管较为复杂,需要先将导丝引导至病灶,再将导管沿导丝滑入。传统的TACE术为医生手动操作,主要存在以下两个不足:(1)导丝插入过程中的X射线成像会对医生造成辐射伤害;(2)导丝插入过程中图像为二维图像,复杂的血管网络在没有三维信息的情况下给插管工作带来了较大困难。使用导丝遥操作系统可以较好地解决这些问题[1]。
1 基于激光鼠标传感器的导丝运动检测装置设计
传统的微创介入手术中,医生常用的技巧有推送、回拉和捻旋等。在使用视觉反馈的导丝机器人辅助插入中,能否快速准确地检测导丝的动作决定了系统能否正常工作,因而对传感器的灵敏度要求要高于精度要求。文献[5]中的方案可使医生如同操作真正的导丝,在长距离连续进给时手需要不断更换位置。
图像处理的方法可用于运动检测,特别是非接触式运动检测领域[6]。激光鼠标传感器(Laser Mouse Sensor,LMS)利用微型激光器照亮被检测表面,同时一个微型CMOS传感器不断获取被照亮区域的图像,经过传感器内部的DSP处理后,比较相邻两次采样时图像的差别,计算出两幅图像在二维平面的上的位移。
1.1 测试平台搭建
工作于血管中的介入手术导丝只有两个自由度(忽略弯曲),即沿自身轴线进退以及绕轴线旋转。这样应确定导丝实际运动距离及角度与LMS检测数据之间的关系。
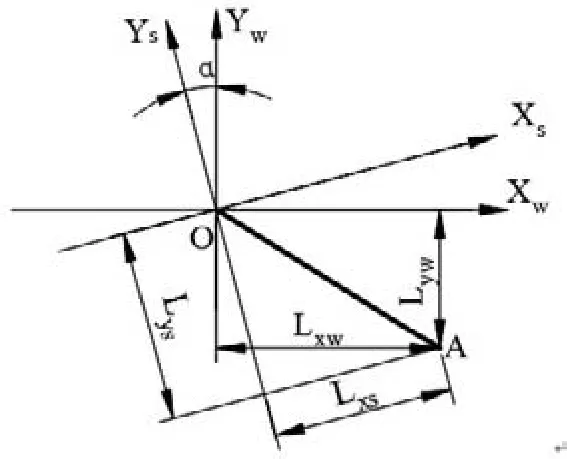
图1 LMS检测坐标系与导丝坐标系Fig.1 Coordinates for LMS Detecting and Guide wire
令导丝旋转角和直线运动距离分别为θ和L mm。如图1所示,LMS检测坐标系为XsOYs,导丝坐标系为XwOYw。由于安装误差等原因,XsOYs与XwOYw可能存在夹角,令其为α,在导丝运动过程中,其表面上某点从原点O运动到A点。
设Lxs和Lys分别为LMS在X轴和Y轴上检测到位移的数值(后文中直接用Xs、Ys分别代替Lxs、Lys),K1和K2分别为L与Ys、θ与Xs的比值。则有如下关系[7]:

设中间变量Xw和Yw分别为导丝坐标系中X和Y方向上的变化量,即有关系式(2):

在通过实验数据确定K1、K2和α等参数后,对LMS检测的数据代入式(1)即可求得θ和L。图2为使用LMS的导丝运动检测模块示意图。
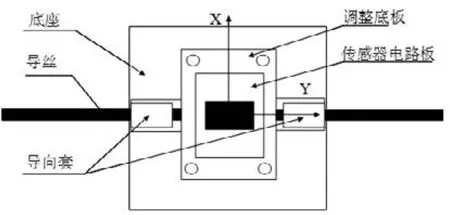
图2 基于LMS的导丝运动检测模块Fig.2 Guide wire motion detection module based on LMS
在上述运动检测模块的基础上,搭建了一个实验平台,使用步进电机1通过螺杆驱动一个滑台,实现直线运动;滑台上的另一台步进电机2实现旋转运动,介入导丝与电机2固连。介入导丝为日本Terumo的mm导丝。
1.2 测试步骤
根据前述测试方法,进行实验。在对装置进行标定后,控制两个步进电机分别执行相应的运动。第一组实验中仅对导丝施以直线运动,实际运动距离YA=0.2 mm,重复进行5次,得到如表1所示的数据。根据表中的XS和YS的平均值和式(1),可以求出,再由式(2)可求得Xw和Yw。再根据式(1),此时导丝无旋转,故有θ=0,则。第二组实验中仅对导丝施以旋转运动,旋转角度为。实验与计算过程与第一组实验类似,实验结果列于表2中,计算得到。
1.3 实验数据与分析
在确定安装误差夹角α及比例系数K1和K2之后,对装置进行精度与线性度实验。首先,对导丝只施加直线运动,运动距离为从0.5 mm到3 mm,步长为0.5 mm。检测得到数据经变换后结果如图3所示,试验数据绝对误差均小于0.05 mm,相对误差均小于5%。再对导丝施加单独的旋转运动,角度从π/72到2π,从图4作图的数据可得到角度检测分辨率为0.05 rad。
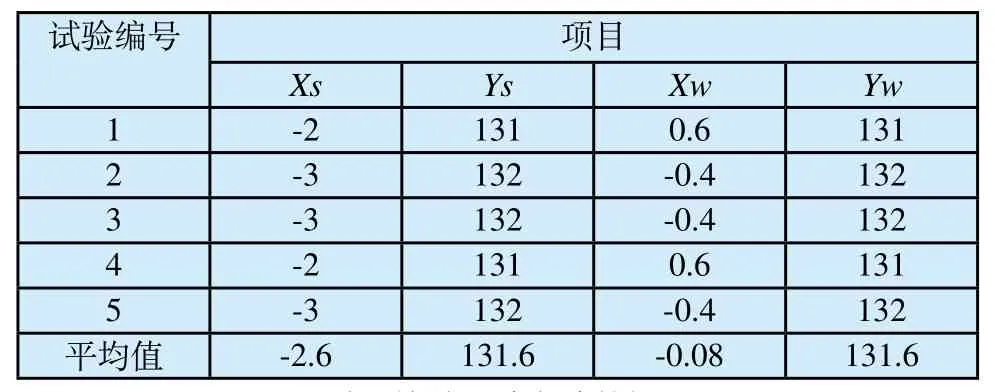
表1 直线运动实验数据Tab.1 Data for linear motion test
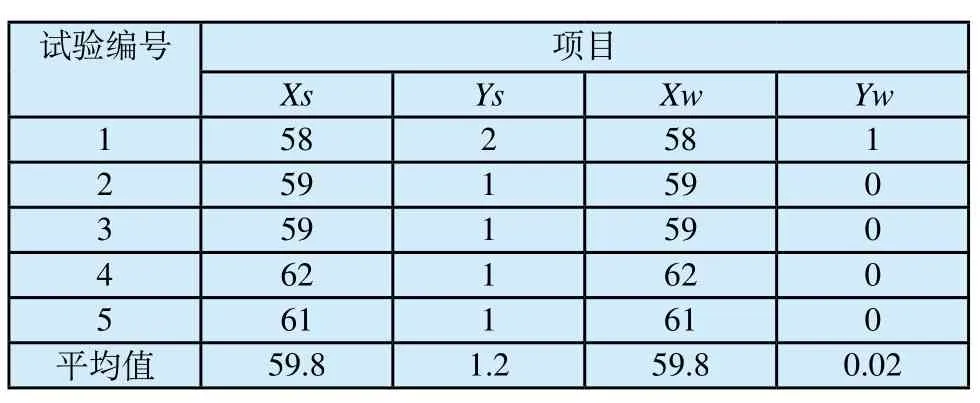
表2 旋转运动实验数据Tab.2 Data for rotary motion test
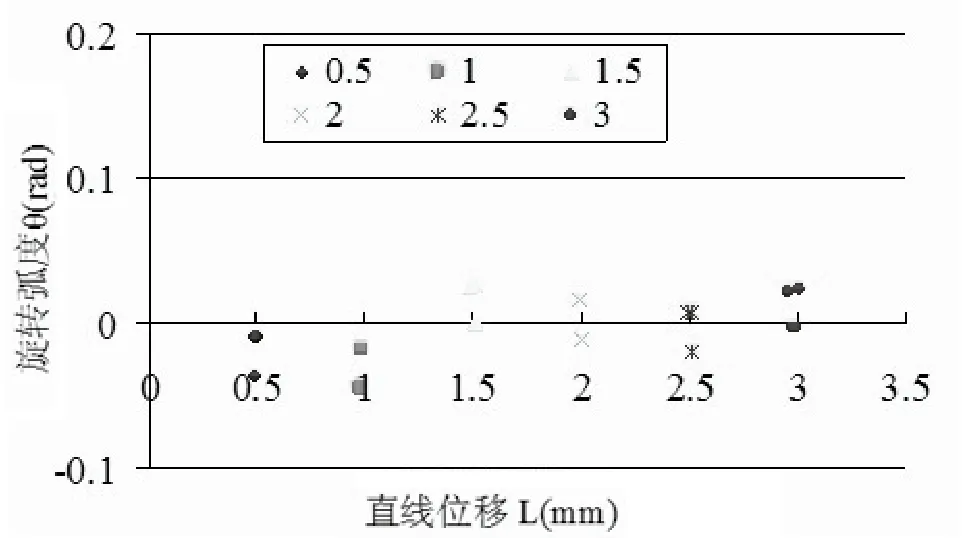
图3 单直线运动时数据分布图Fig.3 Data distribution of linear motion
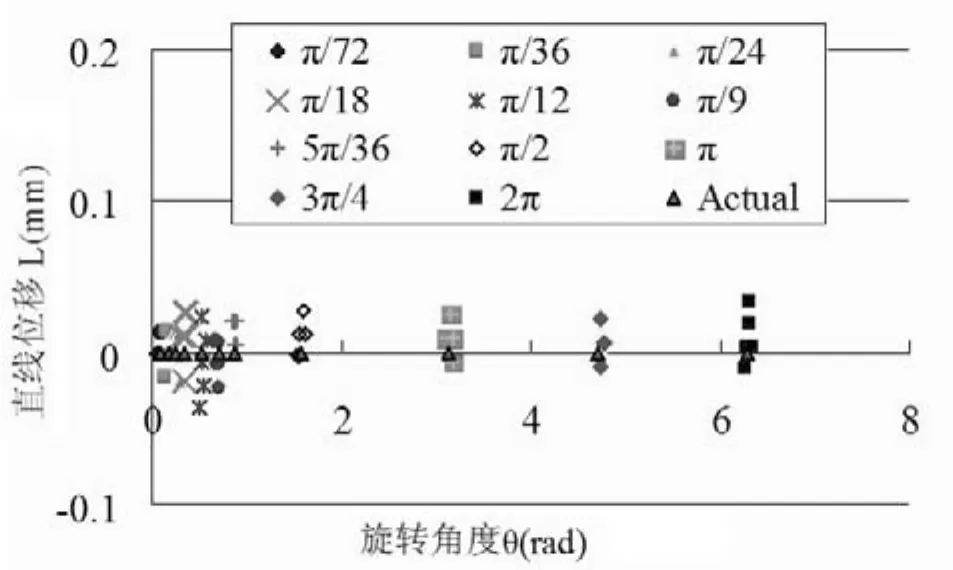
图4 单旋转运动时数据分布图Fig.4 Data distribution of rotary motion
2 导丝遥操作系统的设计
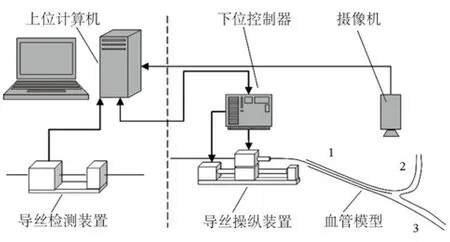
图5 导丝遥操作系统Fig.5 Guide wire tele-manipulation system
一个完整的介入导丝遥操作系统至少应当包括以下部分:导丝进给装置、导丝运动检测装置、成像设备及图像处理装置、监控及显示设备和计算机[1],如图5所示。导丝遥操作系统分为两部分,处于X光安全区域的控制部分和暴露在X光下的操作部分。控制部分主要为上位计算机和导丝运动检测装置。医生在计算机屏幕上的目标区域图像辅助下操作导丝,导丝运动检测装置检测医生的操作进程。
2.1 导丝运动检测装置设计
使用第1节中描述的基于LMS的导丝运动检测模块设计了导丝检测装置。如图6所示,两个长方体盒固定在底板上,左边长方体内放置激光鼠标传感器,并预留了力反馈装置的空间;右边长方体作支撑导丝用,使导丝不至于下垂;左、右两个长方体在各自的左右两壁均钻有小孔让导丝穿过。左、右长方体之间的距离为150 mm,这是考虑到人手宽度大约为50 mm,且导丝一次实际进给量最大约为100 mm。

图6 导丝运动检测装置Fig.6 Apparatus for guide wire motion detection
2.2 导丝操纵装置设计
导丝操纵装置是操作在血管内的导丝的装置。它需要准确地复现导丝检测装置所检测到的运动,并提供完善的保护措施,否则可能对病人造成伤害。
如图7所示,电机1通过螺杆驱动滑块实现直线运动,固定在滑块上的电机2实现旋转运动。要实现直线往复运动,需要在电机2轴上安装一个夹持装置,配合电机1实现夹紧或放松。
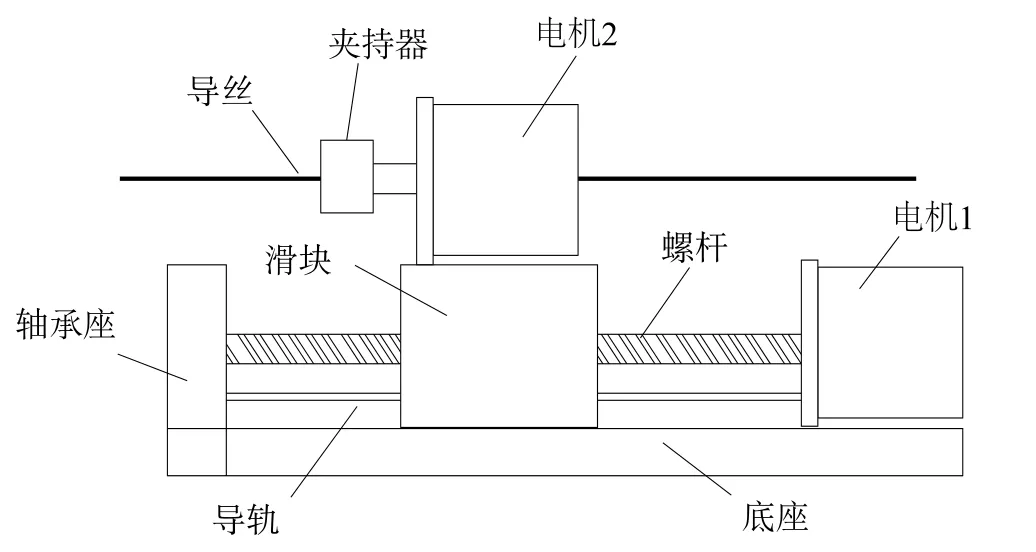
图7 导丝操纵装置Fig.7 Apparatus for guide wire manipulation
滑块螺杆上的行程约为2倍导丝检测装置中人手的行程,在等待状态下滑块处于螺杆长度中央。为减少在小进给量操作时滑块频繁回中,可设定规则如下:若单次直线进给量大于1/2单向行程,则必须回中;若单次直线进给量小于1/2,则计算累计路程,若累计量大于1/2单身行程,则回中,否则保持原位置。
3 导丝遥操作系统软件设计
导丝遥操作系统的软件需要上、下位机配合实现。上位机软件主要负责采集激光鼠标传感器数据,将处理后的数据发送给下位机,同时显示摄像头所采集的图像。
3.1 上位机软件实现
上位机采用普通PC,程序启动后先进行初始化,再开启数据采集线程、处理线程以及视频显示线程。数据采集线程通过调用Windows系统底层API来获得LMS的数据。该数据是相对偏移量Xrel、Yrel,因此在数据采集线程中分别将其累加至Xabs、Yabs。以一定时长为处理周期(如100 ms),先检查串口发送空闲标志,若串口空闲,则向处理线程发送数据,否则继续等待。接着将Xabs、Yabs清零,回到采集数据位置。
3.2 下位机软件实现
下位机采用ARM7开发板(MCU为三星S3C44B0X,66 MHz,8 MB SDRAM,2 MB Nor Flash)。ARM处理器是一种32位的高性能、低功耗的RISC芯片,支持多种嵌入式操作系统、带有丰富的外设,在控制领域和消费电子领域得到了广泛的应用。
下位机程序初始化后,即开始进入无限循环。当串口接收缓冲接收到设定阈值的数据后,引发串口接收中断,进入中断服务程序(ISR)接收数据。数据全部接收完毕后,按该控制周期内的脉冲数修改定时器的频率等参数,然后启动定时器。定时器计数器减至零时,将定时器输出引脚翻转。定时器每翻转两次,脉冲计数减1,如此循环直至脉冲计数减至零,程序结束。
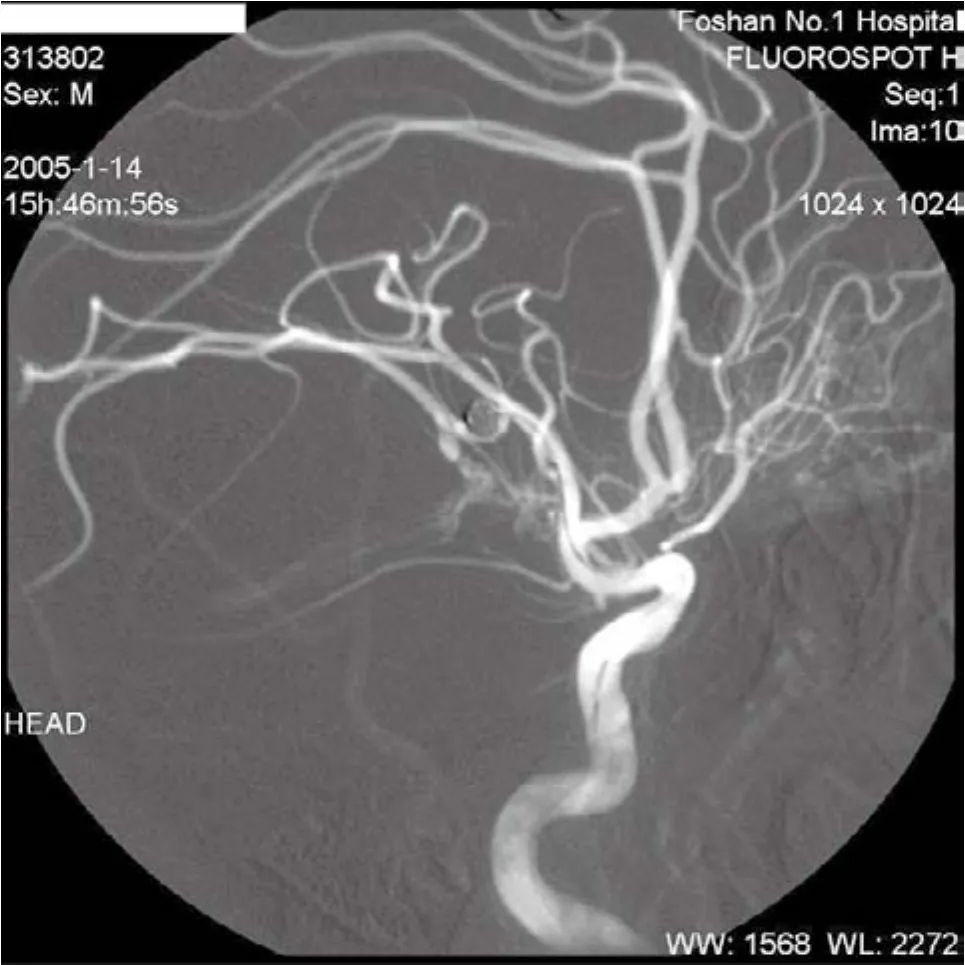
图8 肝动脉X光图像Fig.8 X-ray Image of liver artery
4 实验研究
用前面介绍的硬件和软件,进行激光鼠标用于导丝导航的实验验证。如图8所示,图中白色分叉状物体为血管,而中间较为模糊的黑线为正在操作中的导丝。本实验中利用透明PVC软管模拟主血管,用软管壁上钻的小孔模拟分支血管。将摄像头安装于垂直水平面方向向下,令导丝到目标小孔的距离为d、小孔中心与软管轴线连线与摄像头拍摄平面垂线之间夹角为β。以d分别为30、40、50 mm,角度β分别为0o、30o、90o、120o两个变量进行实验,每个组合重复5次,求得平均值,所得数据见表3。从表3可以看出,在角度β一定时,距离d对完成时间有一定影响;而在d一定时,β对完成时间的影响更为显著。在d一定,β=0o时用时最短,这是因为此时图像中小孔的影像最清晰,方位最明确。而在β=90o时花时最长,这是因为小孔正好处在图像方位最差的地方,需要反复尝试才可能达到目标点。在β=120o时,所花时间处于β=90o与β=30o之间。同时也可以看到,同一d和β下,各次实验时间花费差异较大,且在β较为不利时,所花时间差异也较大。总结前面的结果可得出,在使用视觉反馈的导丝导航装置中,影响完成导丝遥操作的时间长短主要因素是视觉反馈的信息量,即图像为二维图像,缺少方位信息。

表3 不同d和β下遥操作所用时间对比Tab.3 Time cost of tele-manipulation at different d and β
5 结论
本文介绍了一种将激光鼠标用于导丝检测的方法,在所搭建的试验平台上进行试验,评估了该传感器的性能,验证了激光鼠标用于导丝检测是可行的。在此基础上,设计了视觉反馈的导丝遥操作系统,并进行了实验。结果表明,该装置可完成导丝导航的任务,同时也得知图像的深度信息对操作时间的影响较大。下一步将对力反馈进行研究以增加临场感,尝试使用多摄像头以及图像融合等技术实现图像的三维重建,从而减少操作时间。
[1]陈大国,沈杰,言勇华.机器人辅助导管插入系统技术进展[J].中国医疗器械杂志.2010,34(1): 35-38.
[2]Reddy V Y,Petr N,Zachary J.M,et al.View-synchronized robotic image-guided therapy for atrial fibrillation ablation; experimental validation and clinical feasibility[J].Circulation.2007,115(21):2705-2714.
[3]Mark S.P,Jeroen S,Carlos Van M,et al.Magnetic navigation in percutaneous coronary intervention[J].Journal of Interventional Cardiology,2006,19(6): 558-565.
[4]Rafael B,Luis G,Dan D,et al.Remote-control percutaneous coronary interventions: Concept,validation,and first-inhumans pilot clinical trial[J].Journal of the American College of Cardiology.2006,47(2): 296-300.
[5]Yogesh T,Jeffrey S.B,David W.H,et al.Design and performance evaluation of a remote catheter navigation system[J].IEEE Transactions on Biomedical Engineering,2009,56 (7):1901-1908.
[6]熊会元,宗志坚,高群.数控激光扫描测量系统[J].机械设计与制造,2004,25(3): 33-36.
[7]Yan Y,Chen D,Yin H.Optics based motion measurement for a catheter navigation system: a novel and low cost approach[C].Intelligent Robotics and Applications.p.II.2010: 475-485.
[8]赖维铁.人机工程学[M].武汉: 华中理工大学出版社,1997.
[9]刘达,王田苗,田增民.血管介入手术机器人推进机构[P].中国专利:200910089761.8,2009-12-30.
