碰撞式能量传递型转膛自动机研究
2012-11-23郭竞尧党小可刘建斌
郭竞尧,党小可,刘 彦,刘建斌
(西北机电工程研究所,陕西 咸阳 712099)
射速是火炮威力的重要指标之一。随着工业科技技术的发展,以巡航导弹为代表的精确制导武器的体积越来越小、运动速度越来越快,对防御一方的威胁越来越大,这就要求防空高炮的射速也必须大幅度提高。笔者以提高转膛自动机的射速为目标,从降低自动机驱动功率的思路出发,在撞击理论的基础上,提出了碰撞式能量传递型转膛自动机的设想[1]。
1 结构工作过程
转膛自动机具有多个药室,对应不同药室的输弹、关闩、击发、抽壳等不同的动作在时序上有重叠,因此射速较高[2]。
传统结构制约着转膛自动机射速进一步提高。为此,提出了一种碰撞式能量传递型转膛体驱动结构的设想:在转膛体外侧增加1个飞轮,当转膛体转动到位时撞击飞轮,转膛体停止而飞轮则开始转动,转膛体动能的一部分传递给飞轮储存起来;当飞轮转动到位后,又撞击转膛体使飞轮停止而转膛体开始转动。
该转膛结构分为转膛体(中间的部分)和飞轮(外层部分)两部分,其上各有两个凸起用于相互撞击,如图1所示。图1中位置1为转膛体停止而飞轮开始转动位置,在此期间1号弹膛处于闭锁状态并完成击发、输弹、抛壳等动作。飞轮转动90°后到达图1中位置2,并与转膛体发生撞击,由于两个件的转动惯量基本相同,撞击后飞轮基本停止,转膛体则以一定的速度开始转动,在此期间进行推弹及抛壳装置收回,击针收回并被卡锁卡住,实现待发。转膛体随后转动90°后到达图1中位置3,并与飞轮发生撞击,撞击后转膛体基本停止,飞轮则以一定的速度开始转动,此时2号弹膛处在击发位置并完成另一个击发、输弹、抛壳等动作循环。转膛体、飞轮如此交替转动实现自动机的连发射击。
为了能够准确控制转膛体和飞轮的转动、停止及定位,还需设置驱动轮、转向装置和定位齿,其结构如图2所示。

驱动轮上装有转向装置,当飞轮转动时,转向装置的前端部与飞轮啮合,当飞轮接近碰撞位置时,转向装置在曲线槽的作用下转动,其前端部与飞轮脱开并与转膛体啮合,后端部则推出安装于飞轮内的定位齿并嵌入炮箱的定位槽中。在与转膛体的撞击后,在定位齿的作用下,飞轮停转并被固定在相应的位置,而转膛体则在飞轮的撞击下获得一定的速度后开始转动,安装在转膛体内的另一个定位齿收回并与转膛体一起转动。由转膛体到飞轮的运动转换过程与以上过程相同。在此过程中驱动轮一直处于转动状态,其上的锥齿轮通过曲柄连杆机构带动输弹、击发、抛壳机构做前后的直线运动。
2 仿真分析
2.1 分析及仿真
基于以上驱动模式构建的自动机如图3所示。此驱动模式的转膛自动机因为采用了转膛体、飞轮碰撞交替旋转的特性,尽可能地减小了转膛体启动、停止时的能量损失,故使用外能源驱动自动机工作。
其外能源驱动传动关系如图4所示,电机输出扭矩传给锥齿轮Z2,锥齿轮Z2带动驱动轮上齿轮Z1使驱动轮保持连续转动,再由Z1传动至齿轮Z8带动拨弹轮转动。同时电机又通过锥齿轮Z2带动锥齿轮Z3,锥齿轮Z3上的曲柄连杆机构带动输弹机构推弹入膛。
该自动机由于没有专用闩体前后运动及闭锁时的撞击,而输弹功率较小可忽略,并且抽壳动作可以引用火药气体的能量,因此,自动机主要消耗的功率为转膛体、飞轮之间的撞击,转膛体、飞轮分别与驱动轮之间的撞击及供弹时弹带运动的功率。
所需电机平均功率为:
P=P1+P2
(1)
式中:P1为撞击消耗的平均功率;P2弹带运动功率。
2.1.1 转膛体、飞轮和驱动轮撞击的平均功率计算[3]
首先,当驱动轮带动转膛体以角速度ω匀速转动,转到一定的角度后,转膛体与驱动轮脱离,然后转膛体撞击飞轮,撞击飞轮后转膛体停止转动,撞击后飞轮的转动角速度为:
(2)
式中:J1为转膛体转动惯量;J2为飞轮转动惯量;b为撞击恢复系数。
然后驱动轮撞击飞轮并带动飞轮转动。驱动轮撞击飞轮后,根据动量守恒可得:
Jω+J2ω2=(J+J2)ω22
(3)
即:
式中:J为驱动轮转动惯量。
因此,转膛体撞击飞轮,然后驱动轮撞击飞轮过程中消耗的能量为:

(4)
同理可得,当驱动轮带动飞轮转过一定角度后,飞轮撞击转膛体、飞轮停止转动,然后驱动轮撞击转膛体后一起转动过程消耗的能量为:
由于击发后至下一发的过程,分别完成以上的两次撞击。因此,消耗的平均功率为:
(6)
式中:t=60/n,t为每两发之间的时间间隔;n为射速,发/分。
2.1.2 弹带平均功率计算[2,4]
在射击过程中,弹带运动对拨弹轮产生阻力。计算中将弹带简化为沿长度均匀分布的线弹性带状体,近似方法计算弹带阻力。如果弹带倾斜放置(如图5所示),则弹带阻力还应包括炮弹和弹链节的重力分量及摩擦力,利用弹性力学的方法推导出弹带阻力矩的简化公式为:
n1(m22+ml)gf+
n2(m22+ml)g(sinα+fcosα)
(7)
式中:n1(m22+ml)gf为平置炮弹因重力产生的摩擦力;n2(m22+ml)g(sinα+fcosα)为悬挂部分的重力和摩擦力。
因在高速运动时,这两项相对前一项的值很小,可忽略不计,因此弹带阻力矩为:
(8)
式中:K为单个弹链节的刚度;mdl为单个炮弹及弹链节的质量;RRc为弹轴到拨弹轮轴线之距;ω3为拨弹轮的角速度。
由传动关系图可知,主动轮至拨弹轮之间的传速比为:
ω3=i×ω
因此,弹带匀速运动消耗的功率为:
P2=Tp×ω3
(9)
以这种结构的30 mm口径、4膛转膛自动机为例,取b=0.4,i=2.5,根据式(1)、(6)和(9)可得不同射速下的撞击平均消耗功率、弹带平均消耗功率及电机平均功率,见表1和图6。
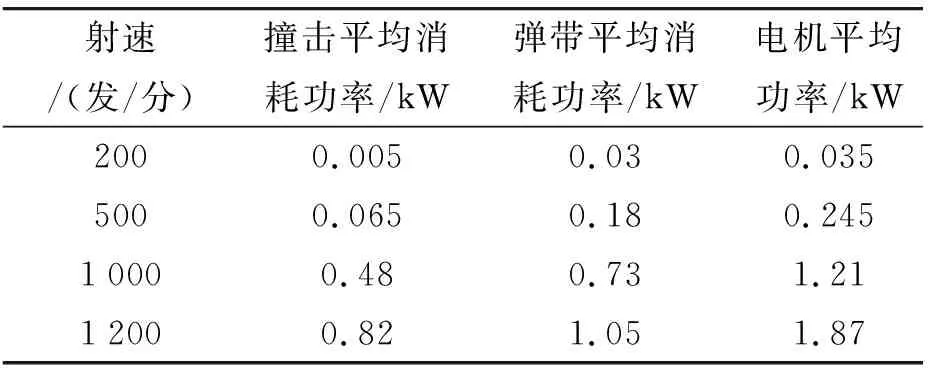
表1 撞击平均消耗功率、弹带平均消耗功率及电机平均功率对照表

2.1.3 传统结构转膛自动机的转膛体启停平均功率计算
传统结构转膛自动机每次击发间隔中,转膛体均由静止启动然后再停止,动能完全消耗,假设每一个运动周期转膛体按恒角加速度加速和减速,则有:
(10)
即:
式中:αc为转膛体的角加速度;ωc0为转膛体的初始角速度;tc为转膛体由初始角速度到最大角速度所需的时间;θ为转膛体由初始角速度到最大角速度所转过的角度。
由于转膛体是由静止开始启动,所以ωc0=0,则可得:
(11)
所以,转膛体每个运动周期内消耗的能量为:
(12)
式中:Tc为产生转膛体角加速度的扭矩;Jc为转膛体的转动惯量。
因此,转膛体每个运动周期内消耗的平均功率为:
(13)
根据状态假设有t=2tc
(14)
以30 mm口径、4膛传统结构转膛自动机为例,其转膛体启停平均功率见表2。

表2 传统结构转膛自动机转膛体启停平均功率
2.2 仿真结果分析
从表1、图6,以及表1和表2的对比可以看出,基于碰撞式能量传递型转膛自动机的驱动功率也随着射速上升呈指数上升趋势,但利用碰撞来进行能量传递,能够使转膛体和飞轮交替转动时一个构件停止后其动能传递到另一个构件上,相对于传统结构转膛自动机转膛体启停所需功率已经大大降低,加之此结构可以实现连续供弹,消耗功率在相同射速下也较间歇式供弹低,所以总体所需驱动功率较小。
3 结束语
本文在转膛原理自动机的范畴中,提出了一种利用碰撞式能量传递型转膛体驱动结构形式,降低了转膛体启停的功率消耗,并且可实现连续供弹又能降低消耗在供弹上的功率,故而有利于自动机达到更高射速。
小口径自动机经过几十年的发展已经形成了固定的几种原理,而每种原理下又有固定的一种或几种结构形式,近些年来没有显现大的改变或者突破。希望通过以上这样的研究,使得转膛自动机以及其他种类的小口径自动机能得到更进一步的发展。
[1] 梁世瑞.自动机创新学引论[M].北京:国防工业出版社,2007:126-128.
LIANG Shi-rui . The automatic machine innovation learns general introduction[M] .Beijing : National Defense Industry Press,2007:126-128.(in Chinese)
[2] 何志强,黄守仁,李载弘.航空自动机武器设计手册[M].北京:国防工业出版社,1990:135-136,229-230.
HE Zhi-qiang,HUANG Shou-ren,LI Zai-hong.Aircraft automatic gun design manual[M] .Beijing : National Defense Industry Press,1990:135-136,229-230.(in Chinese)
[3] 韩魁英,王梦林,朱素君.火炮自动机设计[M].北京:国防工业出版社,1988:85-89.
Han Kui-ying,WANG Meng-lin,ZHU Su-jun.Automatic gun design[M].Beijing:National Defense Industry Press,1988:85-89.(in Chinese)
[4] 齐晓林.航空自动武器[M].北京:国防工业出版社,2008:56-58.
QI Xiao-lin.Aircraft automatic weapon[M].Beijing : National Defense Industry Press,2008:56-58.(in Chinese)
