室内控制场数码相机检校应用于通用航空摄影测量的可行性研究
2012-11-13任超峰
李 伟,任超峰
(1.天津市测绘院,天津 300191;2.中国测绘科学研究院,北京 100039)
室内控制场数码相机检校应用于通用航空摄影测量的可行性研究
李 伟1,任超峰2
(1.天津市测绘院,天津 300191;2.中国测绘科学研究院,北京 100039)
非量测数码相机已广泛应用于计算机视觉、摄影测量等领域,但必须对其进行内定向和构像畸变的校正。常用的检校方法主要有室外检校法和室内检校法两类,其中利用室外三维控制场进行数码相机检校是目前较为成熟的做法,而室内三维控制场检校精度能否达到常规比例尺航空摄影要求尚未进行有效验证。通过论述一整套室内三维控制场相机检校方法,并对比分析两种检校结果表明,室内三维控制场检校精度还无法满足通用航摄精度要求。
控制场;最小二乘;相机检校;直接线性变换
1 概 述
目前,无人机低空航测遥感系统在我国精细测绘、应急测绘、国土资源监测等方面的应用已逐渐展开。其系统组成一般包括:飞行平台、成像系统、数据处理软件三部分[1]。而成像系统通常采用普通非量测数码照相机。在具体工程项目中,更换不同的型号或者不同焦距的镜头会造成成像系统内部参数不稳定[2-3]。而且,非量测数码相机的主距f和像主点在像中心坐标系的坐标(x0,y0)是未知的,在不同的摄影距离下主距和像主点也会发生变化,同时非量测相机的镜头畸变差较大,导致物方点、摄影中心和像点间的共线关系遭到破坏,影响物方坐标的解算精度,如果不进行相机检校,直接应用,必然会对航空摄影测量的精度造成影响。因此,在使用普通非量测数码照相机之前必须经过检校,以得到成像系统的内方位参数及畸变参数。
数码相机检校的内容包括:主点坐标的测定、主距的测定、光学畸变系数的测定、感光元件面阵内畸变系数的测定。通常使用的三维控制场可以分为室外和室内两种[4-5],如图1、图2所示。室外三维控制场的检校精度在文献[2-6]中已经得到验证,可以满足常规航空摄影测量要求。然而,室内三维控制场的检校精度能否达到常规航空摄影测量要求尚未得到验证。本文将论述室内三维控制场检校方法,并以室外三维控制场的检校结果作为参考,验证室内三维控制场的检校精度能否满足常规航空摄影测量的要求。
2 室内三维控制场建立
室内三维控制场,是室内建立的三维控制系统,系统内按一定规律布设有一群已知空间坐标的控制标志。通常,控制场通常布设为多侧用室内三维控制场,即控制点布设在多侧墙面上,如图2所示。
一般全站仪都具有一定的可观测角,而在一测站之内,无法观测到布设在全站仪正上方之上的部分控制点。因此,需要观测至少2个测站才能将所有控制点观测到。对于多个测站观测到的控制点需要进行坐标相似变换,将观测结果换算到统一的坐标系下。所以,在后一个测站需要观测一定数量的同名点,用以坐标解算。
3 相机检校算法
检查和校正摄影机(胶片相机、数码相机、摄像机等,本文统称为摄影机)内方位元素和光学畸变系数的过程称之为摄影机的检校[7]。为了进行对比分析,本文采用单片后方交会的方法分别在室内三维控制场和室外三维控制场,采用相同的相机检校算法进行检校。
3.1 相机检校数学模型
本文采用的检校方法是基于空间后方交会的检校方法,以严格的共线方程为基础,以像点坐标为观测值,采用最小二乘平差方法,解求相机内外方位元素、畸变系数以及其他辅助参数。顾及改正项的共线方程为
3.2 相机检校的畸变模型
非量测数码相机的镜头畸变差主要指光学畸变差,包括径向畸变差和偏心畸变差[5]。
径向畸变差用一个多项式方程表示为

偏心畸变差为

感光元件面阵内变形参数用多项式经验公式为

则畸变差改正模型为
式中:r=,k1、k2为径向畸变系数,p1、p2为切向畸变系数,α为像素的非正方形比例因子,β为CCD阵列排列非正交性的畸变系数。
3.3 相机检校平差模型
将式(1)按照泰勒级数展开一次项式

式(6)可以写为

式(8)即为数码相机检校的平差模型。
3.4 求解检校参数初值
根据式(6),观测一定数量的像平面坐标,按照最小二乘方法平差,求解检校参数。由于解算过程是一个迭代过程,必须为未知数提供初值,否则,迭代过程无法收敛。本文采用直接线性变换(DLT)求解未知数,为最小二乘平差提供初值。
直接线性变换是建立像点坐标仪坐标和相应物点物方空间坐标之间直接的线性关系的算法。假设式(1)中的畸变改正均为0,进行变形组合为
像平面点(x,y)为观测值,按照间接平差方法,可由式(6)导出DLT平差模型为
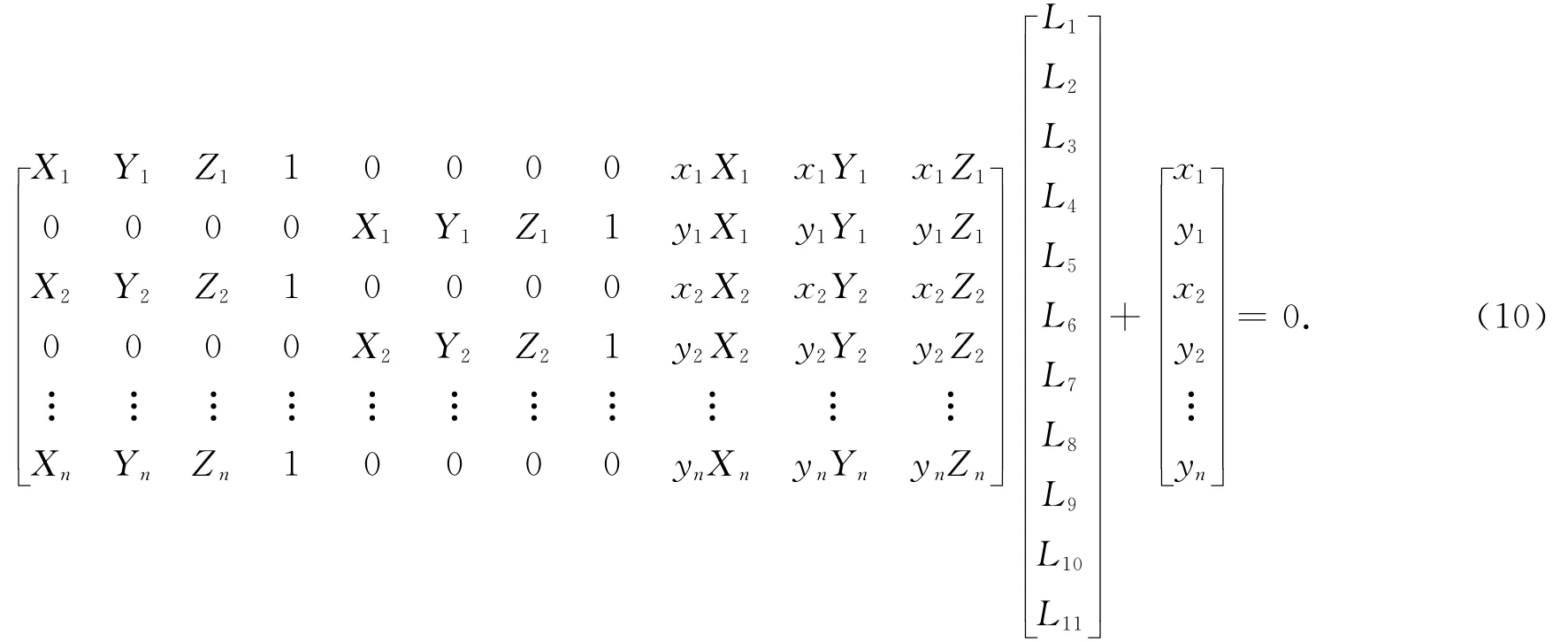
由式(10)可知,该方程共有11个未知数,每对观测值(xi,yi),(Xi,Yi,Zi)可以列出2个方程,故计算式(10)至少需要6对观测值参与解算。利用一定数量的控制点坐标及像平面点坐标,按照式(7)进行最小二乘平差,解求未知数L1,…,L11,进而利用未知数L1,…,L11之间的关系,求出相机内方位、外方位及旋转矩阵初值。然后利用初值,代入式(8),进行平差求解,迭代出内方位、外方位及6个系数。
4 实验结果分析
本研究采用数码相机佳能5D Mark II为实验相机,镜头焦距35 mm,最大有效像素约2100万像素(5616×3744)。在相同的参数设置下(相机设置不变,焦距、IOS及曝光时间等均不变),拍摄室外三维控制场及室内三维控制场。利用本文的方法,分别进行检校,结果如表1所示。
室外控制场精度较高,且已经过生产检验,检校精度完全满足生产需要,所以,现假设室外检校结果为真值。如表1所示,室内控制场检校结果,径向畸变基本一致,切向畸变相差较大,尤其是内方位,平面相差5.27像素,焦距相差29.53个像素,按照文献[6]所述,内方位检校精度要求为


式中:mX、mY为平面坐标量测精度,mh为高程坐标量测精度,f为主距,h为被测物体深度。
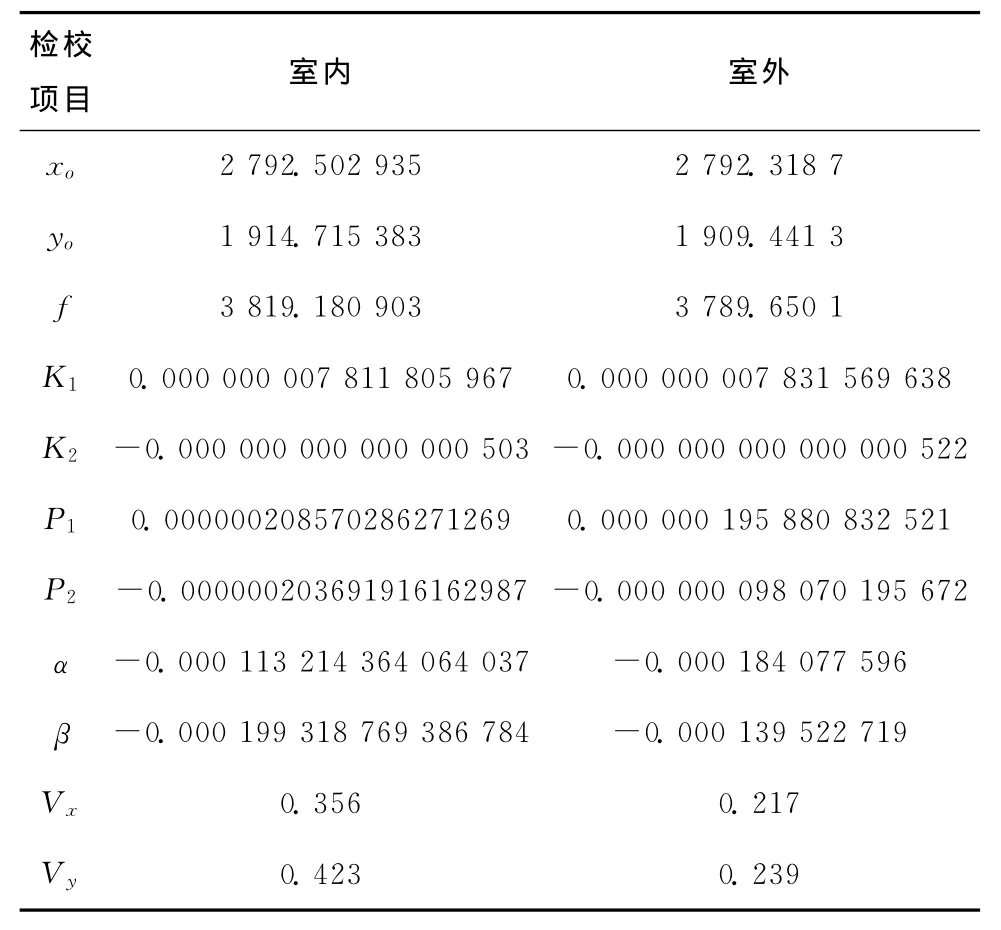
表1 检校结果对比
假设摄影距离为600 m,摄影比例尺为1∶2 000,mX=mY=0.2,mh=0.4 m,按照式(11)计算,mx0=my0=0.73像素,mf=1.46像素,即检校内方位平面精度优于0.73个像素,主距精度优于1.46个精度。显然,本次试验的室内三维控制场检校精度无法满足生产需求。
5 结束语
根据当前非量测数码相机在无人低空航测领域的应用需求,分析了在室内三维控制场进行相机检校能否满足常规航空摄影测量的要求,详细介绍了非量测数码相机的检校流程,对比分析室内及室外三维控制场的检校精度。根据实际检校分析,主要是由于室内检校场空间有限,落在像幅内的控制点数量有限,另外由于拍摄距离太近,直接影响到像平面点的量测精度,所以检校结果精度有限。由此得出,室内三维控制场的检校精度无法满足常规比例尺航摄精度要求。
[1]彭晓东,林宗坚.无人飞艇低空航测系统[J].测绘科学,2009,34(4):11-15.
[2]彭晓东,林宗坚,解菲菲.基于单位四元数的数码相机检校[J].测绘科学,2009,34(6):7-10.
[3]崔红霞.无人机低空数码摄影测量系统研究[D].武汉:武汉大学,2006.
[4]王之卓.摄影测量原理[M].北京:测绘出版社,1979.
[5]卢秀山,冯尊德,王东,等.数码相机检校中的病态性及其解决措施[M].武汉大学学报:信息科学版,2003,28(特刊):44-47.
[6]王东.基于多片空间后方交会的CCD相机检校[D].青岛:山东科技大学,2003.
[7]冯文灏.关于近景摄影机检校的几个问题[J].测绘通报,2000(10):1-3.
[8]冯文灏.近景摄影测量[M].武汉:武汉大学出版社,2002:100.
[9]王冬,冯文灏,卢秀山.多片空间后交法实现Hasselblad相机检校[J].辽宁工程技术大学学报,2007,26(3):341-344.
[10]苗红杰,赵文吉,刘先林.数码相机检校和摄像测量的部分问题探讨[J].首都师范大学学报:自然科学版,2005,26(1):117-120.
Research on the feasibility of non-metric digital camera calibration in indoor control field applies to general aero photography
LI Wei1,REN Chao-feng2
(1.Tianjin Institute of Surveying and Mapping,Tianjin 300191,China;2.Chinese Academy of Surveying and Mapping,Beijing 100039,China)
Non-metric digital camera has been widely used in the field of computer vision,photogrammetry and so on.Interior orientation and image distortion correction is necessary when we use non-metric digital camera.The calibration method contains two types of indoor and outdoor.Three-dimensional control field of the outdoor for digital camera calibration is the mature method.The precision of three-dimensional control field of the indoor used in the field of conventional aerial photography has not be verified.It discusses three-dimensional control field of the indoor camera calibration method and make a comparative analysis of two calibration results.The conclusion is the calibration precision of three-dimensional control field of indoor can not meet the general requirements of aero photography.
control field;least-squares procedure;camera calibration;DLT
P231
A
1006-7949(2012)04-0049-04
2011-09-28
李 伟(1984-),男,助理工程师.
[责任编辑:刘文霞]
