离心模型试验中路堤地基差异沉降控制装置的研制
2012-11-12万小全
陈 虎,罗 强,张 良,万小全,李 铁
(西南交通大学高速铁路线路工程教育部重点实验室,成都 610031)
1 研究背景
铁路路基是一种带状结构物,在路堤与桥台交界处、路基与横向结构物连接处、地基土层变化较大部位及地基处理措施变化处,容易产生差异沉降,导致轨面的不平顺,致使车辆高速通过时引起剧烈振动,影响乘坐的舒适性和行车的平稳性[1-3]。尤其是高速列车的运行对线路的稳定性与平顺性提出了更高更严格的要求[4]。目前,我国规定时速250~350km/h高速铁路无砟轨道路基工后沉降不宜超过15mm,路基与桥梁、隧道或横向结构物交界处的工后沉降差不应大于5mm,不均匀沉降造成的折角不大于1/1 000[5]。高速铁路路堤通常采用优质填料填筑压实标准较高一般工后变形较小,差异沉降主要是由地基的不均匀变形引起[6]。因此,通过试验研究地基不均匀沉降在路堤填土中的传递规律及引起的路基面不均匀变形特性,对掌握铁路中不同结构物均匀过渡技术具有重要的理论意义。
土工离心模型试验作为一种可再现原型结构特性的试验方法,已在土力学及岩土工程中的各个领域得到了广泛应用[7-8]。为了更好地掌握地基差异沉降的传递扩散规律,开发一种能够在离心场中实现地基差异沉降的控制装置十分必要。由于土工离心模型试验时施加在模型上的离心惯性力是模型自重的N(模型比例)倍,即使只是控制其中部分填土的沉降,其离心惯性力也不容小视。因此,实现地基差异沉降的控制装置必须能够承受较大的载荷。其次由于离心模型试验中的位移是原型位移的1/N,差异沉降控制装置的位移控制系统还必须能够精确地给定沉降位移。
本文研制了一种土工离心机试验的路堤地基差异沉降控制装置。该装置操作简单方便,能够在离心机运转状态下实现地基差异沉降的实时精确控制。逐次控制可以实现地基差异沉降逐步发展的全过程模拟。通过改装也可适用于其他类型过渡段问题的研究。
2 地基差异位移控制系统
差异沉降的根本原因在于两侧的地基性质的差异[9]。结合过渡段的特点,本文将地基差异沉降简化为以下2种形式(图1):①错台式差异沉降;②渐变式差异沉降。
针对以上2种地基差异沉降的简化形式,试验采用的差异沉降控制装置主要包括:①位移控制系统;②固定支撑墩;③差异沉降控制板,包括沉降板、倾斜板和不动板。位移控制系统及固定支撑墩固定在模型箱底,差异沉降控制板安装在位移控制系统及固定支撑墩上,差异沉降控制板上填筑路堤模型。错台式差异沉降通过沉降板和不动板之间的垂向错位模拟;渐变式差异沉降的模拟方式为:在沉降板和不动板之间加装一块倾斜板,倾斜板一端支撑在位移控制系统升降部件上,一端支撑在固定支撑墩上,在沉降板垂直下降时,倾斜板一端与沉降板一起沉降,另一端绕支撑转动。
错台式差异沉降与渐变式差异沉降控制方式基本一致,本文重点阐述错台式差异沉降的控制方法,图2所示为错台式地基差异位移控制装置示意图。
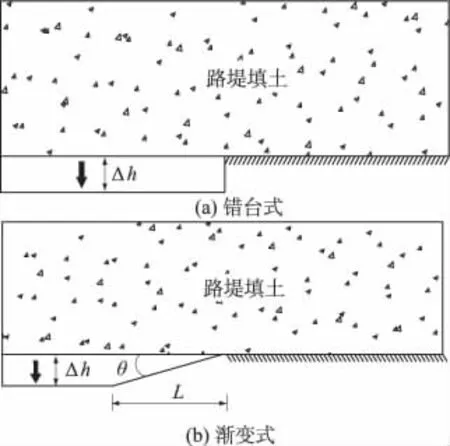
图1 地基差异沉降简化形式Fig.1 Simplified types of differential settlement of embankment foundation
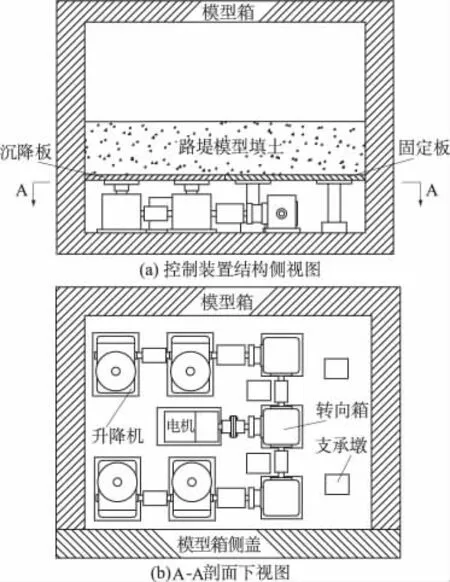
图2 错台式地基差异位移控制装置示意图Fig.2 Schematic diagrams of control device for the differential settlement of staggered platform embankment foundation
2.1 位移控制系统
位移控制系统是整个地基差异沉降控制装置的核心,主要作用是在离心机运转过程中控制沉降板下沉和倾斜板的倾斜。试验采用的方案是由1台步进伺服电机通过3台转向箱驱动4台升降机组成,如图3(a)所示。通过刚性联轴器的机械连接,单台电机同时驱动4台升降机同步升降,从而能够保证差异沉降控制板的平稳运行。各部件安装座下固定有不同厚度的钢垫板,用来实现各部件转轴同轴。每台升降机下的钢垫板具有通孔,孔中心对准升降机丝杆中心,且孔的直径大于升降机丝杆直径,如图3(b)所示,当升降机丝杆下降时,丝杆进入钢垫板孔中。
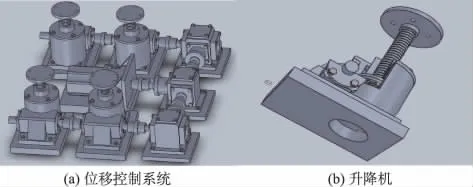
图3 位移控制系统及升降机示意图Fig.3 Schematic diagrams of settlement control device and worm-wheel screwed hoists
升降机为JWM型蜗轮丝杆型,主要构成部件为精密梯形丝杆副与高精度涡轮蜗杆副,JWM型蜗轮丝杆升降机具有自锁功能,没有制动装置也可保持载重。升降机是位移控制系统中最大的部件,控制整个差异沉降装置的高度和长度。由于升降机为标准部件各型号的尺寸固定,型号越大相应的尺寸及承载能力越大。考虑模型箱内的空间以及每台升降机的最大载荷能力,试验采用的升降机型号为JWM025US-24-25JM,丝杆顶端配置法兰盘,最大载荷24.5kN,输入轴每回转一圈丝杆(法兰盘)轴向位移0.21mm,丝杆最大行程为25mm。
转向箱为1台三轴T型转向箱及2台两轴转向箱,三轴T型转向箱将电机的驱动力平均分配到左右2台两轴转向箱,2台两轴转向箱各驱动2台升降机同时升降,3台转向箱的减速比均为2∶1,传动效率98%。
由于模型箱内的空间有限,地基差异沉降控制装置的高度不能太高。大功率的步进电机相应的尺寸也更大,试验采用的步进伺服电机的保持转矩为4 N·m。设在外部的步进电机驱动器通过离心机的滑环与步进伺服电机连接,驱动器通过拨码开关设置细分电流,细分电流设置越高,步进电机每转动一圈所需步数越多。通过PLC或者计算机很容易控制1台电机的动作。为增大扭矩电机前安装了1台行星减速器,行星减速器直接套盒在电机的输出轴上,减速比为10∶1,传动效率98%。综合以上各部件计算得到的系统提供的理论最大扭矩为150.59 N·m。
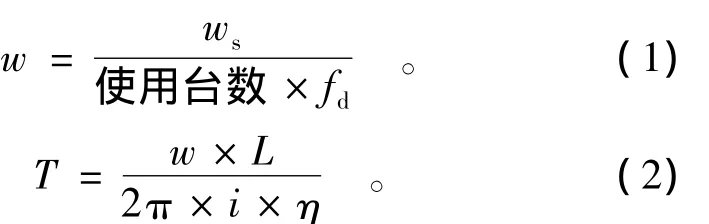
位移控制系统驱动源的最大扭矩必须大于使用扭矩,一般驱动源的启动扭矩应为使用扭矩的2倍以上。使用扭矩可以通过以下步骤计算:①计算模型沉降部分填土及差异沉降控制板沉降部分的总重量wmax;②计算位移控制系统总机当量载荷ws,计算公式为,无冲击载荷负荷惯性小时,使用系数fs为1.0~1.3,取1.15;③采用式(1)计算单台升降机的当量载荷w,4台连动时连动系数fd为0.85;④采用式(2)计算每台升降机所需输入的扭矩T,其中:JWM025US-24-25JM的丝杠螺距 L为0.005 m;减速比 i为24;升降机的综合效率 η为0.11;⑤计算使用扭矩。
位移控制系统是由步进电机、步进电机减速器、转向箱以及升降机组成。各部件本身不可避免存在齿轮之间的啮合缝隙以及联轴器连接各部件时的连结缝隙。为了消除以上部件制造过程中以及联轴器安装时造成的回差,提高控制精度。在差异位移控制系统安装调试完成后每次试验填筑模型填土之前,先控制电机动作使沉降板上升并高于设定位置,然后控制电机反转使沉降板降至设定位置,以消除系统回差。
2.2 固定支撑墩
固定支撑墩主要作用是固定不动板以及在倾斜板倾斜时提供转动支撑。由于模型空间有限,位移控制系统占了大半个模型箱底部,为了能够在狭小的空间安装固定支撑墩,采用4只哑铃型支撑墩作为固定支撑墩,如图2(b)所示。在模拟渐变式差异沉降时,靠近升降机的2只支撑墩作为倾斜板转动时的转动支撑。
2.3 差异沉降控制板
地基差异沉降的模拟是通过沉降控制板的不均匀沉降实现(图4)。为了方便填筑模型,防止在填筑夯实过程中填土从缝隙中漏出,沉降控制板满布于模型箱平面,在和模型箱壁接触处均先在沉降板上粘贴一面带毛的海绵条,同时在模型箱的侧壁涂抹硅油,用以减小沉降板和侧壁的摩擦。沉降板与不动板紧密靠拢,接触处也涂抹硅油,以减小沉降板沉降时的摩擦,同时防止试验过程中沉降板沉降时路堤填料从从缝隙中漏出。
差异沉降控制装置允许的最大差异沉降值,除受升降机行程的限制外,也受沉降板及不动板接触处的厚度控制。试验过程中的最大差异沉降值不宜大于沉降板和不动板的厚度25mm。
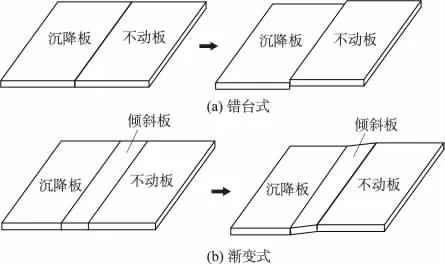
图4 差异沉降控制板示意图Fig.4 Schematic diagrams of differential settlement control boards
2.4 试验测量
地基差异沉降对路堤的影响主要体现在路基面的不均匀变形。试验测量主要以沉降板及不动板交接处在模型顶面的投影为对称轴线,沿模型顶面纵向对称布置位移传感器。在路堤填土的纵剖面也设置了相应的测试标记点。同时在沉降板底部中心位置安装1只位移传感器,用来监测沉降板的沉降。
3 使用方法及步骤
路堤地基差异沉降控制装置的使用方法及步骤为:
(1)确定位移控制系统驱动源的最大扭矩大于使用扭矩的2倍;
(2)安装差异沉降控制装置,并控制电机动作消除系统回差;
(3)在差异沉降控制板上填筑路堤模型;
(4)当离心机运转达到试验要求后,在步进电机控制器中输入拟给定沉降量对应换算的步进数,启动电机带动升降机使差异沉降控制板产生差异沉降,完成一次沉降模拟。模型填土稳定一段时间后,再次输入拟给定沉降量对应换算的步进数并启动电机。如此反复即可实现地基差异沉降逐步发展的全过程模拟。
4 使用实例
采用研制的装置行了3组不同高度路堤的地基错台式差异沉降离心模型试验,模拟的原型路堤高度分别为3,6,9 m,模型比例为40∶1。路堤填料为级配砂,筛分试验数据如表1所列,不均匀系数Cu为5,曲率系数为1.25,颗粒密度为2.77 g/cm3,最佳含水率为12%,最大干密度为1.86 g/cm3,内摩擦角为36.6°,黏聚力为29.3 kPa,3 组模型的压实系数均为0.95。
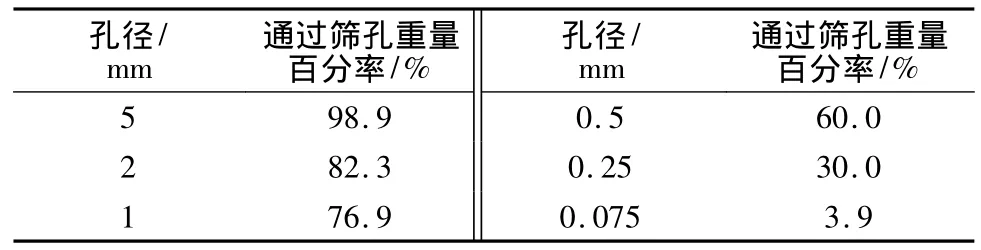
表1 级配砂颗粒分析Table 1 Analysis of the particle size of graded sand
试验所用模型箱内部尺寸为800mm×600mm×600mm(长×宽×高),沉降板及不动板尺寸均为395mm×595mm×25mm。路堤模型满铺模型箱,堤高度为3,6,9 m 对应的模型高度分别为75,125,225mm,路堤模型分层填筑每层20mm。
路堤高度最高为9 m时,在40 g离心加速度下,考虑一半模型随沉降板一起沉降,计算得到的使用扭矩为26.04 N·m,2倍使用扭矩为52.08 N·m,小于系统提供的最大扭矩150.59 N·m。因此,驱动源提供的扭矩足够驱动沉降板沉降。在不动板及沉降板接缝对应的模型顶面左右共布设8~12支位移传感器,同时在沉降板板底中心位置安装1只位移传感器。
试验中步进电机经过细分后达到1 000脉冲/转,脉冲频率设定为4 000 Hz,对应电机的转速为240 r/min,位移控制系统总的减速比为40∶1,升降机的法兰盘每上升(下降)0.21mm需要40×103个脉冲。
离心加速度达到40 g并运行5 min后路堤模型趋于稳定,路堤模型稳定后,启动电机带动沉降板沉降,每次给定位移0.525mm(原型位移21mm),对应100×103个脉冲。沉降完成并运行约5 min后,给定下一级沉降,依次逐级给出地基差异沉降,图5给出了地基差异沉降历程曲线。图6给出了地基差异沉降测试值与步进电机给定沉降之间的关系,从图中可以看出,位移控制系统给定沉降值与均匀沉降端测试值及沉降板底的位移计测试值基本一致,说明位移控制系统的精度非常高,位移控制系统准备可靠。
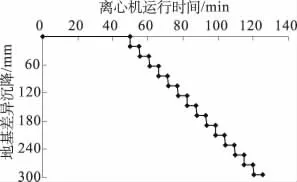
图5 地基差异沉降历程曲线Fig.5 History curve of differential settlement of embankment foundation
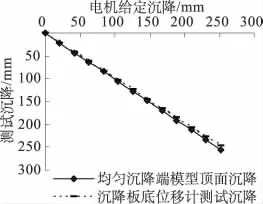
图6 沉降测试值与电机给定值的关系Fig.6 Relationship between the settlement test value and the value given by the stepping motor
图7给出了不同高度路堤试验前后的照片,从图中可以看出试验完成后沉降侧发生明显的下沉,错动处出现了裂痕。图8给出了不同高度路堤试验测得的路基面不均匀变形随地基差异沉降的变化曲线。从图中可以看出随着地基差异沉降的增大,路基面的不均匀变形也随之增大;在路堤高度较低时,沉降部分对未沉降部分的影响范围较小,随路基高度增加沉降部分对未沉降部分的影响范围也随之增大,引起的路基面不均匀变形的斜率也随之减小。

图7 离心试验前后照片Fig.7 Photos of embankments before and after the test
路基面的不均匀变形主要引起轨道的长波不平顺,在较大的范围内路基面不均匀变形引起的斜率就是轨面的弯折角。地基差异沉降引起的路基面不均匀变形的形态均为S型,采用Boltzmann反曲函数对试验测试的路基面不均匀变形进行拟合具有较好的拟合相关性,四参数的Boltzmann反曲函数表达式为

式中:A1,A2分别为自变量沿负向与正向的渐近值;x0为函数拐点横坐标;d x为引起函数显著变化的自变量范围。图9为地基差异沉降21mm时路基面不均匀变形的Boltzmann函数拟合曲线。

图8 路基面沉降随地基差异沉降的变化Fig.8 Variation of subgrade surface settlement with the differential settlement of embankment foundation
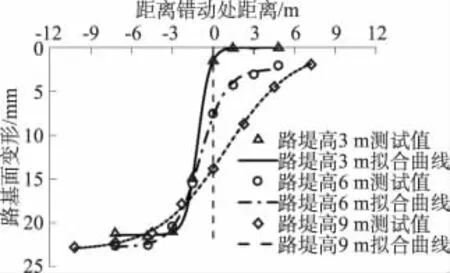
图9 路基面不均匀变形拟合曲线(差异沉降21mm)Fig.9 The fitting curves of uneven deformation of the subgrade surface when differential settlement value is 21mm
路基面不均匀变形斜率的确定可通过拟合曲线上不同点的斜率求得,定义拟合曲线上最大斜率为错台式差异沉降造成的路基面不均匀变形折角,最大斜率点的斜率kmax计算公式为式(4)。此时的折角是斜率的最大值,偏于安全。

对不同的地基差异沉降数值,引起的路基面不均匀沉降曲线通过Boltzmann函数进行拟合,图10给出不同路堤高度时路基面折角与地基差异沉降的关系,由图可以看出路基面不均匀变形斜率与地基差异沉降的相关性很好,基本都成线性关系,随地基差异沉降增大,路堤高度越高时路基面不均匀变形斜率增量越小,可见地基差异沉降在高路堤内的扩散没有低路堤明显。图11给出一定路基面折角限制下,地基差异沉降与路堤高度的关系,由图可以看出在相同的折角限制下,路堤高度越高地基差异沉降允许值越大。

图10 路基面折角与地基差异沉降的关系Fig.10 The relationship between subgrade surface deflection angle and differential settlement of embankment foundation
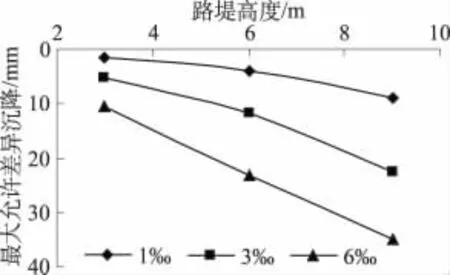
图11 地基最大允许差异沉降与路堤高度的关系Fig.11 Relationship between the maximum allowable differential settlement and the height of embankment
5 结语
(1)根据路堤地基差异沉降特性建立了错台式和渐变式2种地基差异沉降模式,设计并加工了一套模型试验控制装置,实现了不同类型地基差异沉降的离心模拟。
(2)在离心机运转过程中,通过设在离心机外部的控制器控制步进电机动作,驱动升降机升降带动沉降板沉降模拟地基的差异沉降,多次控制沉降板变形可以进行地基差异沉降全过程的模拟。
(3)错台式地基差异沉降引起的路基面不均匀变形均呈S型,路基面不均匀变形的斜率与地基差异沉降幅值基本成线性关系,路堤高度越高地基差异沉降对路基面不均匀变形影响越小。当路基面不均匀变形的斜率限制相同时,路堤高度越高,地基差异沉降允许值越大。
[1]蔡成标,翟婉明,赵铁军,等.列车通过路桥过渡段时的动力作用研究[J].交通运输工程学报,2001,1(1):17-19.(CAI Cheng-biao,ZHAI Wan-ming,ZHAOTiejun,et al.Research on Dynamic Interaction of Train and Track on Roadbed-Bridge Transition Section[J].Journal of Traffic and Transportation Engineering,2001,1(1):17-19.(in Chinese))
[2]翟婉明,蔡成标,王其昌,等.列车提速对线路的动力影响研究与对策[J].中国铁道科学,2000,21(3):11-30.(ZHAI Wan-ming, CAI Cheng-biao, WANG Qichang,et al.Dynamic effects of speed-raise train on track and the countermeasures[J].China Railway Science,2000,21(3):11-30.(in Chinese))
[3]韩自力.既有线提速路基的对策研究[J].中国铁道科学,2000,23(2):53-58.(HAN Zi-li.Research on the Countermeasure of Railway Subgrade on Existing Railways[J].China Railway Science,2002,23(2):53-58.(in Chinese))
[4]马伟斌,韩自力,朱忠林.高速铁路路桥过渡段振动特性试验研究[J].岩土工程学报,2009,31(1):124-128.(MA Wei-bin,HAN Zi-li,ZHU Zhong-lin.Vibration Characteristics of High Speed Railway’s Bridge-Subgrade Transition Section[J].Chinese Journal of Geotechnical Engineering,2009,31(1):124-128.(in Chinese))
[5]TB10621-2009,高速铁路设计规范(试行)[S].(TB10621-2009,Code for High Speed Railway Design(Trial)[S].(in Chinese))
[6]罗 强.高速铁路路桥过渡段动力学特性分析及工程试验研究[D].成都:西南交通大学,2003.(LUO Qiang.Dynamic Performance Analyses and Experiment Study on Bridge/Approach Embankment of High-Speed Railway[D].Chengdu:Southwest Jiaotong University,2003.(in Chinese))
[7]濮家骝.土工离心模型试验及其应用的趋势[J].岩土工程学报,1996,18(5):96-98.(PU Jia-liu.Geotechnical Centrifuge Model Test and Its Application Development[J].Chinese Journal of Geotechnical Engineering,1996,18(5):96-98.(in Chinese))
[8]白 冰,周 建.土工离心模型试验技术的一些进展[J].大地观测与土工测试,2001,25(1):36-39.(BAI Bing,ZHOU Jian.Some Advances in Geotechnical Centrifuge Model Test Technology[J].Dam Observation and Geotechnical Tests,2001,25(1):36-39.(in Chinese))
[9]羊 晔,刘松玉,邓永锋,等.软土地基过渡段差异沉降控制标准[J].东南大学学报,2008,38(5):834-838.(YANGYe,LIU Song-yu,DENGYong-feng,et al.Differential Settlement Controlling Criteria of Highway Transition Sections on Soft Soil Foundation[J].Journal of Southeast University,2008,38(5):834-838.(in Chinese ))
