汽车电磁阀式半主动悬架控制系统设计
2012-10-25唐希雯王洪成孙保群
夏 光, 唐希雯, 王洪成, 孙保群
(1.合肥工业大学 机械与汽车工程学院,安徽 合肥 230009;2.合肥工业大学 汽车工程技术研究院,安徽 合肥 230009;3.电子工程学院 信息系,安徽 合肥 230037)
0 引 言
电磁阀式减振器是一种通过先导式比例电磁阀改变节流孔开度来实现连续阻尼调节的新型可变阻尼减振器,具有结构简单、响应迅速、性能可靠和易于工程实现的特点,且能取得与主动悬架相近的控制效果,从而成为目前实用化可变阻尼减振器的的发展方向[1-3]。
关于连续阻尼可调半主动悬架的控制方法很多,控制算法也越来越复杂[4-7],但是这些控制算法的实际可操作性越来越差,同时也带来了复杂算法的响应时滞。
1 电磁阀式减振器结构与工作原理
本文针对电磁阀式阻尼连续可调半主动悬架进行了控制系统的硬件电路和软件系统设计,采用工程易于实现且鲁棒性较强的skyhook控制策略,并将自主开发的控制系统装车进行了实车道路试验。
电磁阀式减振器可在普通双筒式减振器基础上改进而来,相比于普通双筒式减振器,其结构上增加了一个中间缸和一个电磁阀。中间缸和工作缸上腔相通,电磁阀连接中间缸和储油缸,电磁阀控制中间缸与储油缸之间的节流通道,从而实现阻尼的连续可调[8]。
电磁阀式减振器的工作原理如图1所示,相比于普通双筒式减振器,其增加了一个电磁阀控制的节流通道,包含和上腔相通的中间缸和电磁阀,通过电磁阀对节流通道的开度调节来实现减振器阻尼连续可调。

图1 电磁阀式减振器工作原理图
电磁阀式减振器工作过程可分为复原行程和压缩行程。
1.1 复原行程
活塞杆相对工作缸向上运动,上腔体积变小,上腔和中间缸油液压力增大。
(1)上腔油液通过活塞总成上的阀系流到下腔。
(2)补偿腔油液通过底阀总成上的阀系流到下腔。
(3)中间缸的油液通过电磁阀控制的节流通道流到补偿腔。
1.2 压缩行程
活塞杆相对工作缸向下运动,下腔体积变小,下腔油液压力增大。由于流通阀开启压力小,仅相当于单向阀的作用,故下腔与上腔压力相差不大。油液流动路径为:
(1)下腔油液通过活塞总成上的阀系流到上腔。
(2)下腔油液通过底阀总成上的阀系流到补偿腔。
(3)中间缸的油液通过电磁阀控制的节流通道流到补偿腔。
2 系统硬件电路设计与实现
硬件设计主要是电子控制单元的硬件电路设计,其结构框图如图2所示,它表明了电磁阀式半主动悬架控制系统的基本电路结构及工作过程。

图2 控制系统的结构示意图
系统采用ARM7系列支持实时仿真和跟踪的16/32 位 ARM7TDMI-S CPU 的 微 控 制 器LPC2292作为控制器的核心单元,可提高运算速度,特别适用于汽车、工业控制应用[9]。
硬件电路主要包括单片机和最小系统电路、点火系统供电电路、车身和车轮垂直加速度信号调理电路、车速信号调理电路、电磁阀驱动电路、CAN通信电路和故障诊断通信电路。
3 系统软件设计
3.1 系统控制策略
skyhook阻尼控制策略基本思想可表述为:当簧载质量的绝对速度和簧载质量与非簧载质量的相对速度一致时,减振器抑制簧载质量的运动,并产生与簧载质量匹配的阻尼力。考虑到可变阻尼减振器的阻尼调节范围,当其不能满足等于理想阻尼力时,产生最大阻尼力;当簧载质量的绝对速度和簧载质量与非簧载质量的相对速度反向时,减振器不抑制簧载质量的运动,减振器产生的阻尼力尽可能的小。
理想skyhook阻尼控制模型代表一种悬架阻尼控制思想,在实际中并不能完全实现[10],可以通过可变阻尼减振器在一定范围内等效实现skyhook阻尼控制,等效模型如图3所示。

图3 等效skyhook阻尼控制模型
图3中各位移、速度向上为正。簧载质量与非簧载质量相对速度记为vbw,定义两者相互分开方向为正,相互接近方向为负。
等效的skyhook阻尼控制模型为:


其中,Fd为可变阻尼减振器产生的阻尼力,Fd=40 000N/m;kt=350 000N/m;Cs=1 360N·s/m;Csky=4 000N·s/m;Cdmax为减振器最大阻尼系数,Cdmax=5 440N·s/m;Cdmin为减振器最小阻尼系数,Cdmin=1 360N·s/m。
可变阻尼减振器阻尼系数Cd可按(3)式计算:

3.2 仿真分析
假定汽车在B级路面上以60km/h的车速行驶,路面输入模型为:

其中,x0(t)为路面不平度位移;f0为下截止频率,一般取0.062 8;Gq(n0)为路面不平度系数;u为车速;ω(t)为均值为零的高斯白噪声[11]。在此路面输入下,等效skyhook阻尼控制模型与被动悬架模型的车身垂向加速度对比如图4所示。
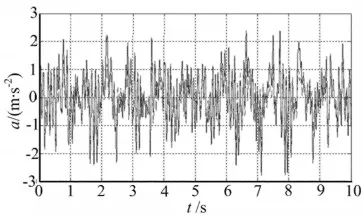
图4 时域仿真结果对比
图4中,实线为被动悬架模型的车身垂向加速度时域曲线,虚线为等效skyhook阻尼控制模型的车身垂向加速度时域曲线。
以车身垂向加速度均方根值为评价指标,对比分析B级路面输入与E级路面输入下skyhook阻尼控制策略的有效性,见表1所列。仿真结果表明,在B级路面输入下,skyhook阻尼控制模型相比于被动悬架模型车身垂向加速度均方根值减小了32.3%;在E级路面输入下,skyhook阻尼控制模型相比于被动悬架模型车身垂向加速度均方根值减小了32.4%。

表1 仿真结果均方根值对比
3.3 系统软件实现
(1)首先采集车速信号,对车速信号进行判断。如果车速大于100km/h,为保证车辆高速行驶稳定性,则系统设置为运动模式,减振器设置为大阻尼状态,即输出给减振器电磁阀小电流(0.25A);如果车速小于100km/h,进入下一步。
(2)根据车速信号计算汽车当前加速度值,通过加速度判断驾驶员当前驾驶偏好。如果加速度绝对值大于5m/s2,表明驾驶员驾驶偏向于运动性,则系统设置为运动模式,减振器设置为大阻尼状态,即输出给减振器电磁阀小电流(0.25A);如果加速度绝对值小于5m/s2,即当前驾驶员偏向于其他模式,进入下一步。
(3)对驾驶员选择的驾驶模式进行检测。如果选择的是舒适模式,则减振器设置为阻尼状态,输出给减振器电磁阀大电流(2A);如果选择的是运动模式,则减振器设置为大阻尼状态,即输出给减振器电磁阀小电流(0.25A)。如果选择的是正常模式,则采集并处理各传感器信号,然后根据控制策略计算出目标阻尼力,并根据目标阻尼力计算应当输出的最佳电流。
控制系统主程序流程如图5所示。

图5 系统主程序流程图
4 实车试验
进行试验的目的是为了验证所设计的控制系统对汽车行驶平顺性的有效性。试验方法主要是实车道路试验,试验车辆为安装有电磁阀式减振器及控制系统的奇瑞G6轿车,如图6所示。

图6 试验车辆
根据文献[12-13]进行实车道路试验,试验方法如下:
(1)分别在空载和满载的条件下,路面的激励分别为过凸块的脉输入和随机输入激励,测量车身各点三向加速度。
(2)在车辆安装电磁阀式半主动悬架和被动悬架的2种条件下,车速分别为40、60、80km/h,按照方法(1)的要求进行试验,并对结果进行比较。
试验结果见表2和3所列,在不同条件下,采用电磁阀式半主动悬架控制器的汽车比采用普通被动悬架的汽车车身垂直加速度均方根值减小11%~23.5%。

表2 空载随机路面时各点均方根值结果(被动/电磁阀式半主动悬架) m/s2

表3 满载随机路面时各点均方根值结果(被动/电磁阀式半主动悬架) m/s2
采用自行开发的电磁阀式半主动悬架控制器的车辆,在不同条件下都能够有效地降低整车的垂直加速度,明显优于普通被动悬架,也证明所采用的控制策略是可行的。
5 结束语
本文采用鲁棒性较强且工程易于实现的skyhook控制策略,建立等效的skyhook阻尼模型并进行仿真分析,仿真结果表明采用skyhook控制策略的电磁阀式半主动悬架明显优于传统被动悬架。
通过实车试验,有效验证了控制策略的正确性。由此说明,所设计的电磁阀式半主动悬架控制器和采用的控制策略是正确可行的,可有效改善整车行驶平顺性[14-15]。
[1] 林 榆 馨.电 子 控 制 悬 架 的 应 用 [J].上 海 汽 车,1996(4):136-157.
[2] 郭洪文.NJ2045越野车可调减振器的研制和半主动悬架设计[D].长春:吉林大学,2004.
[3] 李仕生.汽车可变阻尼减振器研究[D].重庆:重庆大学,2006.
[4] 夏 光,唐希雯,汪韶杰,等.汽车磁流变半主动悬架控制系统设计[J].合肥工业大学学报:自然科学版,2010,33(12):1765-1769.
[5] Soliman A M A.Improvement of vehicle ride performance using a switchable damper suspension system[C].//SAE World Congress & Exhibition,Detroit,MI,USA,2007:580-588.
[6] 董小闵,余 淼,廖昌荣,等.汽车磁流变半主动悬架自适应 模 糊 控 制 研 究 [J].中 国 公 路 学 报,2006,19(2):111-115.
[7] 陈无畏,王志君,范迪彬.汽车半主动悬架的神经网络自适应控制[J].汽车工程,1998,20(1):31-36.
[8] Park K,Kim J,Kim D.A study on the dynamic characteristics of the continuously variable shock absorber for semiactive damping control system[C]//SAE 2005World Congress & Exhibition,Detroit,MI,USA,2005:1711-1719.
[9] 周立功.ARM嵌入式系统基础教程[M].北京:北京航空航天大学出版社,2005:201-267.
[10] Karnopp D,Crosby M J,Harwood R A.Vibration control using semi-active force generator[J].ASME Journal of Engineering of Industry,1974:619-626.
[11] 陈杰平.基于 MATLAB/SIMULINK的随机路面建模与不平度仿真[J].农业机械学报,2010,40(3):11-15.
[12] GB/T 4970-1996,汽车平顺性随机输入行驶试验方法[S].
[13] GB/T 5902-86,汽车平顺性脉输入行驶试验方法[S].
[14] Crolla D,喻 凡.车辆动力学及其控制[M].北京:人民交通出版社,2004:57-98.
[15] 余 志 生.汽 车 理 论 [M].北 京:机 械 工 业 出 版 社,2000:80-96.
