汽车道路综合试验系统数据采集与处理
2012-10-25滕艳琼徐延海孙泽海
滕艳琼,徐延海,唐 岚,孙泽海
(西华大学交通与汽车工程学院,四川 成都 610039)
0 引 言
目前使用的汽车性能道路试验仪器和试验系统大多基于光学速度传感器以及机械陀螺仪进行开发,无论在功能上还是使用上都存在很大的局限性,不能获得精度较高的汽车行驶轨迹,易受路面条件干扰,使用安装复杂,便携性差且测量参数种类有限等;因此,有必要研制一套便携性强、安装方便且测试精度高的汽车综合性能道路试验系统。本团队从2007年开始着手研制基于Windows CE的便携式汽车综合性能测试系统,2009年完成基本调试,经过3年多在教学实验中不断的完善和修改,目前该测试系统运行稳定,能用于车辆的道路试验。
1 系统总体功能分析
根据汽车道路试验方法通则的要求[1],实现对GPS、XW-AHRS 5100及AM-2012转向力角测试仪的数据同步采集,通过相关的算法进行计算和处理获得汽车道路试验所需的物理参数,构建相应的试验项目。系统应具有如下功能:(1)试验过程直观性强,能够实现试验数据的接收、计算、分析和绘图,实时显示行驶距离、速度、加速度等动态参数,观察到汽车真实的运行轨迹及试验数据变化的趋势和特征,并显示汽车的轨迹;(2)动态绘制试验数据曲线,系统能与数据采集同步显示波形;(3)实现对试验数据的保存,能够以文件形式保存移动站GPS接收机原始数据和试验结果,以便试验后的进一步分析和处理;(4)试验参数设置直观灵活,试验人员可以自行设置试验参数[2],能够很好地适应新标准的变化要求,测控精度高、可靠性好。
2 硬件组成
根据GB/T 12534-1990《汽车道路试验方法通则》所要求的测量参数,构建测试系统的硬件系统。硬件连接图如图1所示。
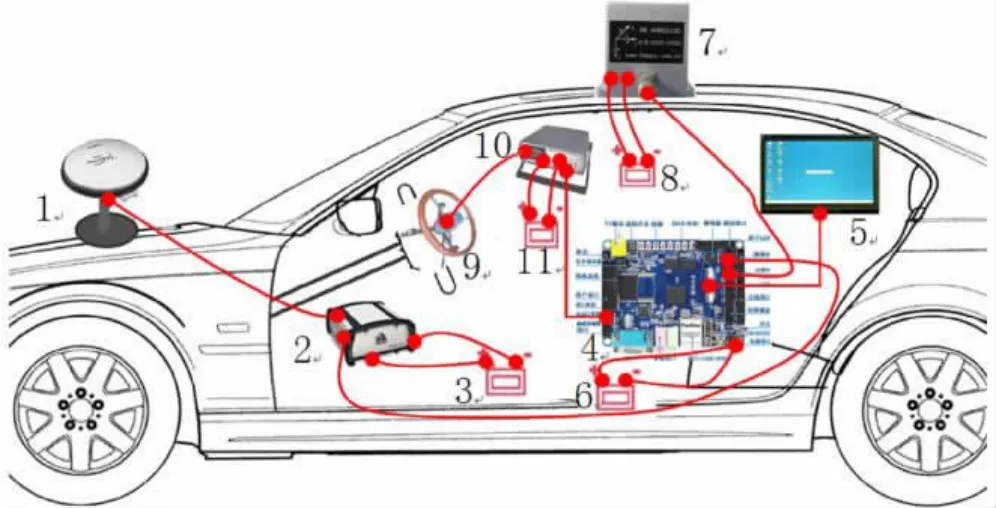
图1 测试系统的硬件连接
测试系统硬件部分主要包括GPS测量系统[3-4]、姿态航向参考系统XW-AHRS 5100、转向力角测试仪AM-2012、OK6410 ARM11开发板及触摸显示屏等。GPS在卫星信号良好的情况下,其单点定位准确度可以达到2m,测量准确度能达到6cm,如果使用差分定位其准确度能提高到0.45m,测试准确度能达到2mm。XW-AHRS 5100测量的角度、角速度和加速度准确度可达到 1.5°、0.8°/s、5 m/s2。AM-2012 的转力和转角的测量准确度可达到2N和4°,这些仪器的性能完全满足试验精度要求。从测试系统的便携性和操作上考虑,测试系统选用了OK6410 ARM11开发板以及触摸显示屏作为系统的硬件平台[5-6]。
3 软件设计
根据测试系统的要求,试验项目中所需采集数据有汽车车速、行驶轨迹、距离、姿态角、加速度、角速度、转向盘转力、转角以及试验时间。软件流程设计如图2所示。
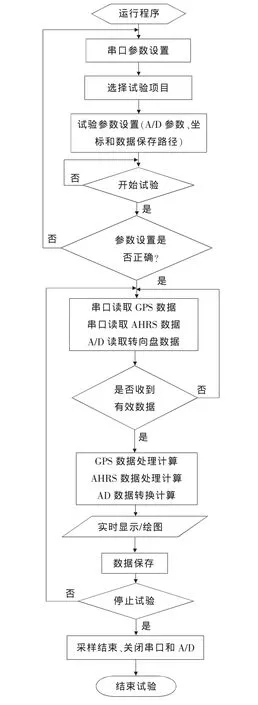
图2 软件流程图
运行试验程序,进入试验主界面,首先进入串口设置,对GPS和XW-AHR S5100串口通信参数进行设置,完成后选择所需进行的试验项目,进入各试验项目界面。进入界面后对试验参数进行设置,如A/D参数(通道、偏置电压等)、试验数据保存路径、坐标、试验条件等。设置完成后单击开始试验按钮,先判断参数设置是否正确,比如串口的波特率、奇偶位和A/D通道等,若设置不正确,返回主界面,重新进行设置;若设置正确,则开始试验。
试验过程中程序会通过串口采集GPS、XW-AHRS 5100的数据,GPS数据采集程序流程图见图3。通过A/D读取转向盘转角和转力,对所读数据进行处理计算,获得汽车的试验项目所需的物理量,并对所获得的物理量进行坐标转换,转换成绘图所需的坐标值,然后实时显示试验中物理参数的瞬时值并绘制曲线,最后保存试验数据,保存的数据用于数据后处理和对试验过程中汽车的各种性能的分析。当试验完成,点击“停止试验”按钮,试验停止,其中有部分试验通过设置试验条件自动停止试验。
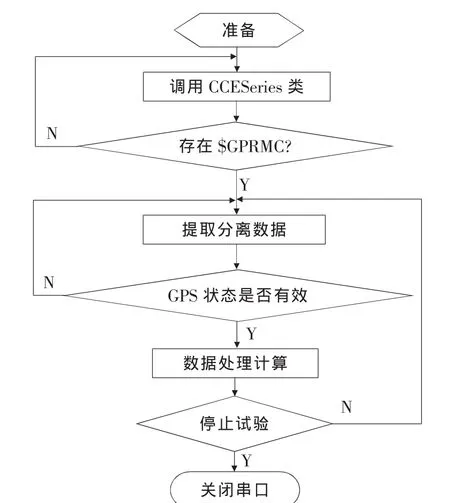
图3 串口接收GPS数据流程图
4 汽车动态参数的测量与计算
汽车运动学参数主要包括质心运行轨迹和车身姿态,对其表述需要定义坐标系,并定义主要的运动学参数[7],如图4所示。图4(a)给出3个姿态角定义,即航向角h、侧倾角φ和俯仰角θ,图4(b)给出了大地坐标系和汽车轨迹、汽车方位角ψ、汽车侧偏角 β、行进方向角(ν=ψ+β)的定义。
本文研究的测试系统所选用的惯性测量单元为AHRS,采用高可靠性和稳定性的MEMS传感器,能较精确获得动态测量和导航所需的姿态角、加速度等运动参数。利用这种方法可以精确测量得到汽车的轨迹、姿态、质心侧偏角,以及运动坐标系和车体坐标系下的线(加)速度、角速度等重要的运动学参数。
根据GPS经过串口传送的信号,可以得到汽车在任意时刻的基于WGS-84世界大地坐标系的经纬度(B,L)观测值,再按照高斯-克吕格变化将WGS-84坐标变成平面直角坐标(x,y),这样就可以在软件中实现车辆轨迹的再现。同时根据汽车在转换后的平面直角坐标系中的参数,通过相应的运算得到汽车的纵向和侧向速度以及加速度等动态参数。基于GPS的定向接收设备直接对汽车方位角测量。从GPS接收机输出数据中可提取出车速νC、车速方向角α和车体航向角 h,如图 4(b),则 β=h-a,ψ=n/2-h。

图4 汽车运动学参数示意图
5 实车试验
该道路试验系统能进行整车动力性中的最低稳定车速、最高车速试验、起步连续换挡加速试验、最高挡和次高挡加速试验、滑行试验、制动性能试验,以及操纵稳定性试验中的稳态回转试验、蛇形试验、转向轻便性试验、转向盘转角阶跃输入试验这4项主要试验项目。
图5为本文基于Windows CE硬件平台[8-9],ARM为开发板的便携式触摸屏,屏幕显示的是正在进行的最低稳定车速试验界面。试验前,连接好各测试仪器和硬件,通过GPS命令发送窗口,设置GPS采样频率,发送命令,检查测试系统工作是否正常。试验时,选定一段不小于50 m的试验路段,并且两端有足够的准备距离。将汽车挡位置于要求挡位,让汽车保持一个很低的能稳定行驶的车速通过测试路段,然后迅速踩下加速踏板,同时保证汽车不出现传动系颤抖和发动机熄火,并能平稳加速,满足上述要求则为汽车最低稳定车速[10]。测试系统试验时,在交互操作界面上根据需要设置数据保存路径、试验距离以及坐标,本次试验时设置的测试距离为100m。

图5 最低稳定车速试验界面
图6为试验过程中汽车行驶轨迹,可以看出测试系统测得汽车行驶轨迹与汽车实际行驶轨迹是一致的。图7为试验时汽车速度随时间变化的曲线,图8为汽车行驶距离随时间变化的曲线,其中实线为本文研究的测试系统测得数据,虚线为AM-2600测试系统测得数据。
分析图7可知,本次研制的测试系统所测得的速度变化趋势和采用光电式传感器AM-2600汽车道路试验系统所测得的速度变化情况基本一致,并且和汽车试验过程中所观测的速度变化情况相同。由图8可见两者所测得距离也基本相同。由此可以说明本次研究的测试系统能准确、实时获得汽车的行驶轨迹、车速和行驶距离。
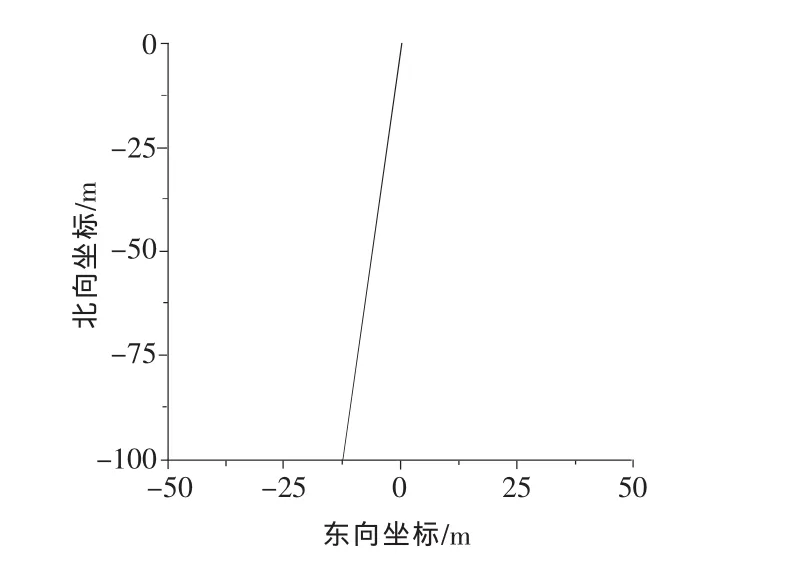
图6 车辆轨迹图

图7 速度-时间曲线

图8 距离-时间曲线
由于GPS与光电式传感器相比,安装简单可靠,且不受路面干湿状态的影响,因此由图8的对比数据可以看出本文研究的测试系统所测得的速度比AM-2600测试系统测得的速度曲线要光平滑平顺。
6 结束语
利用Windows CE系统多线程技术实现了多传感器的同步采集和处理,通过实车试验对所研究的测试系统进行了验证,并根据相应的国家标准完成了主要的汽车试验项目。试验结果表明该测试系统能实时可靠地获得汽车性能试验所需要的测试参数。测试系统的显示采用了触摸显示屏,具有很好的操作性,且硬件平台体积小,具有较好的便捷性。通过与主要采用光电式传感器为元件的商用仪器AM-2600汽车性能测试系统进行对比试验,证明了该测试系统设计的合理性,具有一定的工程应用价值。
[1]GB/T 12534—1990汽车道路试验方法通则 [S].北京:中国标准出版社,1990.
[2]徐延海,李永生.利用LabVIEW进行基于GPS的汽车道路试验系统的开发[J].机床与液压,2010(4):74-76.
[3]李正航,黄劲松.GPS测量与数据处理[M].武汉:武汉大学出版社,2005:75-129.
[4]刘美生.全球定位系统及其应用综述(二):GPS[J].中国测试技术,2006,32(6):5-11.
[5]易迪华.基于ARM的汽车制动性能检测系统研究[D].北京:中国农业大学,2006:11-34.
[6]OK6410-B开发板硬件手册V2.1.飞凌嵌入式有限公司[Z].2011.
[7]张小龙,宋健,冯能莲,等.汽车道路试验测试方法研究进展[J].农业机械学报,2009(4):38-43.
[8]竺乐庆,张三元,幸锐.基于ARM与WinCE的掌纹鉴别系统[J].仪器仪表学报,2009(9):24-28.
[9]刘庆亮.基于WinCE的GPS手机导游系统的研究[D].长沙:中南大学,2010:4-10.
[10]汽车工程手册编辑委员会.汽车工程手册-试验篇[Z].北京:人民交通出版社,2001:180-220.
