基于数字调节方法的MEMS陀螺零位补偿技术研究
2012-10-21王向军汤其剑
吴 峰,王向军,汤其剑
(1.天津大学精密测试技术及仪器国家重点实验室,天津 300072;2.天津大学微光机电系统技术教育部重点实验室,天津 300072)
MEMS陀螺具有体积小、重量轻、成本低、功耗小及可靠性高等特点,广泛应用于军用和民用领域[1]。但由于其加工材料、工艺水平等的特殊性和局限性,小型化尺寸和构造使其对周围环境的变化很灵敏,这就直接限制了MEMS陀螺在高精度应用领域的使用。随着功耗及外界温度的变化,MEMS陀螺的各项指标,如零漂、刻度因子、灵敏度等都会发生相应改变[2-3]。其中零漂是影响陀螺仪输出精度的主要因素[4-5]。
为了降低温度对MEMS陀螺零位输出的影响,目前国内采用的主要方法为有计划地改变惯性器件测试环境或工作环境的温度,通过大量试验,辨识出惯性器件静、动态温度模型,计算出相应的附加误差,进行实时补偿[6-8]。该方法需要大量时间用于MEMS陀螺恒温,使陀螺内部温度与环境温度一致,这种研究方法效率较低。同时,相邻两个温度点之间需要采用插值或分段补偿的方法建立零漂模型。插值和分段补偿方法均无法准确表达零漂模型,同时插值与分段补偿等手段使得陀螺零位补偿算法复杂化,CPU 占用率高[2,9]。
本文以实验室研制的微小型光电吊舱(<1 kg)陀螺稳定平台为应用背景,以某型硅微机械陀螺为研究基础,采用区别于传统的多点定温测试[10-11]的全温测试方法,提高了建立零漂模型的工作效率;研究出基于数字调节方法的零位补偿技术,降低零位补偿算法对CPU的使用率;最后对该补偿技术进行验证,达到了较好的补偿效果。
1 数字调节电路
与常用的纯软件补偿不同,本文依据陀螺实际应用限制,设计了一种以DSP、数字电位器等为核心的数字调节电路,以软件与硬件相结合的方法实现陀螺零位补偿。
1.1 零位补偿原理
传统的零位补偿方法在准确获得零漂模型的基础上,陀螺实际输出值减去由零漂模型得到补偿值,从而解算出陀螺瞬时速度值。本文通过全温测试实验建立起全温范围内的补偿模型,依据当前温度采集值,求解出当前的零偏值,再通过DSP重写数字电位器输出的补偿值,实现陀螺零偏的电路补偿。
1.2 数字调节电路结构图
如图1虚线框内所示为陀螺零位补偿数字调节模块电路结构图。两路陀螺均为独立模块,其温度信号经低通滤波电路后进行A/D采集,速率信号先进行零位调整电路调整陀螺信号中心零位,再将调整后的陀螺信号进行低通滤波。通过FPGA编写的SPI模块控制A/D采集芯片,并将采集到的陀螺数据存入FPGA内设计的RAM中,待采集满一定数据后触发DSP外部中断。DSP读取FPGA中的数据并进行处理,依据处理数据调整数字电位器输出值。本方案选用MAX5494型数字电位器,MAX5494为双通道、1024线、三端口、非易失电位器,采用SPI接口进行控制。调节电路中,数字电位器以电压形式输出[12]。
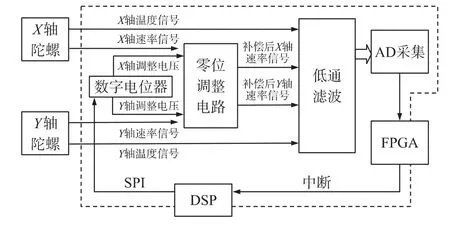
图1 数字调节电路结构图
由于陀螺外围电路及自身特性的差异性,不同陀螺相同温度下零位输出值存在偏差[3]。因此,实用中进行统一零位处理。本电路将数字电位器作为零位调整电路的可变量,数字电位器输出与陀螺速率信号进行差分,再通过一个加法电路,实现陀螺输出信号的零位中心调整。
环境温度变化时,DSP根据陀螺内部温度传感器输出的温度变化,通过SPI调节数字电位器输出,补偿陀螺零位漂移信号;陀螺内部温度达到平衡后,数字电位器保持输出值不变,实现电路对每一个速度值的温度补偿。
2 基于全温测试的零位补偿模型
本文采用全温测试方法,所用MEMS陀螺能同时输出温度信号与速度信号,无需在多个特定温度点长时间保温,只需同时采集陀螺在温度变化过程中温度输出信号与零位输出信号,采用最小二乘算法拟合出零位漂移模型。
2.1 全温测试实验
依据MEMS陀螺在微小型光电吊舱陀螺稳定平台里的应用温度要求,本实验对MEMS陀螺进行-40℃ ~+60℃温度区间的全温测试。采用实验室现有高低温箱(恒温范围-60℃ ~+150℃)进行全温测试。
实验过程:
(1)由DSP设定数字电位器两通道寄存器写入值N=511,数字电位器输出为端电压中心值;
(2)设定高低温箱起始温度为-40℃,同时,陀螺上电保持1 h;
(3)将高低温箱恒温值设成60℃,高低温箱将自动升温,同时PC机开始接收并保存DSP系统上传的陀螺温度与零位数据,每分钟40组,每组数据中X轴与Y轴温度、零位数据各500个;
(4)保持60℃恒温,PC持续接收陀螺数据,从而实现-40℃ ~+60℃全温采集。
实验结束后,选取陀螺从-40℃升温开始后1 h内共2 400组数据建立零漂模型。通过分离每组数据中的X轴和Y轴的温度与零位数据,求平均并分别按时间为横坐标绘制曲线如图2所示。
由图2可推断,X轴与Y轴温度输出信号基本一致,而零位输出存在较大偏差,证明了不同陀螺以及信号调理电路存在差异性和统一中心零位的必要性。
2.2 零漂模型
由于数字调节电路中存在对陀螺速度信号的差分,因而陀螺零位随温度升高而降低。由图2可知,二者间存在一定相关性。本文采用最小二乘方法对X轴、Y轴的温度输出与零位输出分别进行二次拟合,得到拟合曲线如图3所示。
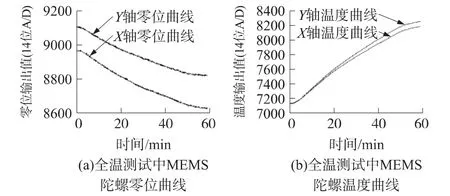
图2 全温测试中零位与温度随时间变化曲线
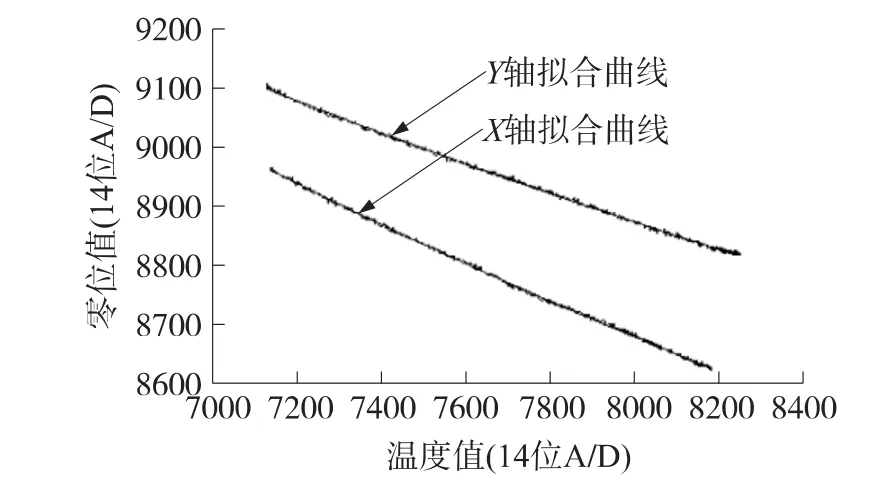
图3 零位随温度变化二次拟合曲线
得到拟合方程分别为:

图3可知,二次拟合曲线基本与实际点重合。因此,可采用二次拟合曲线作为零漂模型。
2.3 零偏—数字电位器调整值模型
式(1)给出了X轴陀螺与Y轴陀螺零位输出与陀螺内部温度之间的关系,由第1节可知,陀螺采用统一零位中心,因此,需要得出零偏值与保持零位稳定时的数字电位器调整值之间的关系模型。由于无法准确获得信号调整电路部分的数学模型,研究中采用软件测试中常用的“黑盒测试”原理,不考虑具体电路的数学模型,只需得出零偏与数字电位器调整值之间的对应关系。
本文设计了以下实验:
(1)取下陀螺模块,采用微调电源模拟陀螺速度信号,以陀螺常温下静止输出电压信号为中心上下调整电源信号,模拟陀螺零位漂移,将电源信号同时连接到数字调节电路中X轴与Y轴陀螺信号输入端;
(2)用微调电源给定陀螺常温下静止输出电压信号,当数字电位器N0=511时,PC机接收A/D采集值,提取X轴与Y轴陀螺信号采集值记为Vx、Vy,保持电源电压不变,通过PC发送串口指令,调整数字电位器N值,使得X轴与Y轴陀螺信号采集值尽可能的接近零位中心值8 200,记录此时的陀螺采集值Vx0,Vy0以及Nx,Ny;
(3)重复步骤(2),改变电源电压,以陀螺常温下静止时输出电压为中心上下各10组共21组,记录各组数据。
实验数据拟合曲线如图4所示。
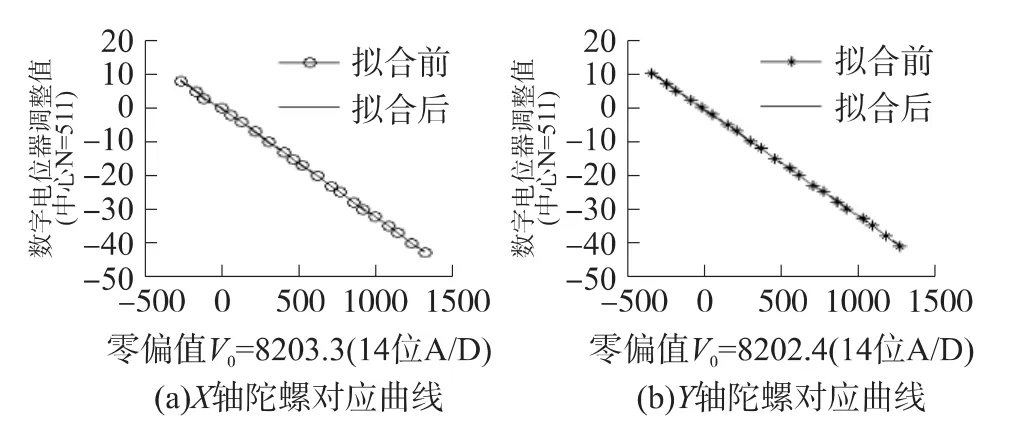
图4 零偏值与数字电位器调整值拟合曲线
由图4可知数字电位器的调整值与电压偏差值具有较好的线性关系。拟合曲线方程为:

其中:

式(2)即零偏—数字电位器调整值模型。
2.4 零位补偿模型
结合式(1)~式(5)可以分别得出X轴与Y轴的零位补偿模型如下:

通过采集陀螺内部温度值,即能求解出数字电位器输出值,再通过DSP的SPI接口将解算得到的输出值分别写入到对应的数字电位器寄存器,实现陀螺零位补偿。
3 温度补偿试验及结果分析
为了验证零位补偿模型的正确性,本节给出了DSP温度补偿流程以及补偿实验,并对实验结果进行分析。
3.1 补偿流程
如图5所示为DSP中温度补偿流程图,补偿过程在外部中断中进行,每采集一定次数后对X轴与Y轴温度信号求一次均值,再分别代入零位补偿模型,解算得出当前数字电位器输出值,当解算值与前一次写入值不相等时,DSP将新值写入数字电位器,同时保存当前值。图中虚线表示该部分为电路调节。
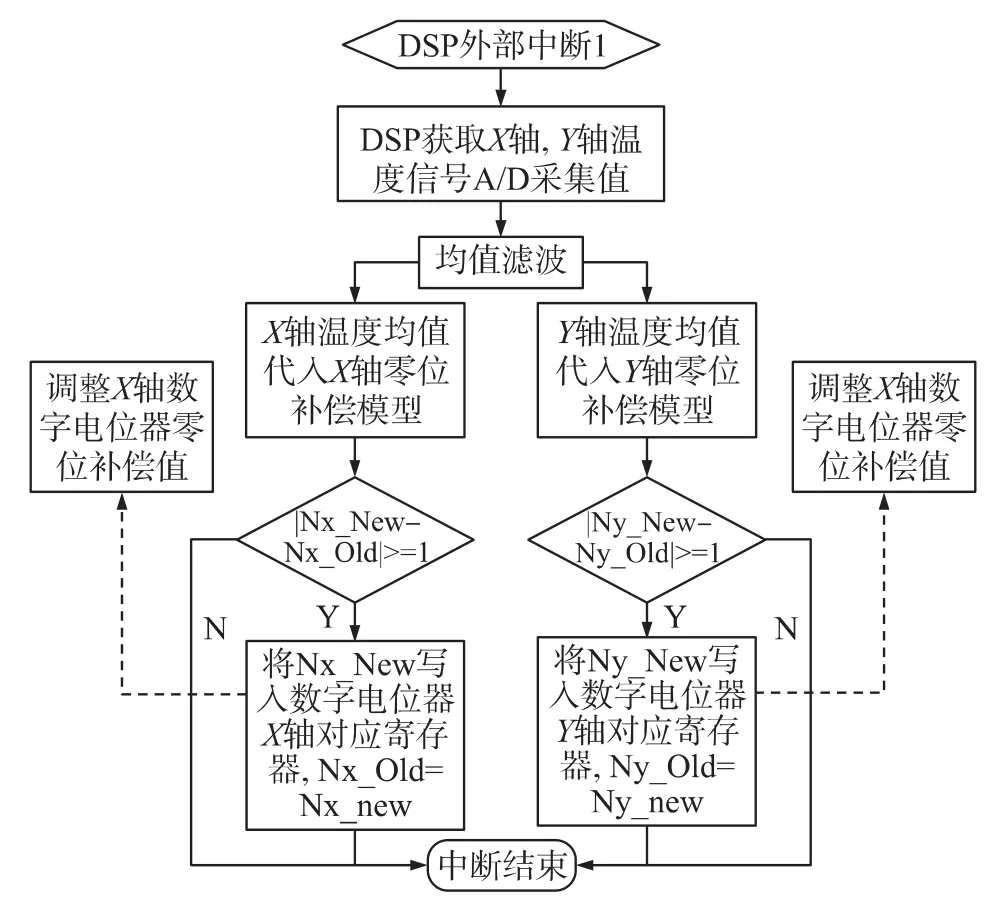
图5 温度补偿流程图
3.2 温度补偿实验
温度补偿实验与全温测试实验条件、步骤相同,设定:X轴陀螺进行温度补偿,Y轴陀螺不进行温度补偿作对比。实验结果如图6所示。
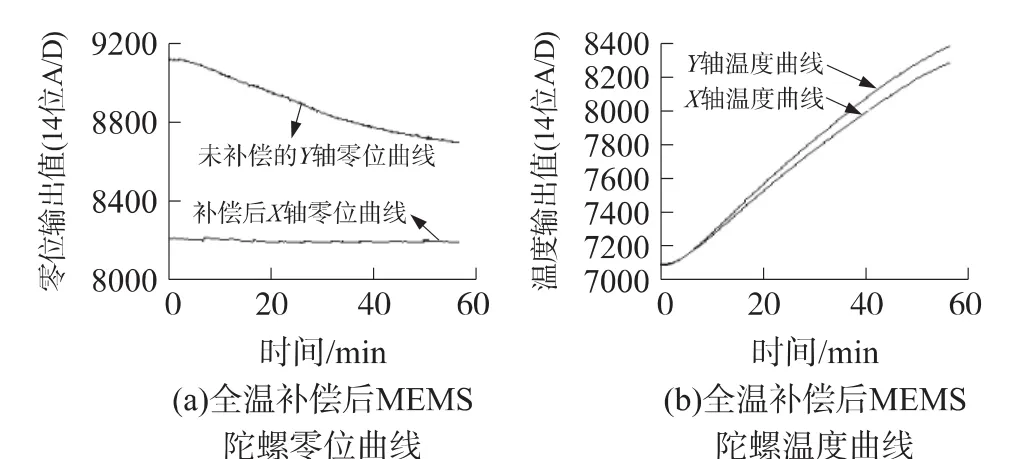
图6 全温补偿实验结果
3.3 实验结果分析
由图6可知,Y轴陀螺在全温范围内变化约400个采集值,由图2可知X轴陀螺与Y轴陀螺在全温范围内变化值相近,而补偿后的X轴在同样的温度变化范围变化小于40个采集值,稳定精度提高10倍以上,达到明显的补偿效果。同时,X轴陀螺零位采集值基本保持在8 200左右,实现了零位中心调整。
4 结论
本文提出的全温零位补偿测试方法不需要在多个特定温度下长时间保温,节省了陀螺零位特性研究的实验时间,提高了实用效率。采用基于数字调节方法的零位补偿技术,软件硬件相结合,有效的补偿了陀螺在全温范围内的零位漂移,同时简化了补偿算法在DSP内的运算过程,具有耗时少、可实现性好及高效等优点。
[1]何昆鹏.MEMS惯性器件参数辨识及系统误差补偿技术[D].哈尔滨:哈尔滨工程大学,2009.
[2]秦伟,苑伟政,常洪龙,等.基于模糊逻辑的MEMS陀螺零漂温度补偿技术研究[J].弹箭与制导学报,2011,31(6):19-22.
[3]陈怀,张嵘,周斌,等.微机械陀螺仪温度特性及补偿算法研究[J].传感器技术,2004,23(10):24-26.
[4]程龙,王寿荣,叶甫.硅微机械振动陀螺零偏温度补偿研究[J].传感技术学报,2008,21(3):483-485.
[5]Michael I Ferguson,Didier Keymeulen,Chris Peay,et al.Effect of Temperature on MEMS Vibratory Rate Gyroscope[C]//Aerospace Conference,2005 IEEE,5-12 March 2005,1-5.
[6]许德新,何昆鹏,梁海波.MEMS惯性测量组件的温度误差补偿模型研究[J].哈尔滨工程大学学报,2010,31(5):607-613.
[7]罗兵,吴美平,尹文,等.微机械陀螺温度系数的快速标定方法[J].传感技术学报,2010,23(10):1444-1448.
[8]罗兵,尹文.微机械陀螺零偏温度梯度建模[J].电光与控制,2008,15(11):29-31.
[9]夏敦柱,王寿荣,周百令.硅微陀螺仪零偏温度性能补控方法设计[J].东南大学学报,2012,42(2):290-294.
[10]满海鸥,肖定邦,吴学忠,等.基于驱动频率的硅微陀螺零偏补偿方法研究[J].传感技术学报,2012,25(5):624-627.
[11]温佰仟.微小型MEMS陀螺的误差特性研究[D].南京:南京航空航天大学,2008.
[12]MAX5494ETE[G].Maxim Integrated Products,19-3562,Rev 1,6/05.
