机床导轨技术研究综述*
2012-10-20屈重年伍良生肖毅川张仕海
屈重年 伍良生 肖毅川 张仕海
(北京工业大学机械工程及应用电子技术学院,北京 100124)
装备制造业是为国民经济各行业提供技术装备的战略性产业,素有“工作母机”之称的机床更是具有举足轻重的作用,从“十一五”开始,我国为加快重大关键技术攻关和重大创新产品集成创新,开始实施“高档数控机床与基础制造装备”等重大专项。在“十二五”规划中,更是提出了以高档数控机床等基础装备和国民经济相关行业所需的重大专用装备为重点的发展思路。
机床从发明之日起,导轨技术就是其核心技术之一。从导轨技术的发展历程来看,经历了滑动导轨、滚动导轨、液体/气体静压导轨、复合导轨和磁浮导轨等阶段。这些导轨技术的发展并不是简单的一种技术取代另一种技术的发展,而是在相当长的时间内并存并相互推动。例如,虽然直线滚动导轨经过长时间的发展,有了长足的进步,但从优良的刚性和阻尼特性以及经济性能来看,仍然不能完全取代传统的滑动导轨;其发展的一个必然趋势是与滑动导轨技术相结合而产生的复合导轨,以解决其刚度、阻尼等方面的劣势。
随着现代制造业的发展,对高速、高精密数控机床的需求日益增加。同时随着新材料科学以及电子与控制技术科学的发展,对机床导轨技术的研究集中在两个大的方向:一是针对新型功能性材料滑动导轨的基础性研究,主要集中在刚度、阻尼、定位精度、动态性能以及结合部参数识别等方面;另一个是新型的导轨形式及控制的研究,例如静压导轨和磁浮导轨技术等。
1 机床导轨类型
导轨又称滑轨,其应用非常广泛,比如机床进给系统、电梯滑动导向系统、光刻机的快速步进精密定位机构、回转台等。本文仅以机床用导轨进行论述。
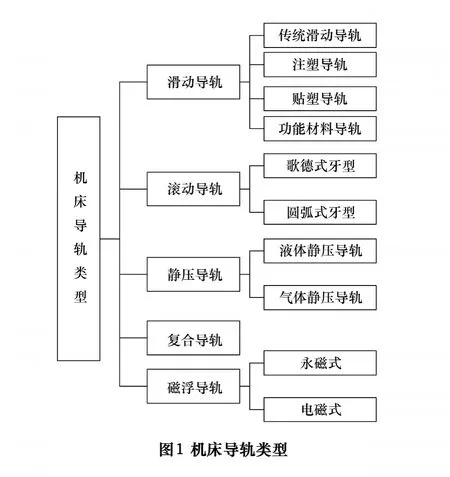
综合当前导轨相关技术的研究,将机床导轨类型进行分类,如图1所示。
2 滑动导轨
滑动导轨在各类机床产品上广为采用,在其他设备中也有广泛应用,比如电梯滑动导向系统。而针对滑动导轨性能的研究随着国家的重视和产业的需求也引起了专家学者的重视,涌现了大量的研究成果。
一般说来,滑动导轨最显著的特点是具有优良的刚性、吸振性(抑制刀具切削时产生的振动)和阻尼性(防止导轨系统启动或停止时的振荡),适宜切削负载大的机床采用。且结构简单、成本较低、经济实用。
2.1 常见滑动导轨形式
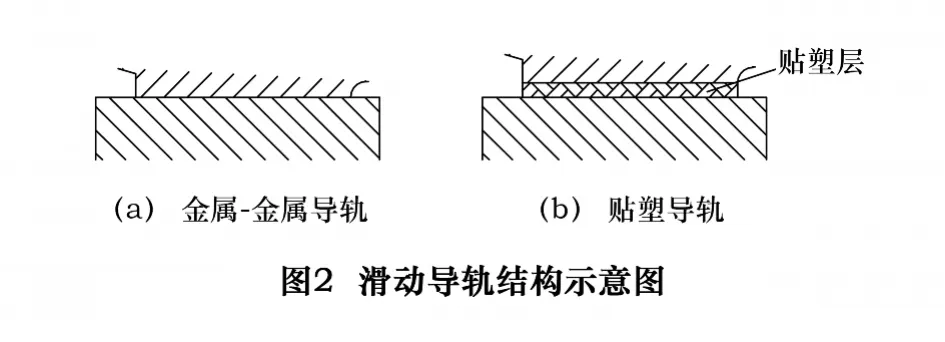
目前最常用的滑动导轨有两类,一类是金属对金属滑动导轨,通常采用铸铁件或钢件(镶钢导轨)制成,为了提高导轨的耐磨寿命和精度,又往往要进行表面淬硬处理和表面磨削处理。这种导轨在目前仍有大量的应用,例如一些大型回转台等。其结构示意图如图2a所示。另一类是金属对塑料滑动导轨,目前多采用在移动构件导轨面上粘贴非金属涂层(如聚四氟乙烯塑料软带),或采用注塑导轨面两种方式,其结构示意图如图2b所示。这种方式可以满足加工复杂形面的工件,提高工件加工的尺寸精度,同时又有效地减少导轨副的磨损,有利于机床长期地保持精度。贴塑导轨和注塑导轨的不同点在于前者的表面接触刚性不及后者好[1]。
进给导轨一般进给速度不高,金属对金属导轨则工作在混合摩擦区,非液体全接触,润滑条件差,如图3a中Ⅰ区所示;主运动导轨工作在临界速度以上,润滑充足,在导轨面间形成一定厚度的油膜,为液体接触,如图3a中Ⅱ区所示。为了形成动压润滑,常常在一个导轨面上开有楔形油槽。
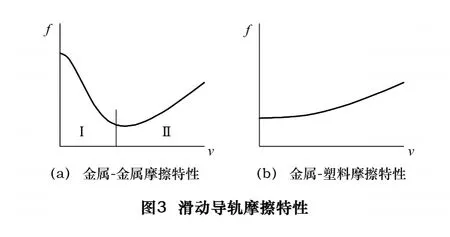
金属对塑料导轨具有良好的摩擦特性和耐磨性,其摩擦特性如图3b所示。由图中可以看出,金属对塑料导轨易形成动压油膜,无混合摩擦阶段,可保证较高的重复定位精度和满足微量进给时无爬行的要求。与滚动导轨相比,它还具有寿命长、结构简单、成本低、使用方便、吸振性好、刚性好等优点。因此贴塑或注塑导轨在现在的数控机床中应用广泛。与金属对金属滑动导轨相比,贴塑导轨有刚度小的劣势,在大型重载机床的应用中受到限制。
2.2 滑动导轨的研究现状
目前滑动导轨的研究集中在导轨结合面摩擦润滑和结合面动静态特性两大方面。20世纪中期到本世纪初,滑动导轨和其他驱动机构等机械部件的微动态特性,即摩擦学特性,由于其强非线性特性,已成为精密机械工程研究的首要问题。机床对机械部件的控制精度也提出了越来越高的要求。对机床滑动导轨更深一步的摩擦学研究,如何得到机构的特性,也就是说,如何建立滑动导轨结合部非线性特性模型,成为日益重要的问题。由于滑动导轨所具有的高刚度和高精度,这种导轨在精密机械中也有悠久的使用历史。但由于其严重的非线性摩擦特性,在超精密机械的设计中,滑动导轨使用较少,而广泛地采用气体/液体静压导轨。如果能用先进的控制方案来弥补滑动导轨非线性摩擦的缺点,它的优点一定会被人们重新认识。因此,滑动导轨的摩擦特性以及基于滑动导轨的非线性摩擦模型而产生的先进控制器成为相关领域学者的研究重点。
滑动导轨结合面动静态特性的研究也非常重要。目前各种结合面静态特性研究可以认为基本成熟;同滑动导轨结合面静态特性相比,结合面动态特性的研究要困难得多,因此其动态特性的研究则滞后很多。其原因有二,一是结合面本身并非是一个独立的动力学单元,它只能存在于机械结构系统中;二是结合面本身的阻尼与它所处的结构系统中的其他结构阻尼往往处于同一个数量级。正是由于此,给结合面动态特性实验研究的测试设备和测试技术提出了更高的要求。因此,尽管结合面动态基础特性研究这方面的研究论文也很多,但真正给出结合面动态基础特性参数数据的却很少。黄玉美等[2-6]对结合面动态基础特性参数的理论及其获取方法的研究进行了具有一定特色的、较为深入的研究,提出了用于获取具有通用性的结合面动态基础特性参数的实验装置的设计原则和结合面动态基础特性参数的影响因素的处理方法,对结合面的阻尼机理进行了进一步的深入研究,提出了固定结合面迟滞变形阻尼机理的本质是结合面间的微观(局部)滑移阻尼耗能以及以微观(局部)滑移阻尼耗能为主、微观局部撞击阻尼耗能为辅的固定结合面阻尼耗能机理。
伍良生等[7-10]提出了一种识别模型结合面特性参数的方法,该方法基于分时快速稳态正弦扫频激振的机床模态参数试验技术,由低频到高频逐级单一扫频激振,实现全周期采样,获取高精度的频响函数、各阶固有频率、振型、阻尼比等信息;同时建立了一种基于单位面积参数的结合面动力学模型,该模型采用一组在结合面上分布的弹簧与阻尼器来代替结合面的刚度与阻尼,识别的结合面特征参数更精确、通用性更强。并且在研究中发现,在结合面间加润滑油脂类介质可很好地改善结合面的接触状态,提高结合面的静态性能。这种方法引起了相关领域学者的注意,并据此提出了在结合面的微小接触间隙中填充低刚度中间介质的思路,该方法依靠中间介质在结合面间传递载荷。通过中间弹性层的塑性变形,在不提高结合面表面加工精度的条件下,实现更大的真实接触面积,从而在尽可能不影响结合面刚度的前提下,提高结合面的阻尼系数[11]。
对滑动导轨结合面的研究还处于刚起步阶段,虽然结合面动态基础特性研究这方面的研究论文也很多,但真正给出结合面动态基础特性参数数据的却很少,有些结果或结论还存在着相互矛盾或不一致的情况,所以有待做进一步的实验研究。国家重大专项课题之一“机床结合面特性数据库及整机静、动态精度数字化设计系统”正是体现了对这一问题的重视,以期通过机床结合面特性数据库的建立,对高精度数控机床的设计提供有价值的参考。
3 滚动导轨
滚动导轨出现的历史也较长,但大量采用是近20年来的事,它是随着数控机床高速化趋势的出现而被应用得越来越广泛。与滑动导轨不同的是,由于滚动导轨采用了钢球或滚柱做为滚动体,其与导轨的接触特点为点接触或线接触,具有较小的摩擦系数。又由于滚动导轨在组装过程中施加了一定的预加负荷,有较好的阻尼特性,但这种阻尼特性较之传统滑动导轨的阻尼特性有一定差距。滚动导轨与传统滑动导轨的较大的滑动接触面积比较,其优点是具有“最小的接触面积”,能极大地减小摩擦,从而使机床的响应更迅速,快移速度更高,对复杂曲面工件的高速加工更有利。但是这种“最小的接触面积”反而降低了导轨的刚性,因此滚动导轨在中轻载机床中应用广泛,而在重载机床的应用中面临着考验。
3.1 滚动导轨的类型
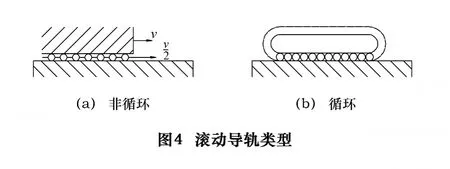
滚动导轨按照有无返回轨道分,可以分为循环式和非循环式滚动导轨。如图4所示,非循环式滚动导轨由于滚子无返回轨道,故导轨行程不宜太长,应用受到局限。而循环式滚动导轨行程可以任意长,应用广泛。
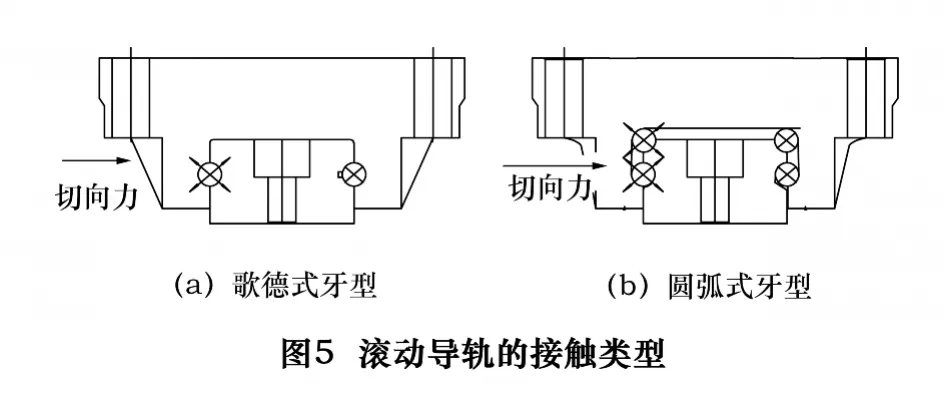
按照滚子在导轨和滑块之间的接触形式,滚动导轨可以分为歌德式牙型滚动导轨和圆弧式牙型滚动导轨。如图5所示,两种类型的滚动导轨相比,当承受切向力时,歌德式滚动导轨由于滚珠完全被约束住,故无侧向偏移,切向刚性比较稳定;而圆弧式滚动导轨在切向力的垂直方向没有完全约束,且接触形式为圆弧型,会产生一定的偏移,从而导致接触角发生改变而影响导轨的性能。而歌德式牙型其接触角能保持不变,刚性亦较稳定。
按照滚子的形状分,滚动导轨又可以分为滚珠型、滚柱型和滚针型等,在此不再赘述。
3.2 滚动导轨的发展现状
同滑动导轨一样,滚动导轨在机床上的应用依然取决于其动态特性,因此滚动结合面的动态特性研究也是该领域的一个研究重点,即如何提高其刚度和阻尼特性。因为滚动导轨的刚度大都由滚珠和轨道的接触刚度决定,其刚度与滚动轴承一样,可用赫兹接触理论来计算。因此提高滚动导轨的刚度方式为施加适当的预压。预压为一种消除背隙与减小滚珠与接触面弹性变形的方式。一般而言,有预压比无预压的刚性增加10倍以上,然而施加过大的预压,会导致摩擦力与发热量上升,增加滚珠磨损而使预压消失,对于定位精度与使用寿命有不良的影响。然而即使增加了预压的滚动导轨,其刚度和阻尼特性与滑动导轨相比仍有较大的差距,因此滚动导轨的应用局限于高速、轻载、定位精度高的机床以及机电一体化产品和工业机器人等方面。同时,滚动导轨结合面参数的识别也是研究重点,只有准确识别出滚动结合面的刚度、阻尼等参数,才能正确评估滚动导轨的动态性能,在导轨设计及使用中具有指导意义[12]。
随着滚动导轨开发研究的进展,滚动导轨正在向组合化、集成化、高速、低噪声、智能化方向发展。综合起来有以下几个发展方向:
(1)采用滚子保持形式的滚动导轨。为了保证滚动导轨中滚子平稳地运行,消除滚子间摩擦,滚动导轨间的滚子组将可以通过保持架形式看成一个无相对运动的整体,从而实现无噪声的稳定运行。
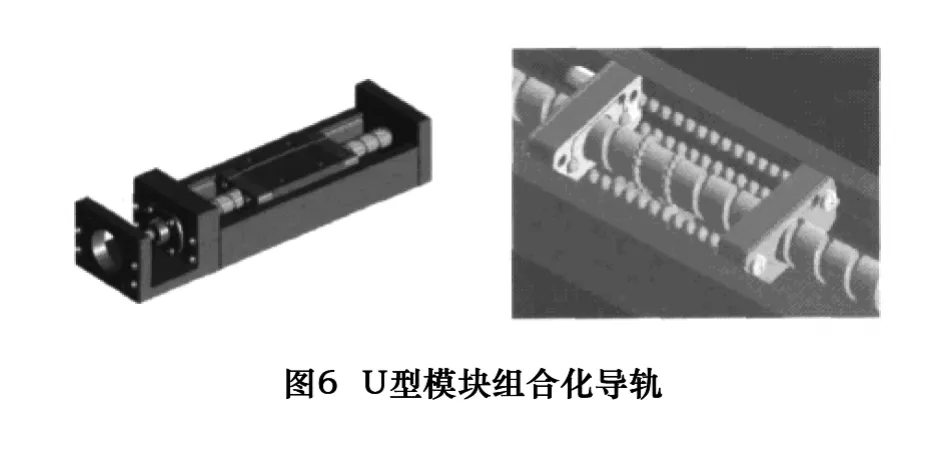
(2)与滑动导轨相结合,形成高刚度的复合导轨。例如台湾上银公司的U型模块组合化滚动导轨。不仅可以提供高刚性与高精度的特性,也可节省安装使用空间,如图6所示。
(3)新的驱动方式。随着“直接传动”概念的出现,即取消从电动机到工作部件之间的各种中间环节。并随着电动机及其驱动控制技术的发展,特别是直线电动机技术的日益成熟,直线电动机和直线滚动导轨相结合的一体化滑台系统将成为发展重点。SKF直线系统有限公司与Pratec直线电动机制造厂进行合作,于1996年已开始推广一体化的直线电动机滑台系统产品。
(4)智能型直线导轨。台湾上银公司的IG智能型直线导轨是运用复合化、轻量化与模块化的技术,并结合直线导引及位置回馈的设计功能所开发成的,为直线导轨与磁性编码器于一体的结构,可提供线性导引及位置回馈的功能。它不但将直线导轨及编码器整合化,节省了机构使用空间,而且还兼具直线导轨高刚性及磁性编码器高精度的优点。适用于定位精度要求高的场合。这也是轻型滚动导轨的一个发展方向[13-15]。
4 静压导轨
静压、动压导轨同静压、动压轴承工作原理相同。在两个相对运动的导轨面间形成静压或动压油膜,使运动件浮起。
4.1 动压导轨润滑简介
从宏观上来看,根据流体的Reynolds方程,两个导轨面能形成动压油膜的必要条件是:
(1)两摩擦滑动面间形成楔形间隙;
(2)两滑动表面之间有相互挤压运动;
(3)两滑动表面存在一定的相对速度。
然而普通导轨因为在进给时速度较低,一般都难以完全满足以上3个条件。故难以形成动压油膜。
从微观上看,由于两滑动表面粗糙度的存在,实际上存在着许多的微小的楔形间隙,由于这些间隙极小,其间易于充满润滑油,当导轨两表面相互滑动时,必然产生微观动压润滑现象,建立动压油膜,给表面以润滑。
动压润滑现象在普通导轨润滑中相当普遍,动压理论研究也相对成熟,在此不再详述。
4.2 静压导轨类型
静压导轨分为液体静压导轨和气体静压导轨两大类,其工作原理基本相同,限于篇幅,仅以液体静压导轨为例介绍。
静压导轨按结构形式可以分为开式静压导轨和闭式静压导轨。
开式静压导轨:压力油经节流器进入导轨的各个油腔,使运动部件浮起,导轨面被油膜隔开,油腔中的油不断地通过封油边而流回油箱。当动导轨受到外载荷作用向下产生一个位移时,导轨间隙变小,增加了回油阻力,使油腔中的油压升高,以平衡外载荷。
闭式静压导轨:在上、下导轨面上都开有油腔,可以承受双向外载荷,保证运动部件工作平稳。
按供油情况可分为恒流式静压导轨和恒压式静压导轨。
恒压式静压导轨是指节流器进口处的油压压强是一定的,这是目前应用较多的静压导轨。
恒流式静压导轨指流经油腔的润滑油流量是一个定值,这种静压导轨不用节流器,而是对每个油腔均有一个定量油泵供油。由于流量不变,当导轨间隙随外载荷的增大而变小时,则油压上升,载荷得到平衡。载荷的变化,只会引起很小的导轨间隙变化,因而油膜刚度较高。
4.3 静压导轨的研究现状及发展方向
我国的机床静压支承的现况与世界水平相比较(如从动静压轴承来看)应属先进水平,这可以从各国的动静压轴承发表的文章及应用情况中看出,如对于外节流的多油楔动静压类(HSDB-R)来说:无论从日本的丰田、琦玉大学的结构及美国专利,虽然有些类似于HSDB-R类中的有腔内回油等某些结构,但其发表的时间要比HSDB-R迟得多,结构布局上存在许多不足之处。在应用上我国也比国外多得多[16]。
简单来说,静压导轨的研究重点目前集中在导轨及油膜静态特性研究和动态特性研究两大方面。
目前国内外许多研究人员采用了有限元方法对油膜和导轨静态性能进行分析,并在求解油膜的承载能力和刚度的计算模型和方法上也做了许多工作,得出很好的效果[17-19]。孟心斋等人指出了液体静压支承传统的静态性能表达式存在的缺陷,提出了新的静态性能表达式。该表达式更加准确地体现了外载荷和支承间隙之间的非线性关系,真实地反映了支承的静态性能[20]。于晓东等人采用Fluent软件对油膜的压力状态、流动状态和温度场进行了三维综合数值模拟分析,揭示了恒流、恒转速情况下圆形腔和扇形腔的腔面积、腔深对摩擦副的力学性能、油膜的压力状态、流动状态和温度场的影响规律[21]。S Y Jeon和K H Kim对静压导轨油膜进行模拟,并进行静态分析,得到了液静压支承的结构变形和油膜性质变化[22]。
静压导轨的动态特性也是国内外分析的热点。而导轨的动态分析则主要包括了导轨结构的稳定性分析和模态分析。孙学赟和罗松保在采用理论方法分析对置油膜支承时采用了将油膜简化为弹簧与阻尼模型,建立动态微分方程,计算出在施加一定载荷(阶跃载荷,周期载荷)后的响应曲线判断导轨的稳定性[23]。陈学东等人对其研制的超精密工作台进行了深入的研究,在动态性能方面,采用了仿真与实验相结合的方法对工作台进行模态分析,得到了固有频率,并分析了影响超精密工作台定位的因素[24]。
Won-Jae Lee和Seok-ll Kim为更准确地掌握超精密机床的性质,对液体静压导轨和轴承进行了结合面刚度识别。该研究以有限元模型和通过测量机床结构位移得到的特性为依据,采用了建立优化模型,使有限元模型的特性与机床实验所得数据的相对误差值最小进行求解[25]。虽然识别出的模态参数与设计值差别较大,但是却提供了一种新的方法。
静压导轨的另一个重要研究方向是关于导轨结构对导轨特性的影响。主要研究导轨由于制造误差、受力变形等引起的定位误差,以提高其导向和支承精度。薛飞、赵万华等针对某种实际静压导轨设计方案,将导轨轮廓误差分解成具有不同波长的轮廓误差分量,应用油膜厚度均化分析方法,计算了不同轮廓误差分量对应的运动误差及静态均化系数。提出在设计时应优化油垫长度与运动直线度评定长度的比值,使静压导轨均化效应对于较宽波长范围的轮廓误差分量得以增强,从而减小运动误差与轮廓误差的比值,在提高导轨运动精度的同时降低其加工难度[26]。刘一磊、孙雅洲根据某种超精密机床的总体技术指标设计了闭式液体静压导轨,从滑块的偏移和幅板变形两个方面出发,分析了其对液体静压导轨静态性能的影响,并通过模态的仿真与实验分析,对液体静压导轨的动态特性进行研究[27]。
为了实现环保节能机床的设计,有学者进行了水液压支承技术的研究。这也是静压导轨发展的一个重要的值得关注的方向[28-29]。
5 磁浮导轨
5.1 磁浮导轨发展概述
磁浮导轨常见的一种实现形式是通过磁场力把进给平台浮起,使用直线电动机驱动平台运动。与传统的机床导轨相比,磁浮导轨具有无机械摩擦、无接触磨损和无需润滑的优点。由于相对运动表面间没有接触,因而彻底消除了爬行现象,没有因磨损和接触疲劳所产生的精度下降和寿命问题;而且省掉了静压导轨必需的庞大油路辅助设备,对环境不产生污染,并且其自身的加工精度要求比气体静压导轨低的多,降低了超洁净防尘条件;由于磁浮支承采用了主动控制,可提高机床的信息处理能力,如工况检测、预报和故障诊断。而且磁浮导轨有工作温度范围大、维护简单、寿命长等优点,因此磁悬浮支承技术得到了迅速的发展。
随着磁浮支承技术的发展,有望像磁悬浮列车那样把磁浮导轨应用到机床进给平台中去。然而,比磁悬浮列车中直线电动机驱动车身更难的是,磁浮导轨支承的机床进给平台除了要求高速驱动外,还要求高精度支承和定位,因此,目前国际上还没有采用磁浮导轨支承的机床驱动进给平台工业应用的报道。
我国磁浮支承技术已有了很大的发展,国防科技大学和西南交通大学研制了低速磁悬浮列车样车,清华大学、西安交通大学、上海大学和哈尔滨工业大学等研制了磁浮轴承支承的电主轴样机。但把直线电动机驱动的磁浮支承技术应用到机床导轨上,还有不少基础问题等待研究解决,其中磁浮导轨-直线电动机-机床进给平台系统的机电耦合动力学特性是最基础的问题之一,解决这个问题需要综合用到电磁学电子学、机械学、机床动力学、控制工程和计算机科学等知识,难度比较大,因此,目前世界上还没有采用磁浮导轨支承的机床成功应用实例的报道,它正处于实验室理论研究阶段。
5.2 磁浮导轨的研究现状
在磁悬浮导轨方面:早在1922年德国工程师赫尔曼·肯佩尔就提出了电磁悬浮原理,并于1934年申请了磁悬浮列车的专利。
国内对磁浮导轨技术进行了大量的研究,1996年,我国第一台4 t载人EMS(电磁型)型磁浮列车研制成功,这标志着我国掌握了磁浮列车的关键技术。
目前磁浮导轨技术的研究重点集中在以下几个方面:
(1)磁浮导轨本身的结构研究;
(2)磁浮导轨数学物理模型及控制方法研究;
(3)磁浮导轨动静态特性研究。
在磁浮导轨本身的结构研究方面,主要集中在磁材料特性的研究和磁导轨选材及稳定悬浮的研究方面,常见的有采用可控电磁铁磁浮结构和可控电磁铁与永磁体及高温超导材料相结合的磁浮结构[30]。
在磁浮导轨数学物理模型及控制方法研究方面,主要是通过建立磁浮导轨的数学模型,采用有限元方法求解磁浮导轨磁力分布,以及多磁体间和磁铁与驱动电动机间的磁场耦合问题。并针对这些问题提出有效的电磁铁控制方案及解耦办法[31-32]。
磁浮导轨的动静态特性是它的基础,尤其是刚度和阻尼的作用极为重要。磁浮导轨与传统导轨相比有自身独特的特性:可调的刚度、阻尼特性和可控的振动特性,通过调节控制参数可以改善导轨的刚度和阻尼,实现主动控制,从而改善导轨的动力学特性。陈亚英、朱煜分析了超精密工件台系统中电流变液ERF的机理和应用现状,提出“基于ERF半主动阻尼的直线电动机驱动-磁浮导轨”纳米级超精密工件台系统。介绍了国内外相关研究,分析了此工件台系统具有的特性及尚待解决的问题[33]。
采用磁悬浮支承技术的机床电主轴和工作平台可以满足超高速超精密的加工要求,它是未来加工机床发展的趋势。
6 结语
本文期望较为全面的论述机床导轨技术的发展现状及研究重点内容,由于涉及内容较多,论述存在不足之处。总体来说,机床导轨技术研究内容集中在以下几个方面:
(1)滑动导轨结合面动静态特性以及结合面参数识别的研究,其仍然适用于中低速、对刚度要求高的机床;
(2)直线滚动导轨的组合化、集成化、高速、低噪声、智能化研究;适用于高速轻载机床,其刚度阻尼等特性也是需要进一步的深入研究;
(3)液体静压导轨性能良好,但是其复杂的液压油系统以及液压油的使用是其劣势,不符合节能环保的理念,因此水压技术是其一个重要发展方向;
(4)磁浮导轨结合直线电动机驱动技术是机床导轨的最新发展方向。但是磁浮导轨-直线电动机-机床进给平台系统的机电耦合动力学特性问题需要综合用到电磁学电子学、机械学、机床动力学、控制工程和计算机科学等知识,难度比较大,目前正处于实验室理论研究阶段。
[1]李军.用传统的滑动导轨还是直线滚动导轨[J].制造技术与机床,2003(4):27-28.
[2]HUANG Yumei.An analytic method of joint conditioned damping parameters in dynamic design of mechanical system[C].Proc.3rd Inter.Conf.on High Tech.,Chiba,1992:511 -515.
[3]黄玉美,付卫平,董立新,等.结合面法向动态特性参数研究[J].机械工程学报,1993(3):74-78.
[4]黄玉美,付卫平,佟浚贤.获取结合面实用切向阻尼参数的方法[J].西安理工大学学报,1996(1):1 -5.
[5]FU W P,HUANG Y M,ZHANG X L.Experimental investigation of dynamic normal characteristics of machined joint surfaces[J].Transactions of ASME.Journal of Vibration and Acoustics,2000,122(4):393-398.
[6]杨家华,伍良生,管华.平面结合面参数识别的研究[J].北京工业大学学报,2000,26(3):20-23.
[7]王永宾.电主轴综合性能测试与评价系统的研究[D].北京:北京工业大学硕士论文,2009.
[8]伍良生,王永宾,周大帅.基于LabVIEW的电主轴径向回转误差测量技术[J].制造技术与机床,2009(9):13-17.
[9]伍良生,王永宾.分时快速稳态正弦扫频激振频响函数测量系统及方法[S].发明专利:200910084270.4.
[10]张威,伍良生,刘清龙.固定结合面的12弹簧-阻尼模型与结构动态特性分析[C].第十二届全国机械设计年会,2006:305-306.
[11]雷蕾.中间介质对结合部力学性质的影响研究[D].西安:西安理工大学硕士论文,2009.
[12]伍良生,张威,赵宏林,等.数控机床滚动导轨力学性质的实验研究[J].制造技术与机床,2006(7):26-28.
[13]天日和仁.滚珠丝杠和直线导轨的现状及技术动向[J].现代金属加工,2006(1):62 -64.
[14]屈岳陵.直线导轨的原理与发展[J].现代制造,2003(20):40-42.
[15]台湾上银科技公司.智能型直线导轨[J].现代制造,2004(10):56.
[16]丁振乾.我国机床液体静压技术的发展历史及现况[J].精密制造与自动化,2003(3):19-21.
[17]FAZIL Canbulut,CEM Sinanoglu,SAHIN Yildirim.Analysis of effects of sizes of orifice and pocket on the rigidity of hydroctatic bearing[J].KSME international journal(Korea),2004,18(3):432 -442.
[18]YU Xiaodong,ZHANG Yanqin,et al.Numerical simulation of gap flow of sector recess multi- pad hydrostatic thrust bearing[C].Proceedings of Asia Simulation conference 2008/7th Int.Conf.on Sys.Simulation and Scientific Computing,2008:675-679.
[19]CHEN M F,HUANG W L,CHEN Y P.Design of the aerostatic liner guideway with a passive disk-spring compensator for PCB drilling machine[J].Tribology International,2010(43):395 - 403.
[20]孟心斋,孟昭焱.恒流供油液静压支承静态性能新表达式与应用[J].洛阳工学院学报,2002,23(1):63-66.
[21]于晓东.重型静压推力轴承力学性能及油膜态数值模拟研究[D].哈尔滨:东北林业大学博士论文,2007.
[22]JEON S Y,KIM K H.A fluid film model for finite element analysis of structures with linear hydrostatic bearings[J].Mechanical Engineering Scince,2004(218):309 -316.
[23]孙学赟,罗松保.液体静压导轨的动态建模方法的研究[C].航天学会2005年学术交流论文集,2005:61-67.
[24]陈学东.超精密气浮定位工作台技术[M].武汉:华中科技大学出版社,2007.
[25]LEE Won-Jae,KIM Seok-ll.Joint stiffness identification of an ultra-precision machine for machining large-surface micro-features[J].International Journal of Precision Engineering and Manufacturing,2009,10(5):115 -121.
[26]薛飞,赵万华.静压导轨误差均化效应影响因素研究[J].西安交通大学学报,2010(11):33-36.
[27]刘一磊.超精密机床液体静压导轨静动态特性分析及模态参数识别[D].哈尔滨:哈尔滨工业大学硕士论文,2010.
[28]杨华勇,周华,路甬祥.水液压技术的研究现状与发展趋势[J].中国机械工程,2000,11(12):1430 -1433.
[29]YUI A,OKUYAMA S.Study on precision machine table equipped with constant- flow hydrostatic water bearings[C].12th International Symposium on Advances in Abrasive Technology,2009(76-78):664-669.
[30]田录林.永磁轴承和导轨磁力解析模型的研究[D].西安:西安理工大学博士论文,2008.
[31]李黎川,丁玉成,卢秉恒.超精密磁悬浮工作台及其解耦控制[J].机械工程学报,2004(9):84-88.
[32]许良琼,陆新江,李群明.模糊PID控制在电磁悬浮平台中的应用[J].中南大学学报:自然科学版,2005(8):631-636.
[33]陈亚英,朱煜.基于电流变效应的超精密工件台研究与展望[J].半导体技术,2005(3):11-17.
