基于三维地形可视化的GPS控制网布设
2012-09-22田文波余代俊林志鹏
田文波,余代俊,林志鹏
(成都理工大学地球科学学院,四川成都 610059)
1 引言
近年来GPS技术不断发展完善,已经大量应用于大地测量、工程测量以及变形监测等领域。GPS技术也因其全球性、全天候、精度高、测站间无须通视等特点渐渐取代传统控制测量方法,广泛应用于平面控制网的布设。在GPS控制测量中,首先要根据布网原则进行控制点选点。控制点的选取直接影响GPS控制网的网形及精度。
在进行选点之前,需要收集整个测区的相关资料,然后根据点位选择的要求进行野外踏勘选点。在对项目区域不熟悉的情况下进行选点有一定的盲目性,可以先建立整个地区的三维地面模型,在图像上直观的进行控制网布设,然后进行野外实地勘察,调整GPS点位和控制网网形,最后完成整个控制网的布设。
本文结合工程实例,主要论述利用遥感的三维地形可视化及漫游进行GPS控制点的选定及控制网的布设。
2 研究区概况、数据源
2.1 研究区概况
本次试验选择新疆某地区为研究区域,试验区域内包括河流、山地、冲积平原等复杂地貌。气候条件属于半干旱大陆性气候。
2.2 数据源
(1)Landset7 ETM+影像数据,Geotiff数据格式,获取时间为2010年,1~5以及第7波段空间分辨率30 m,第6波段和第8波段分别为60 m和15 m,采用多影像局部自适应回归分析模型进行条带修复。
(2)ASTER数字高程数据,IMG数据格式,空间分辨率30 m。
(3)1∶10000比例尺地质地形图。
(4)测区主要道路交通图以及普通地图等测区资料。
3 数据准备
3.1 遥感图像的几何校正
本次试验选取的图像获取时间为2010年9月,此时研究区正处在初秋季节,上空云量较少。进行控制网选点时只需观察所选控制点周围大体的地形情况,所以不太需要进行图像辐射校正。由于受遥感平台、地形起伏、地球表面曲率以及大气折射等因素的影响,遥感影像会发生扭曲、平移、缩放等变形,导致图像像元空间位置与实地位置信息不符,影响控制点选取的准确性,所以必须进行几何校正。本次试验使用Arc-GIS的Georeferncing工具条进行图像配准。通过对照已有的1∶10000比例尺地质地形图,在需要配准的影响上选取易识别的控制点,控制点点位要均匀分布,然后输入其实际坐标进行校正。
3.2 图像裁剪
本次项目区域面积为一矩形,南北长15 km,东西长10 km。需要将项目区域从整幅影像中裁剪出来,裁剪范围应略大于项目区域面积。ArcGIS的Arctoolbox中提供了多种数据提取方法,可以使用任意形状的区域进行裁剪,本次试验使用同一矩形区域分别对影像数据和高程数据进行裁剪。裁剪后的影像如图1所示。

图1 裁剪后影像
3.3 图像矢量化
将裁剪之后的遥感影像导入ERDAS IMAGINE二维窗口中。对照已有地图资料以及高分辨率谷歌地图对测区中的道路、河流以及村庄等进行矢量化,并保存线条样式等配置信息,颜色最好选用亮色调以便与周围地物区分。然后编辑村庄、道路、水系名称等,添加文字和数字信息到注记图层中。因为需要将DEM数据、遥感影像、矢量图形以及注记等多重数据进行集成,所以以上所有数据必须有相同的地理参考。要修改矢量文件以及注记文件的属性,确定其单位类型为map,单位是m。矢量化后的二维影像如图2所示。

图2 矢量化之后的影像
4 三维漫游及控制网布设
4.1 三维漫游
图像的三维漫游及可视化需要在ERDAS IMAGINE的Virtual GIS模块中进行。先建立或打开Virtual GIS工程文件,然后加载DEM数据、裁剪后的影像、矢量数据以及注记数据等。为了更好地查看区域内的三维地形变化,Virtual GIS模块提供了5种不同的航行模式。其中定位导航模式以及目标导航模式可以静态的查看图像内的任何区域。控制板导航模式提供飞行控制器,使观测者从不同的位置和角度俯瞰整个区域。地形导航模式则是沿着地表运行,通过改变观测方向以及行进方向了解周围三维地形。以上4种模式都支持漫游,最后一种选择导航模式用以矢量、注记以及栅格数据的空间查询,并不支持漫游。
Virtual GIS模块还提供三维环境飞行功能,飞行路线的选择有两种,一是在二维视窗中直接数字化,另外一种是直接添加三维坐标作为飞行路线,两种方式的飞行路线都可以保存。在对飞行高度以及飞行线路特性进行设置之后,就可以开始飞行操作,并且在飞行过程中进行三维飞行记录,将整个飞行过程保存为一段三维动画。
由于在进行GPS控制点野外选点时一般需要沿道路行车勘察,所以可以将道路作为三维飞行线路的一部分,并需要设置合适的飞行高度。三维漫游局部如图3所示.
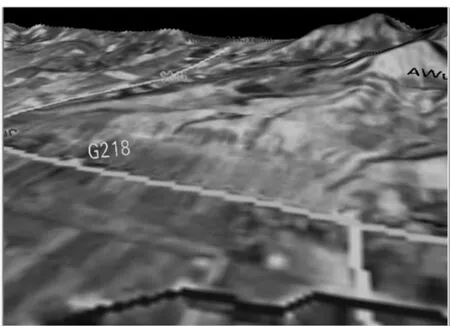
图3 三维漫游局部图
4.2 点位选定及控制网布设
经过以上几种导航模式三维漫游以及虚拟三维飞行之后,已经可以了解整个区域内的地形地貌以及道路交通等基本情况,根据项目设计要求,确定GPS点位的个数及大体区域。其中GPS选点要求如下:
(1)点位选择应符合技术设计要求,并有利于其他测量手段进行扩展和联测;
(2)点位的基础应坚实稳定,易于长期保存,并有利于安全作业;
(3)点位应便于安置接收设备和操作,视野应开阔,被测卫星的地平高度角应大于15°;
(4)点位应远离大功率无线电发射源(如电视台、微波站等),其距离不得小于200 m,并远离高压输电线,其距离不得小于50 m;
(5)附近不能有强烈干扰接收卫星信号的物体;
(6)交通应便于作业;
(7)应充分利用符合以上要求的旧有控制点及其标石和觇标。
本次项目要求整个控制网的平面精度达到国家E级GPS网的要求,高程控制通过GPS高程拟合达到五等水准高程测量精度。按技术要求以及GPS选点规范,在整个图像区域内选定6个GPS控制点大体位置。现场踏勘时根据实地情况对控制点位置进行微调,如存在图像分辨率限制无法在图像上显示的控制点周围干扰卫星信号的物体。
根据任务要求,在图像上设计一个图形结构及点位分布较好的网形,将控制点坐标导入南方CASS软件中,查看控制网的精度与可靠性,为野外选点提供方便,使选点工作更加条理,设计好的网形再通过实地踏勘确定其实际性及最终位置。最后确定GPS控制网如图4所示。
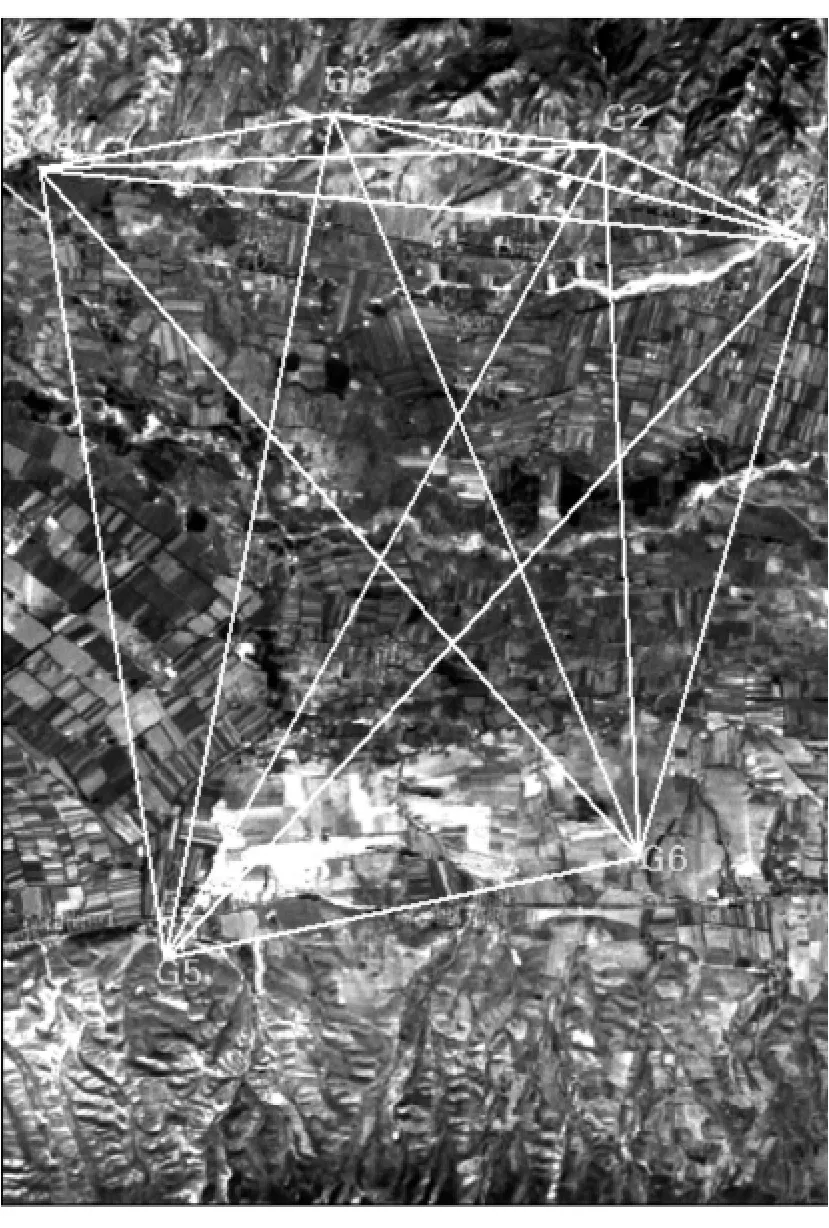
图4 遥感图像上GPS控制网
按照国家标准《全球定位系统(GPS)测量规范》(GB/T18314-2001)中GPS控制网测量精度的相关规定,对基线进行解算。基线解算过程中,每条基线满足:基线方差比Ratio≥3;基线固定误差≤10;RMS<0.02。
该项目解算所有基线均合格。其中,所有基线均优于1/7.9万,最佳为1/126万。
遵照规范相关精度规定,对基线的观测质量进行检验。该项目取 a≤10 mm,b≤20 ppm,D=4.21 km(平均基线边长),由基线标准差公式得出σ=84.79 mm。
本次观测的闭合环检验中同步环最大相对误差1.44 ppm,最小 0.88 ppm,误差限制为 15.00 ppm,符合同步环的闭合差指标;异步环最大相对误差2.95 ppm,最小 0.92 ppm,误差限制为 25.50 ppm,同样符合异步环的闭合差指标。
5 结论
数字三维地形可视化的应用很广泛,用以辅助GPS控制网布设只是一个方面。随着遥感图像以及高程数据的免费获取,可以更好地与GPS测量结合。在遥感影像上进行GPS控制网初步布设,可以大体计算基线长度是否满足精度要求等,同时可以有效提高野外踏勘选点的效率和精确度,可以满足低等级GPS控制网的布设。为了提高点位的准确性,应尽量选用分辨率高的遥感影像和高程数据,如Quick Bird或IKONOS影像等,并结合其他资料综合处理。在图像进行控制点选取只是起到辅助作用,点位的最终确定进行野外实地踏勘是必不可少的。
[1]贺英魁,罗强.GPS测量技术[M].重庆:重庆大学出版社,2010.
[2]彭芳媛,向常淦.基于ERDAS的三维地形可视化及漫游制作[J].测绘,2010,33(4):165~167.
[3]党安荣,王晓栋,陈晓峰等.ERDAS IMAGINE遥感图像处理方法[M].北京:清华大学出版社,2003.
[4]刘瑞敏,李华,王思锴等.基于Google Earth的地铁亦庄线 GPS控制网布设[J].测绘通报,2008,11:47~49.
[5]GB/T13814-2001.全球定位系统(GPS)测量规范[S].
[6]CJJ73-97.全球定位系统城市测量技术规范[S].
[7]徐杰,孟黎,唐诗华等.控制网选点系统的研究[J].测绘与空间地理信息,2008,31(1):158 ~161.
