基于压控电荷源和小波变换自适应算法的主-被动压电振动控制
2012-09-08马小陆裘进浩季宏丽李生权
马小陆,裘进浩,季宏丽,李生权
(1.南京航空航天大学 机械强度与振动国家重点实验室,南京 210016;2.安徽工业大学 电气信息学院,马鞍山 243002)
压电材料作为一种智能材料,以其良好的机电耦合特性,在智能结构中不仅同时具有传感和控制功能,还具有结构简单、质量轻、结构紧凑、可靠性高和频率响应好等特点,在现代振动控制中得到了广泛的应用。特别在航空航天、土木工程、汽车行业等对振动控制要求较高的场合与领域受到越来越多的关注[1-3]。目前在压电振动控制系统中,主要有被动、主动控制二大类。被动控制方法是利用压电材料的正压电效应,将结构振动的机械能转化为电能,再通过一个外接的电阻或电阻电感电路,将电能转化为电阻上消耗的热能,从而产生压电分流阻尼,起到抑制结构振动的目的。这种基于RL压电分流阻尼技术是由Forward在1979年最早提出,Hagood等[4-6]对其进行了里程碑式的定量分析,目前众多学者对此展开了研究。基于RL压电分流阻尼振动控制不需要复杂的电路,也不需要功率放大器,因此控制系统体积小、重量轻。但是这种方法存在的问题是系统鲁棒性差,阻尼效果会随着结构共振频率的变化而变差,而在工程实际中,结构共振频率不可避免受到外界因素的影响,且随被控模态数量的增加,被动控制电路复杂度增加,这就给RL压电分流阻尼振动控制系统的实际应用带来了很大的困难[7-8]。压电主动控制是以现代控制理论为主要工具,以压电材料作为受控结构的传感器和作动器,由压电传感器采集振动数据,通过计算机进行数据处理后输出控制信号,由压电驱动器对受控系统主动输入外部的控制能量,使受控振动响应与原振动响应相抵消,主动控制方法可以根据系统的需求采用不同的控制算法,当被控结构本身或运行环境发生改变时,可以在线调整控制参数,灵活性好,相对于被动控制而言,主动控制通常具有更高的性能,更好的减振效果。然而主动控制通常需要较高的输入功率,且存在潜在的不稳定性、鲁棒性差[9-10]。
基于上述原因,将主动控制和被动控制相结合无疑是一种好的方法。主-被动控制方法是将主动控制和被动控制有机地结合在一起。本文提出的基于压控电荷源和小波变换自适应算法的主-被动压电振动控制系统框图如图1所示,传感器将被控结构的振动信息反馈到小波变换域LMS控制器中,控制器发出主动控制信号驱动压控电荷源电路,对被控结构的振动进行被动控制。这种控制方法即具有被动控制稳定性好、功率需求低的优点,又具有主动控制高性能的特点。在以下各节中,给出了主-被动的控制原理,根据压电元件等效电路的特点,设计了压控电荷源的电路,基于dSPACE实时仿真系统,对四边固支的压电合金板结构进行了正弦信号激励下的单/多模态和白噪声信号激励下的振动控制实验研究,结果证明了提出的方法的可行性和优越性。

图1 主-被动压电振动控制系统框图Fig.1 The block diagram of active-passive piezoelectric vibration control system
1 主-被动控制原理
图1所示的主-被动压电振动控制系统的等效电路可用图2表示:

图2 主-被动压电振动控制系统等效电路Fig.2 The electrical equivalent of active-passive piezoelectric vibration control system
图2中,由运放的虚短可知:

压控电荷源的表达式为:

可见,此压控电荷源可看作一个可变负电容构造电路,其输入是可变电压Vc,输出则是随输入Vc而变的电荷Qc。因此,可假设图2所示的压控电荷源等效的可变负电容值为-Cr。
利用哈密顿原理(Hamilton’s Principle)可以推出图2所示系统的数学模型[11-12]如下:

其中:式(3)为被控结构的数学模型,M,C,K分别为结构的广义质量矩阵(被控结构和压电元件的质量之和)、广义阻尼矩阵及广义刚度矩阵(被控结构和压电元件的刚度之和),q为广义位移矩阵,Fm为结构所受的外部广义激励力;式(4)为压电分支电路的数学模型,Cr,Cp分别为等效可变负电容值和压电元件的等效电容值,Q为压电元件上的电荷;Kc为被控结构与分支电路之间的机电耦合矩阵。
对式(3)和式(4)两边进行拉氏变换,并令K1=1/Cp-1/Cr,得:

将上述定义代入式(5)得:


由式(7)可见,不同广义机电耦合系数ξ下,压电振动控制系统衰减性能不同。广义机电耦合系数ξ越大(即等效可变负电容值-Cr越接近压电片的固有电容Cp)时,压电振动控制系统的衰减性能越好。
可见,只要选择合适的压控电荷源的输入电压Vc,即可得到不同的等效可变负电容-Vr的值,则可以对被控对象的振动进行有效的抑制。
2 控制电压Vc的调节
为了更好地调节压控电荷源的控制电压,本文采用小波变换域LMS控制器。其原理图如图3所示。小波变换的方法是对自适应滤波器的输入信号进行正交变换将输入向量正交分解到多尺度空间,利用小波的时频局部特性可以减小输入向量自相关阵的相关性,大大增加了算法的收敛步长,从而提高LMS算法的收敛速度和稳态性能。
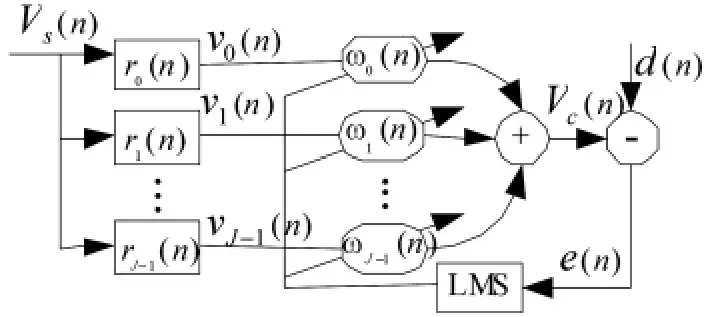
图3 小波变换域LMS算法设计的控制器示意图Fig.3 The controller schematic of the LMS algorithm in wavelet transform
图3中,Vs(n)为图1中的传感信号,Vc(n)为压控电荷源的控制电压信号,d(n)为参考信号,e(n)为偏差信号,rj(m){m=0,1,…,N -1}为小波滤波器,vj(n){n=0,1,…,N -1}为小波变换后的信号,WJ(n)=[w0(n),w1(n),…,wJ-1(n)]为自适应滤波器系数,其中:

式(8)为输入信号向量Vs(n)与滤波器rj(m){m=0,1,…,N -1}的离散卷积形式。
因此压控电荷源的控制电压为:

自适应滤波器权值更新公式为:

其中μ为收敛步长。
3 实验研究
3.1 控制系统和实验装置
为了验证所提出的主-被动控制方法的有效性,建立了图4所示的压电智能合金薄板结构实验装置图。
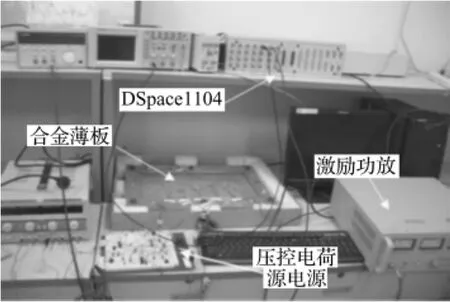
图4 实验装置图Fig.4 Physical photo of the experimental apparatus
合金板的外型尺寸及压电片的粘贴方案如图5所示,薄板和压电片的厚度均约为1mm。实验前利用MSC.Nastran结构分析软件对薄板进行模态分析,计算出薄板各阶固有频率大小及相应的应变最大位置,经模态分析知,压电片1贴于第一阶模态的应变最大位置;PZT5和PZT6分别粘贴在能同时感应到前三阶振动的位置上,在薄板的下表面与PZT5相对应的位置上,粘贴一块压电片PZT7,其目的也是为了使PZT7能同时感应前三阶振动。压电片尺寸为30×30×1(mm)。

图5 压电薄板外形及压电片粘贴方案Fig.5 The piezoelectric thin plate shape and PZT paste program
薄板的前三阶的共振频率分别为 73.66 Hz、114.10 Hz、240.5 Hz。对于多模态控制,其实验装置示意图如图6所示,激励信号选用频率与薄板前三阶共振频率相同的正弦信号的组合,信号经dSPACE1104的D/A输出至功放,功放输出信号连接PZT5激励四周固支薄板的振动。压电片7的传感信号经滤波后输入经dSPACE1104的 A/D输入至控制器,控制器输出经dSPACE的D/A端口连接至压控电荷源电路,电荷源的输出连接至压电片6,用于控制薄板的振动,压控电荷源电路中电容Cs为1微法,运算放大器选用LM356。
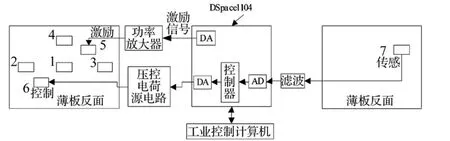
图6 实验装置示意图Fig.6 The schematic diagram of experimental apparatus
3.2 实验结果和分析
为验证所提出主-被动控制方法的有效性,被动控制的压控电荷源电路不变,进行了如下三种情况的实验验证,实验中,小波变换域LMS控制算法采用的db4小波,算法在Matlab中用S-Function C代码实现的,并且采用了MALLAT快速算法,提高了系统快速性,小波变换域LMS的收敛系数、滤波器波长和滤波器初始权值分别为0.01、32和0。
实验一:单模态振动控制实验
单模态实验时,激励信号选用频率与需要控制的模态共振频率相等的正弦信号,经dSPACE1104的D/A口输出至功放,功放输出信号连接PZT5激励四周固支薄板的振动,对于一阶模态控制,压电片7将传感信号经dSPACE1104的AD输入至小波变换域自适应控制算法的输入口,控制算法输出经dSPACE1104的DA输出至压控电荷放大器电路的输入端,压控电荷放大器电路的输出端连接至压电片1用于控制薄板的一阶振动,一阶模态控制实验如图7所示。

图7 一阶模态控制效果图Fig.7 The control effect diagram of first mode
实验中压电片6的信号被采集到dSPACE中用来观察控制前后的振动幅值,图7(a)横轴和纵轴分别表示时间和振动的幅值,图7(b)横轴和纵轴分别表示频率和振动的幅值。
从图7看出,利用压控电荷放大器和小波变换自适应算法的主-被动方法对四周固支的合金板进行单模态振动控制时,其一阶的振动幅值降低了7.36 dB。
实验二:多模态振动控制实验
激励信号选用频率与薄板前三阶共振频率相同的正弦信号的组合,连接图如图6所示,多模态的振动控制效果,如图8所示。

图8 多模态控制效果图Fig.8 The control effect diagram of multimode
从图8可以看出,运用此主-被动控制方法对系统多模态振动进行控制时,一阶模态的振动幅值降低了4.96 dB,二阶模态的振动幅值降低了10.71 dB,三阶模态的振动幅值降低了10.86 dB,实现了对系统的多模态振动的有效控制。
实验三:白噪声信号激励下的振动控制实验
在dSPACE仿真平台中,激励信号采用白噪声信号,PZT5作激励,压电片7作传感,压电片6作控制,其控制效果如图9所示。
从图9看出,此主-被动控制方法能够有效地抑制因白噪声信号引起的随机振动。
综合实验一、实验二和实验三可见,尽管激励信号变得越来越复杂,但基于压控电荷源和小波变换自适应算法的主-被动压电振动控制方法,在控制系统中被动控制电路不变和主动控制不需要功率放大器的条件下,都能够有效地抑制系统的振动。

图9 白噪声信号激励下控制前后响应的频谱图对比Fig.9 The comparison of control spectrum responses with and without control force under the white noise excitation
4 结论
压电被动振动方法中,分支电路元件参数对环境变化敏感,且随被控模态数量的增加,分支电路复杂度增加;压电主动振动方法需要较高的输入功率。针对这一问题,本文提出了一种基于压控电荷源和小波变换自适应算法的振动主-被动控制策略。根据压电片等效电路的特点,设计了压控电荷源电路,推导了主-被控制方法的控制理论;对于压控电荷源的控制电压调节,采用小波变换自适应算法,提高了系统的自适应能力。几种不同外界条件激励情况的主-被动振动控制实验说明,提出的方法能够有效的抑制压电合金板结构由于正弦激励引起的单模态和多模态引起的振动,且能有效抑制白噪声激励引起的随机振动。该控制方法具有如下特点:
(1)压控电荷源的控制电压采用小波变换自适应算法调节,系统的自适应和抗环境干扰能力强;
(2)相比主动控制方法,无需控制功放,系统轻便。
[1]Poulin K C,Vaicaitis R.Vibrations of stiffened composite panels with smart materials[J].Journal of Vibration and Acoustics-transactions of the ASME,2004,126(3):370-379.
[2]Balamurugan V,Narayanan S.Finite element modeling of stiffened piezolaminated plates and shells with piezoelectric layers for active vibration control[J].Smart Materials and Structures,2010,19:1 -21.
[3] Carra S,Amabili M,Ohayon R,et al.Active vibration control of a thin rectangular palat in air or in contact with water in presence of tonal primary disturbance[J].Aerospace Science And Technology,2008,12(1):54 -61.
[4] Lin Y J,Venna S V.A novel method for piezoelectric transducers placementfor passive vibration controlof geometrically non-linear structures[J].Sensor Review,2008,28(3):233-241.
[5]Porfiri M,dell'Isola F,Santini E.Modeling and design of passive electric networks interconnecting piezoelectric transducers for distributed vibration control[J].International Journal of Applied Electromagnetics and Mechanics,2005,21(2):69-87.
[6]Hagood N W,von Flotow A.Damping of structural vibrations with piezoelectric materials and passive electrical networks[J].Journal of Sound and Vibration,1991,146(2):243-268.
[7]Hollkamp J J.Multimodal passive vibration suppression with piezoelectric materials and resonant shunts[J].Journal of Intelligent Material Systmes and Structures,1994,5(1):49-57.
[8]Behrens S,Moheimani S O R,Fleming A J.Multiple mode current flowing passive piezoelectric shunt controller[J].Journal of Sound and Vibration,2003,266(5):929 -942.
[9] Xue X,Tang J.Vibration control of nonlinear rotating beam using piezoelectric actuator and sliding mode approach[J].Journal of Vibration and Control,2008,14(6):885 -908.
[10]Qiu J H,Masakazu H.Vibration control of a plate using a self-sensing piezoelectric actuator and an adaptive control approach[J].Journal of Intelligent Material Systems and Structures,2006,17(8-9):661-669.
[11]Morgan R A,Wang K W.An active-passive piezoelectric absorber forstructuralvibration controlunderharmonic excitationswith time-varying frequency,Part 1:algorithm development and analysis[J].Journal of Vibration and Acoustics,2002,124(1):77-89.
[12] Tsai M S,Wang K W.On the structural damping characteristics of active piezoelectric actuators with passive shunt[J].Journal of Sound and Vibration,1999,221(1):1 -22.
[13] Tang J,Wang K W.Active-passive hybrid piezoelectric networks for vibration control:comparisons and improvement[J].Smart Materials and Structures,2001,10(4):794-806.
