船载测控设备测角精度标定方法
2012-08-21王益忠叶玲玲
王益忠,叶玲玲
(中国卫星海上测控部,江苏 江阴 214431)
0 引言
测控设备测角精度标定技术一直是航天测量船重点研究方向之一。目前,航天测量船测控设备进行测角精度标定主要采用坞内标校、海上校飞、码头有塔标校、海上施放信标球验证等一系列程序来完成。纵观整个测控设备标校过程可以发现:海上测角精度标定是影响整个测控系统测量精度的关键环节。目前测量船主要采取海上施放信标球来进行测控设备的任务前角度标定,其过程一方面依赖于测控光学设备测量精度和海上气象条件限制,多次任务测试表明应用施放信标球标定光电偏差结果随机误差较大;另一方面该方法并不包含船姿船位测量误差引起的测控设备测角误差。因此,研究测控设备新的海上测角精度标定方法非常必要。
1 船载GPS探空标校系统
1.1 船载GPS探空系统
气象探测设备是测量船重要设备之一,其测量的高空气象数据是电磁波折射修正、电波传输时延修正以及低仰角大气折射修正的重要参数。目前,测量船装备使用了GPS高空探测系统[1]。该系统由气球携带的GPS数字探空仪和船载接收处理设备2部分组成,利用GPS卫星信号实时测定探空气球自由上升过程的飞行轨迹,由此计算出气球飞行过程的速度矢量,从而得到任意高度的风矢量。此外,在探空仪中配置了各类温、湿、压传感器,可以测出不同高度的温度、压力、相对湿度等气象参数。设备组成如图1所示[1]。
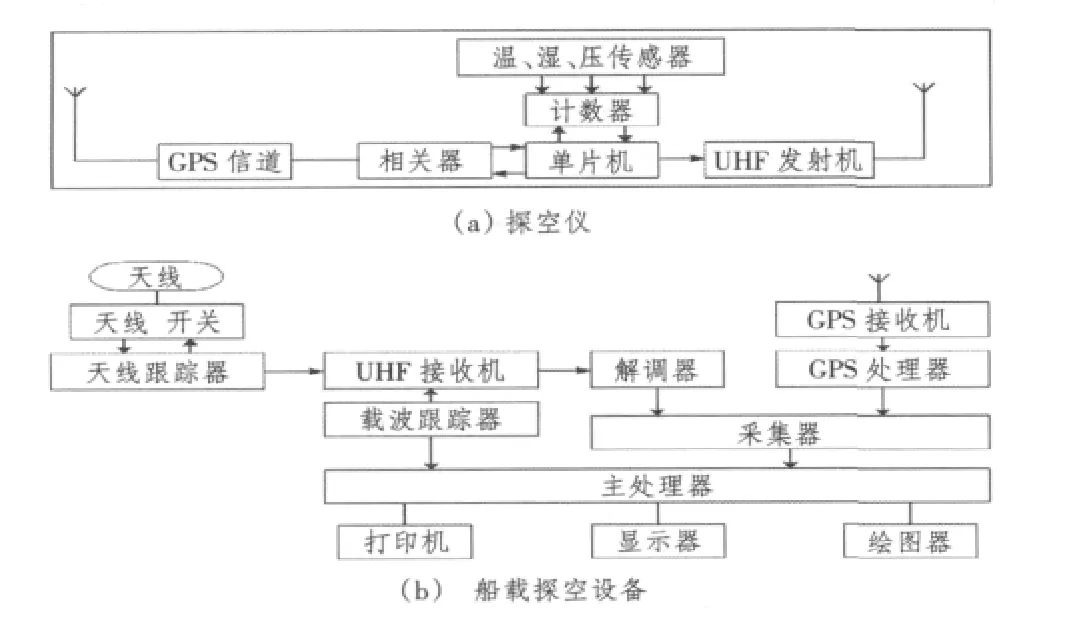
图1 GPS高空气象探测设备组成Fig.1 GPS sounding equipment composition
探空仪中的温、湿、压传感器测量得到的温度、压力、相对湿度等信息经处理成数字数据与气球携带的GPS接收机得到的数据一起经单片机合成编码后通过UHF发射机送回地面。船上GPS接收机接收GPS卫星的导航信息 (星历、历书等),该信息与UHF接收的数据一起送入主处理机进行气球位置及其飞行轨迹的解算,得到不同高度的温、湿、压和风速等数据。
1.2 船载GPS探空标校系统
1.2.1 标校原理
船载GPS探空标校系统采用“硬比较法”进行船载测控设备标校。所谓“硬比较法”就是选用精度高的测量设备作为标准设备,被鉴定设备与标准设备同时测量相同目标,然后按被鉴定设备的被鉴定元素比较二者的测量结果,通过统计方法计算被鉴定设备的系统误差和随机误差。船载测控设备GPS探空标校系统基本原理如下:
1)利用GPS高空探测设备跟踪探空气球获取气球的高精度定位,实时录取标校点 (气球)的经纬度、高程数据,形成标校点GPS高空位置数据文件A,记录格式为 (时间、经度、纬度、高度);
2)通过测量船船姿船位系统实时记录测控天线的大地坐标文件B,记录格式为 (时间、经度、纬度、高度);
3)船载测控设备跟踪信标球,实时录取测量数据文件C,记录格式为 (北京时间、距离、方位角、俯仰角);
针对数据文件A和B,通过坐标变换、静态解算、时空统一,求出测量船测控天线与标校点之间的相对空间数据文件D(北京时间、距离、方位角、俯仰角)。对文件C和文件D的距离、角度数据进行统计处理,即可获得船载测控系统误差。假设基于GPS定位数据文件A和B数据精确可靠,则该系统完全可以作为船载测控设备测角精度标定依据。
1.2.2 系统组成
船载GPS探空标校系统在保持原有各系统的基础上只需将船载测控设备信标球置于GPS探空仪气球上即可。船载GPS探空系统跟踪探空仪上的UHF天线,接收解算探空仪GPS位置数据;船载测控天线跟踪信标球,记录天线角度距离数据;船姿船位系统实时解算记录测控天线的大地坐标文件;船载GPS探空标校系统组成原理如图2所示。
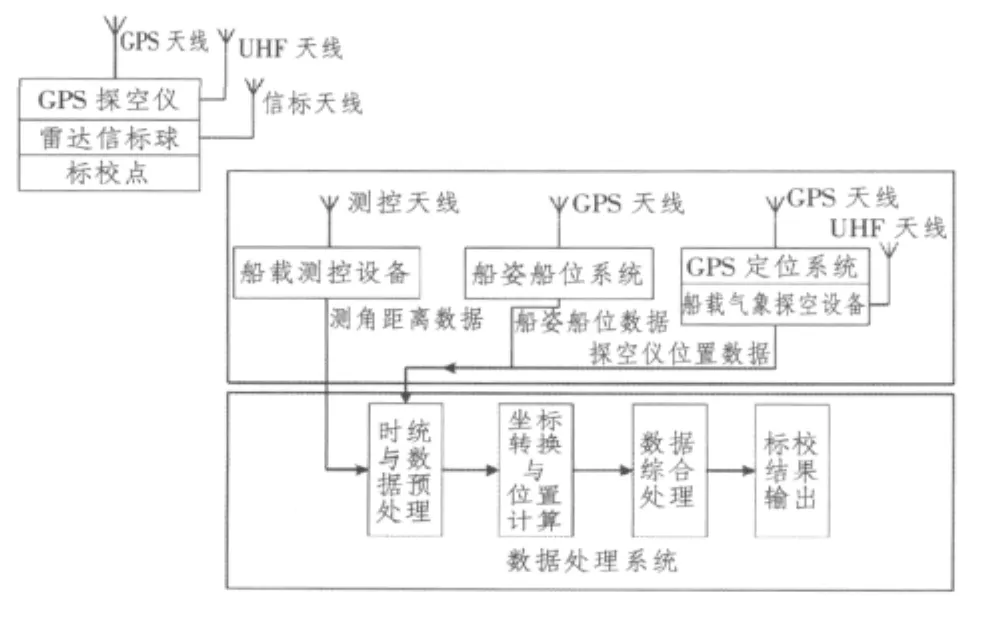
图2 船载GPS探空标校系统组成原理Fig.2 Shipboard GPS sounding calibration system composition principle
1.2.3 数据处理流程
船载GPS探空标校系统数据处理流程见图3。
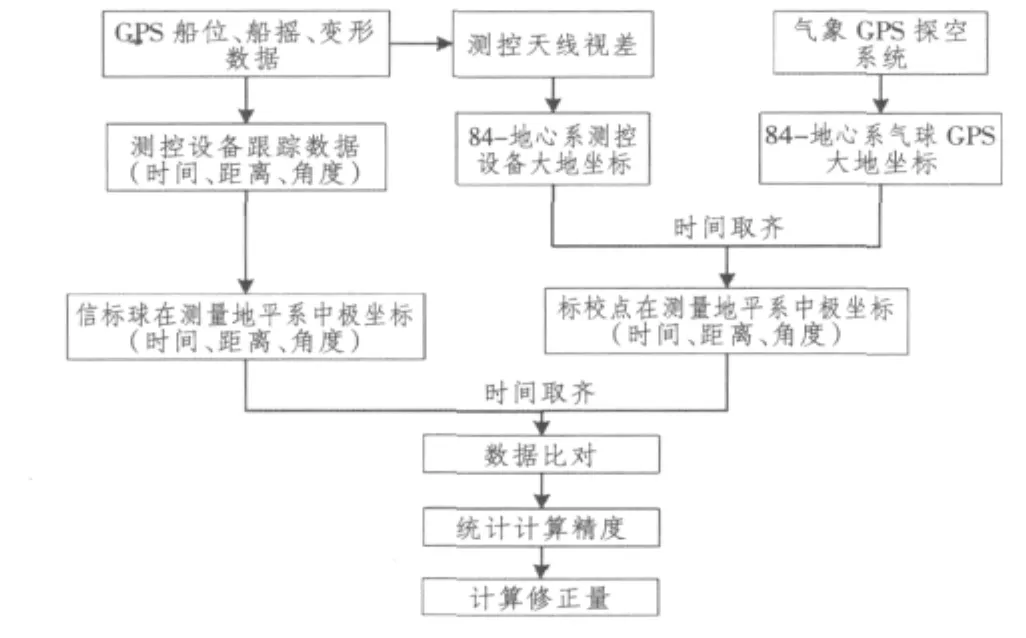
图3 船载GPS探空标校系统数据处理流程Fig.3 Shipboard GPS sounding calibration system data processing flow chart
2 数学模型及精度分析
2.1 船载测控设备与标校点的位置数据计算
2.1.1 大地坐标系转换到地心坐标系
船载测控设备和标校点测量[2]得到的大地坐标(λ,L,H)数据需换算成地心坐标系的直角坐标(Xe,Ye,Ze)进行。地心坐标系的原点在地心,Xe和Ye轴互相垂直并固定在赤道平面上,Ze轴与地球自转轴重合,由地心向外指向格林威治子午圈与赤道的交点,各坐标轴与地球固定连接。转换公式为
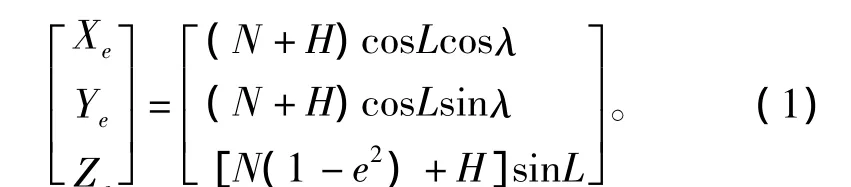
式中:H为高程数据;N=a/(1-e2sinL)1/2;a为地球的长半轴;e2为第一偏心率的平方;GPS系统采用WGS-84坐标系,其中:a=6378.137,e2=0.00669437999013。
2.1.2 地心坐标系转换到地平坐标系
地平坐标系的原点在测量设备三轴中心,X轴为正东方向,Y轴为正北方向,Z轴垂直于XOY平面。标校点在测量地平坐标系中的位置(X,Y,Z)为

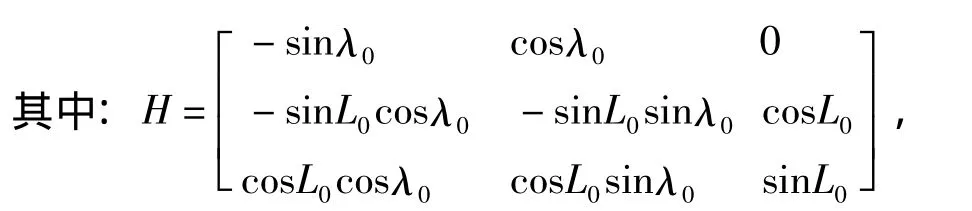
(λ0,L0)为测量设备三轴中心的大地经纬度。
2.1.3 测量地平系中标校点的极坐标计算
利用下列公式计算标校点位置在船载测控天线测量地平坐标系中的极坐标位置数据(D,A,E)。
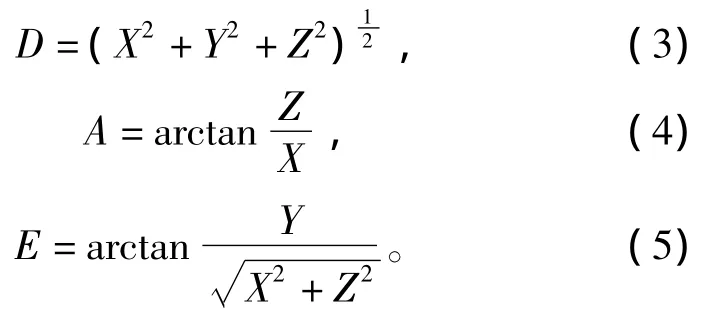
式中:D为距离;A为方位角;E为俯仰角。
2.2 标校数据统计处理
设{Dgi},{Agi},{Egi}分别为第 i(i=1,2,…,N)时刻利用GPS探空系统与船位系统测量数据计算得到的角度值和距离值;{Dri},{Ari},{Eri}分别为第i(i=1,2,…,N)时刻船载测控设备测量得到的角度值和距离值。对远距离测量数据可以根据需要进行分段计算,每段数据的样本数量N设为300~500,数据比较误差的数理统计方法如下:

2.3 精度分析
通过上述分析可以看出,影响该测角精度标定的主要因素如下:
1)测量船姿态误差带来的测量设备三轴中心换算误差;
2)GPS定位仪与信标球位置不一致误差;
3)GPS探空仪和船载卫导接收机定位误差。
上述3种误差中,测量船姿态测量设备使用了惯导系统,精度很高,因素1)影响很小,可以忽略;其次信标球和探空仪位置误差很小,因素2)也可以忽略。根据GPS探空系统的初步设计指标,GPS定位精度为水平误差小于3 m,垂直误差小于6 m。针对20 km高空目标,斜距达60~80 km,该角度误差为十几秒级,满足σ标准/σ被鉴>3~10,满足测量船测控设备海上标校要求。
3 结语
本文提出利用船载GPS探空仪搭建船载测控设备GPS探空标校系统,为船载测控设备海上测角精度标定提供了一种新方法。测量船海上测角精度标定技术一直是测量船关键技术之一,该系统的研究应用必将为测量船提高测控精度发挥巨大作用。随着我国二代导航系统建设加快,利用二代导航定位系统代替GPS定位系统将逐步成为可能,标校精度将会得到进一步提高;同时该技术在陆基测控系统同样适用,且借助GPS差分系统标校精度更高。
[1]江文达.航天测量船[M].北京:国防工业出版社,2002.298-300.
[2]钟德安.航天测量船测控通信设备标校与校飞技术[M].北京:国防工业出版社,2002.205 -208.
[3]刘高峰,刘建.基于GPS定位系统的舰船雷达标定系统研究[J].舰船科学技术,2006,28(6):100 -102.LIU Gao-feng,LIU Jian.Research on shipborne radar calibration system based on GPS positioning system[J].Ship Science and Technology,2006,28(6):100 -102.