全方位移动平台模糊滑模轨迹跟踪控制
2012-07-23王双双张豫南王和源李瀚飞
王双双,张豫南,王和源,田 鹏,李瀚飞
(1.装甲兵工程学院,北京100072;2.浙江信阳实业有限公司,浙江金华321025;3.66222部队,北京102202)
0引 言
全方位移动机构是机器人领域的研究方向之一[1]。相比于传统的轮式移动机构,全方位移动机构具有平面内完全的三个运动自由度,即沿X、Y方向的平动和绕Z轴的转动。可以实现平面上任意方向的平动或绕任意点进行任意半径的转向运动,具有非常灵活的机动性能,非常适用于狭窄空间和高精度轨迹跟踪的场合,在航空航天、军事安全[2]、仓储运输和社会服务等领域具有广泛的用途。
全方位移动技术在轮组结构、运动学、动力学、运动规划、运动控制等方面一直受到国内外众多学者的关注,并进行了相关内容的研究。文献[3]分析给出了一般结构形式的Mecanum四轮系统的运动学模型,优选出四轮全方位运动系统的最佳结构布局形式;文献[4]根据工作环境和任务要求的不同,研究了全方位移动机器人的自主、寻迹和遥控等3种控制方式;文献[5]利用模型参考模糊自适应控制方法构建了运动学位姿环控制器,结合动力学PID控制,形成全方位机器人的位姿闭环控制系统;文献[6]采用多传感器融合技术,组成智能式模糊逻辑逻辑控制系统,使全方位移动机器人具有自主导航和运动控制的功能;文献[7]通过外置CCD摄像头,对全方位机器人的位姿进行实时监测,实现了运动过程中位姿的校正控制;文献[8]使用采用模糊方位角估计器,对全方位机器人进行跟踪控制;文献[9]将摩擦影响和动力学考虑在内,描述了时间最优轨迹算法,实现了全方位足球机器人的路径生成和运动控制。
滑模变结构控制本质上是一类特殊的非线性控制方法,具有对系统的非线性、不确定因素和外界干扰的不变性,在工程实践中得到了广泛的应用。但滑模控制的缺点是控制律固有的抖振现象,会造成系统的不稳定[10]。
本文通过建立Mecanum轮型全方位移动平台的运动学和动力学模型,针对全方位轮的滑移和平台的重心偏移等非线性和不确定因素,利用多体动力学软件RecurDyn建立了平台的虚拟样机模型;设计了基于等效控制的滑模控制器,通过模糊切换增益,降低了输出抖振;采用虚拟样机模拟重心不断变化的情况,通过联合仿真实现了良好的轨迹跟踪效果,为实际全方位移动平台的运动控制研究提供了有效的方法。
1运动学建模
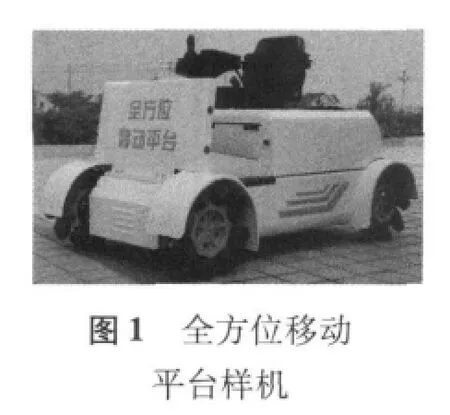
本文研究的Mecanum轮型全方位移动平台如图1所示,该平台采用四轮纵向对称式布局结构,斜向的两个轮子是相同的,而两侧的轮子是镜像对称的,辊子的偏置角为±45°。
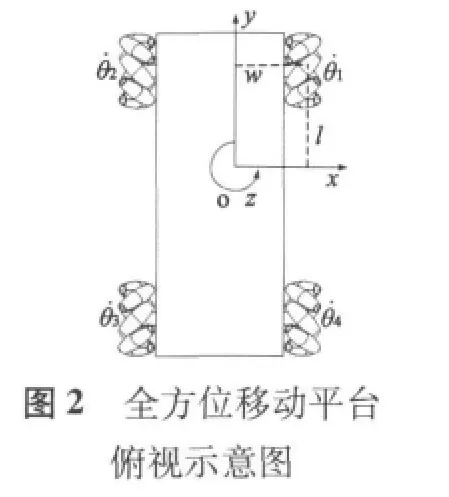
对全方位移动平台的定义如图2所示,为了便于建立运动学模型,设定假设条件如下:
(1)全方位移动平台在理想的平面上运动,车体、轮子和路面均为刚体。
(2)轮子与路面之间具有足够大的摩擦力,运动过程中不会发生轮子的打滑现象。
(3)平台的重心与平面几何中心重合。
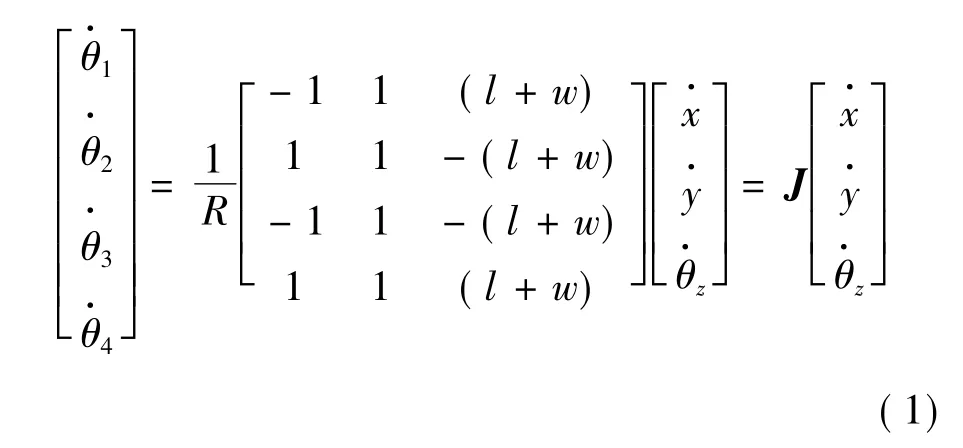
在此轮组布局结构下,通过对轮子的运动解析,得到平台的逆向运动学方程[3]:
2动力学建模
2.1拉格朗日动力学建模
对于系统的动力学建模,通常采用动力学基本理论,即牛顿-欧拉方程。这是一种力的动态平衡法,对于较为复杂的系统,此种方法十分复杂和麻烦。而拉格朗日力学不必求出内作用力,是一种功能平衡法,适用于复杂系统的动力学建模[11]。
拉格朗日方程可表示如下:

式中:qj为系统的广义坐标;L为拉格朗日函数,等于系统的动能减去势能;Φ为系统的耗散函数;Qj为系统的广义力。
由于在平面上运动,全方位移动平台的势能Ep=0,忽略辊子的自由旋转,因此其拉格朗日函数和耗散函数分别:
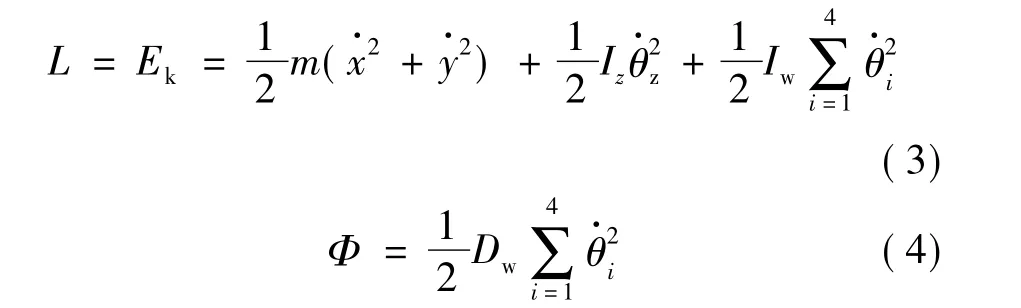
式中:m为平台的质量;Ek为平台的动能;Dw为轮子的黏性摩擦系数;Iz和Iw分别为平台和轮子的转动惯量。
对于全方位移动平台,定义广义力为轮子的驱动转矩Ti,广义坐标为轮子的角位移 θi,将式(1)、式(3)、式(4)代入式(2)中,得到拉格朗日动力学方程如下:
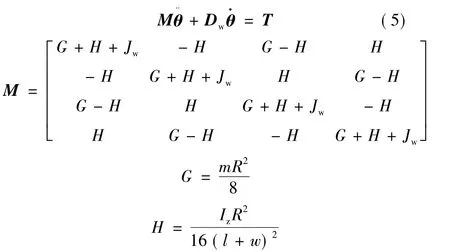
其 中: θ = [θ1θ2θ3θ4]T∈ R4,T =[T1T2T3T4]T∈R4,Dw=diag(Dw1,Dw2,Dw3,Dw4);为轮子的角加速度;M为运动惯量阵,其中的元素是由平台的参数决定的。
因此,全方位移动平台的动力学状态空间模型可表示为:

2.2虚拟样机动力学建模
对于实际的全方位移动平台及其工程应用(如全方位叉车和运载平台),在运动过程中会受到轮子的滑移和平台的重心偏移等非线性和不确定因素的影响,而式(6)作为动力学名义模型,不能完全包含上述影响因素。
本文建立了基于多体动力学软件RecurDyn的全方位移动平台虚拟样机模型。通过添加辊子与地面之间的面面接触以及辊子的旋转约束,模拟平台运动过程中轮子的滑移问题。设置平台上的负载物块缓慢运动,使得平台重心不断变化,进而模拟平台转动惯量不确定性和轮子负载扰动的情况,如图3所示。将虚拟样机模型和控制系统模型结合起来,进行联合仿真分析,可以为运动控制策略的研究提供更为有效的验证方法。

图3 全方位移动平台虚拟样机侧视图
3模糊滑模控制器
3.1 总体结构
本文将滑模控制与模糊控制结合起来,设计基于等效控制的模糊滑模控制器,总体结构如图4所示。由期望位姿和实际位姿得到位姿误差及其变化率,利用模糊规则对切换控制中的切换增益进行有效估计。在相点接近滑模面时,应减小切换增益,以减小相点穿越滑模面时的速度;在远离滑模面的地方,应该增大切换增益,以保证系统的快速性。通过模糊切换增益,减小滑模控制律的抖振,得到各个轮子的驱动转矩。在运动过程中抑制非线性因素、不确定量和外界干扰的影响,进而实现全方位移动平台精确的轨迹跟踪控制。
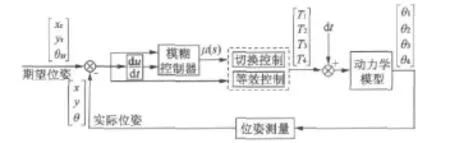
图4 模糊滑模轨迹跟踪控制总体结构
3.2滑模控制器设计
以全方位移动平台的位姿为广义坐标,由式(1)和式(6)得到动力学模型:

式中:X=[x y θz]为平台的位姿;为 X、Y 方向的线加速度和绕 Z轴的角加速度;dt=[dt1dt2dt3]T为轮子受到的外界干扰。
系统输入为平台的期望位姿 Xr=[xryrθzr],则位姿误差定义:
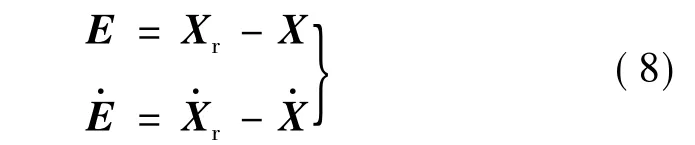
设计切换函数:

对于等效控制,不考虑平台的外界干扰,可以得到:

定义S=[S1S2S3]T,通过取=0,得到等效控制律:

式中:C=diag(c11c21c31)。

式中:切换增益 η =diag(η1η2η3),ηi≥(J+M-1dt)i。
结合式(11)和式(12),得到滑模控制律为:


因此系统是全局渐进稳定的。
3.3模糊控制器设计

其中,μ(s)=diag(μ1μ2μ3),当 μi=1 时,此时控制律为传统的等效滑模控制;当μi≠1时,通过μi的变化实现降低抖振的目的。
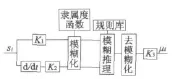
图5 模糊控制器结构图
本文的模糊控制器属于 Mamdani型二维模糊控制器,结构如图5所示,输入变量为和,输 出变 量 为μi,是切换控制增益 ηi的模糊系数值,K1、K2是输入变量的量化因子,K3是输出变量的比例因子[12]。
采用重心法将模糊输出清晰化,可以得到模糊控制查询表。轨迹跟踪控制时,根据si和的实际值,通过查询模糊控制表即可得到切换增益模糊系数值μi,实现对切换增益的模糊估计,进而可以降低滑模控制的输出抖振。
4仿真与分析
全方位移平台仿真模型的参数:平台质量m=1 703.5 kg,几何中心点转动惯量 Iz=692.1 kg·m2,单个轮子转动惯量 Iw=1.749 5 kg·m2,轮子半径 R=0.23 m,l=0.675 m,w=0.525 m。
采用PD控制和模糊滑模控制进行对比,其中,PD控制参数Kpi=500,Kdi=400;滑模控制参数Ci=[10 1]。
对全方位移动平台进行平动的圆轨迹跟踪仿真分析,圆轨迹公式:

式中:r为圆轨迹的半径;ωr为圆轨迹的角速度,设置 r=1,ωr=0.3。
4.1解析模型仿真结果及分析
采用全方位平台的状态空间模型作为被控对象,考虑系统干扰为高斯函数的形式,即:

取 Di=100,bi=0.5,ci=10,比较 PD 控制和模糊滑模控制的圆轨迹跟踪效果,部分仿真结果如图6~图9所示。
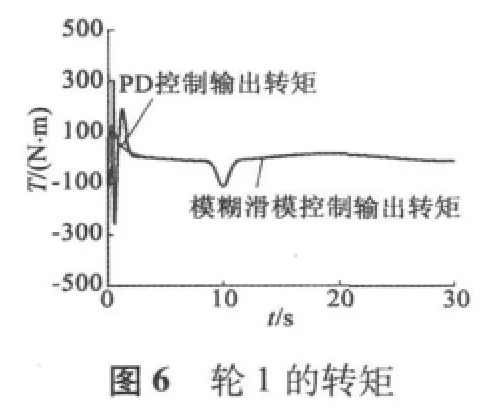
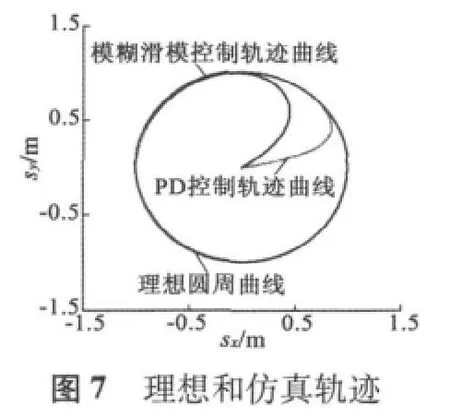
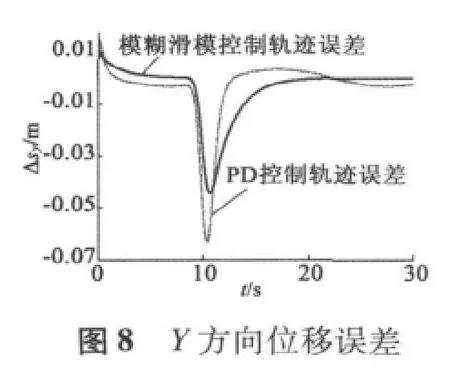
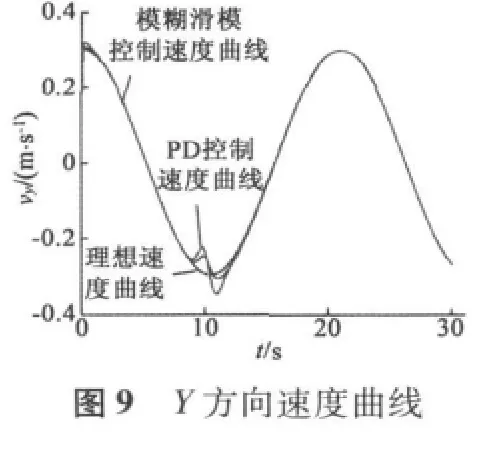
由仿真结果可以得到,采用模糊滑模控制可以基本消除控制量的抖振,在受到扰动时,模糊滑模控制的速度和位移误差均小于PD控制的误差,因此具有更高的轨迹跟踪精度。
4.2联合仿真结果及分析
采用全方位平台的虚拟样机模型,结合上述控制方法,建立Simulink/RecurDyn联合仿真模型。在虚拟样机模型中,设置负载物块以vL=0.125×sin(0.25t)的速度沿车体纵向中心线做缓慢往复运动,模拟平台重心不断变化的情况,验证控制方法的效果,结果如图10、图11所示。
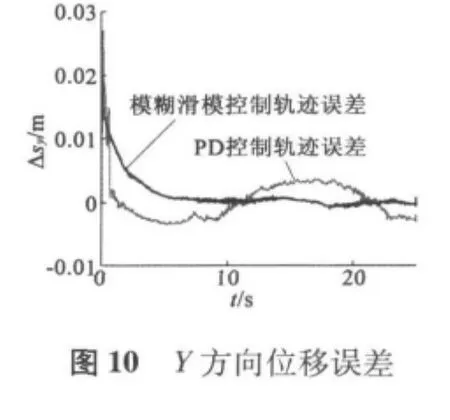
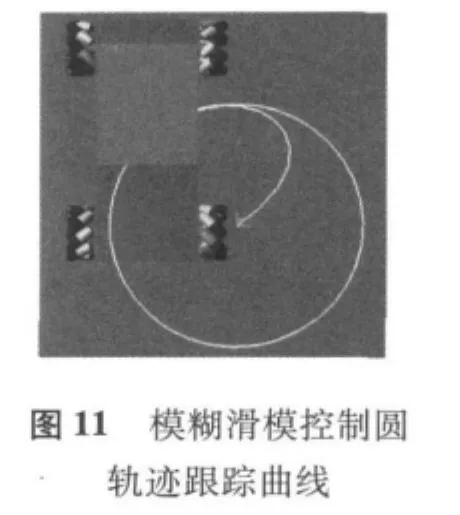
由联合仿真结果可知,采用模糊滑模控制的位移误差小于PD控制位移误差,且基本趋近于零。在运动过程中,消除了重心不断变化对姿态的影响,使平台始终保持原姿态,实现了平动的圆轨迹跟踪。
5结 语
本文以Mecanum轮型全方位移动平台为研究对象,建立了运动学和动力学模型;结合全方位轮的滑移和平台的重心偏移等非线性因素,采用多体动力学分析软件RecurDyn构建了虚拟样机模型;设计了基于等效控制的模糊滑模控制器,通过模糊估计切换增益,降低了输出抖振;分别使用解析模型和联合仿真模型对圆轨迹进行跟踪,通过与PD控制相比较,表明模糊滑模控制具有更好的轨迹跟踪效果。
[1] 赵冬斌,易建强.全方位移动机器人导论[M].北京:科学出版社,2010.
[2] McGowen H.Navy omni-directional vehicle(ODV)development:where the rubber meets the deck[J].Naval Engineers Journal,2000,112(4):217-228.
[3] 王一治,常德功.Mecanum四轮全方位系统的运动性能分析及结构形式优选[J].机械工程学报,2009,45(5):307-310.
[4] 贾茜,王兴松,周婧.基于多种控制方式的全方位移动机器人研制[J].电子机械工程,2010,26(4):61-64.
[5] 吴定会,黄旭东.全方位移动机器人速度的 MRFAC控制[C]//中国控制与决策学术年会议.2007:401-406.
[6] Kumile C M,Tlale N S.Intelligent distributed fuzzy logic control system(IDFLCS)of a mecanum wheeled autonomous guided vehicle[C]//IEEE International Conference of Mechatronics and Automation.2005,1:131-137.
[7] Viboonchaicheep P,Shimada A,Kosaka Y.Position rectification control for mecanum wheeled omni-directional vehicle[C]//The 29th Annual Conference of the IEEE on Industrial Electronics Society.2003:854-859.
[8] Kim Sangdae,Hyun Changho,Cho Youngwan,et al.Tracking control of 3-wheels omni-directional mobile robot using fuzzy azimuth estimator[C]//Proceedings of the 10th WSEAS International Conference on Robotics,Control And Manufacturing Technology.2010:47-51.
[9] Purwin O,D'Andrea R.Trajectory generation and control for four wheeled omnidirectional vehicles[J].Robotics and Autonomous Systems,2006,54:13-22.
[10] 刘金琨.滑模变结构控制MATLAB仿真[M].北京:清华大学出版社,2005:1-7.
[11] 蔡自兴.机器人学[M].北京:清华大学出版社,2000:89-90.
[12] 石新民,郝整清.模糊控制及其MATLAB仿真[M].北京:清华大学出版社&北京交通大学出版社,2008:93-102.