基于DSP+CPLD的四电动舵机伺服控制器设计
2012-07-23米月星
米月星 ,林 辉,李 志
(西北工业大学,陕西西安710129)
1四舵机伺服控制系统
舵机作为现代飞行器的伺服执行机构,对其质量、体积以及控制性能都提出了更高的要求[1-2]。舵机伺服系统分为四个独立的通道,分别完成对四个舵面的控制。每个通道由舵机本体和伺服控制器组成。四舵机伺服控制系统结构框图如图1所示。伺服控制器接收制导计算机的的位置信号给定,控制四台舵机按照给定的位置信号做相应的作动,控制各舵面的角度变化。
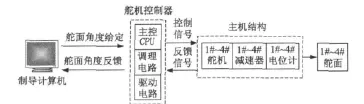
图1 四舵机伺服控制系统
2 12路霍尔信号的捕获
本系统中,霍尔信号同时送至DSP和CPLD。CPLD通过电机三相霍尔信号的逻辑运算产生PWM控制信号,DSP通过霍尔信号的捕获计算得知电机的转速作为速度环的回馈信号。电机的转速信号由霍尔信号回馈得知。单个DSP有6个CAP管脚,而四台电机共有12路霍尔信号需要捕获。单纯依靠DSP的CAP管脚无法实现对12路霍尔的捕获。这就需要CPLD将每三路霍尔信号异或,将异或信号送至DSP的CAP口。0~360°的电角度范围内,三相霍尔及其异或信号如图2所示。
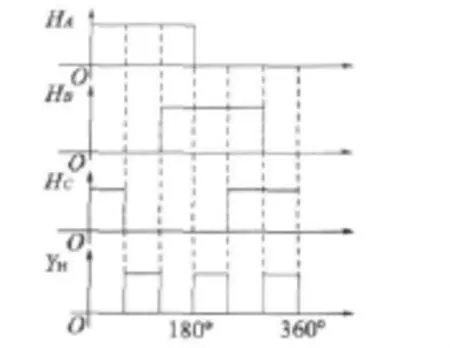
图2 三相霍尔及其异或信号
图 2 中,HA、HB、HC分别为一台电机的三相霍尔信号,YH为其异或信号。由图2看出,每相霍尔的上升或下降均能导致YH高低电平的变化。这样通过捕获YH信号的上升沿和下降沿,就能确定三相霍尔电平跳变的时刻。采用M法测速,在一定的时间T内,测取YH信号的脉冲个数M,从而得到电机的转速。这样,一台电机三相霍尔信号跳变的捕获可由一个CAP管脚完成,4个CAP管脚即可完成对12路霍尔信号跳变的捕获,并由此计算出四台电机的转速。
3 PWM信号的产生
单个DSP的EVA全比较单元PWM电路可以产生12路PWM,实现对两台电机的调速控制,无法满足四舵机伺服系统的控制要求。另一方面,DSP控制无刷直流电动机的起停和换相时,要进行大量的逻辑运算,就要占用大量的CPU资源,会大大影响CPU的工作效率[4]。无论是对四台舵机的控制要求,还是对系统的控制响应速度,都必须借助CPLD高速的逻辑运算能力。DSP完成AD采集、PID运算以及中断管理,CPLD完成多路PWM的产生以及实时保护的功能。系统选用EPM1270来完成多路PWM波的产生。DSP与CPLD的接口电路示意图如图3所示。
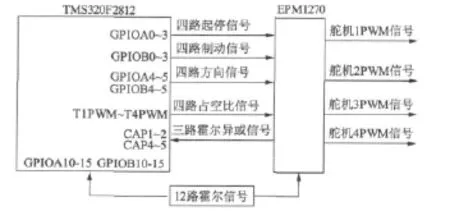
图3 DSP与CPLD的接口电路示意图
图3中,四台电机的起停、制动、方向信号由DSP的I/O口输出,占空比通过通用定时器的比较操作产生的T1PWM~T4PWM确定,CPLD将这几路信号与12路霍尔信号进行逻辑运算,输出四台舵机的PWM控制信号。
4软件设计
4.1 DSP 功能设计
DSP主要完成控制算法的计算和时间管理的功能,是系统的核心部分。系统采用位置环+速度环+电流环的死循环控制策略,死循环控制均采用PID算法。系统软件设计流程图如图4所示。
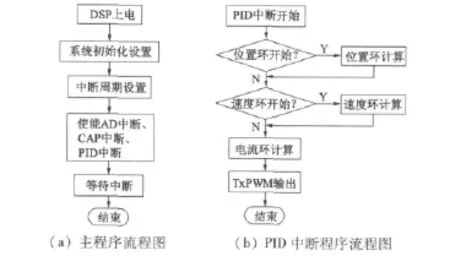
图4 系统软件设计流程图
图4(a)中,AD中断程序完成对电流传感器、电位计以及角度给定的采样;CAP中断程序完成对12路霍尔信号的捕获,并计算得出电机转速;PID中断完成PID控制算法。图4(b)中,将电流环的计算结果赋值给TxCMPR,实时改变占空比的大小,并通过TxPWM管脚将占空比送至CPLD。
4.2 CPLD 程序设计
CPLD的功能是把DSP的控制使能信号与霍尔信号进行逻辑运算,输出PWM控制信号。当接收到硬件保护信号时,关闭PWM输出,实时保护系统的正常工作。
在Quartus II集成开发工具中建立仿真波形,可以验证系统的有效性。电机换相逻辑信号仿真波形如图5所示。
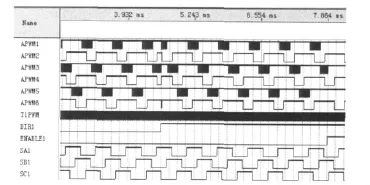
图5 电机换相逻辑信号仿真波形
图5中,APWM1~APWM6为舵机1的PWM控制信号,T1PWM、DIR1、ENABLE1分别为舵机1的占空比、方向和使能信号,SA1、SB1、SC1为舵机1的三相霍尔位置信号。程序上采用“上斩下不斩”的控制方法[5],即上桥臂输出的是斩波信号,下桥臂输出的是高低电平。当ENABLE1为低电平时,CPLD由各路信号进行逻辑运算,正常输出控制信号,当ENABLE1为高电平时,舵机1不使能,CPLD关闭PWM控制信号输出。
5实验结果
位置控制信号由导航计算机给定,位置信号由电位计回馈得知,速度信号由霍尔信号计算得出,母线电流由电流传感器ACS712回馈。电机在30%的占空比下运行时,DSP的CAP管脚捕获波形如图6所示。
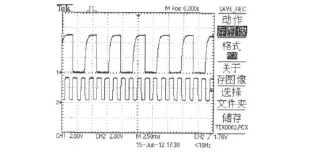
图6 CAP管脚的捕获波形
图6中,上图是A相霍尔信号,下图是三相霍尔的异或信号。可以看出,在0~360°的电角度范围内,异或信号有6个上升沿或下降沿,使得电机的每相霍尔信号的上升或下降均能被DSP捕获。
电机在30%的占空比下运行时,一个桥臂的PWM波形如图7所示。
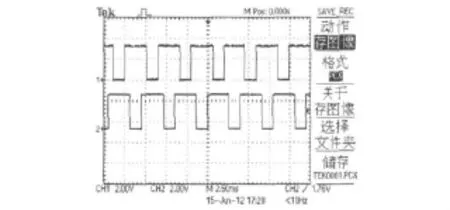
图7 30%占空比下,一个桥臂的PWM波形
图7中,PWM控制信号低电平有效,上桥臂为低电平时,下桥臂为高电平,关断对应的MOSFET开关管。
6结 语
本文设计了一种多舵机伺服控制器,基于单个DSP完成了四台舵机的伺服控制,系统充分利用了DSP强大的事件管理和浮点运算的能力以及CPLD高速的逻辑运算能力。实验结果验证了系统的正常工作。整个系统结构简单,集成度高,大大减小了系统控制器的体积,也大大提高了系统的可靠性。
[1] 周小庆.高速无人机电动舵机控制器的设计与实现[D].杭州:浙江大学,2010.
[2] 李世民,王新平.电动舵机控制系统设计[J].机械与电子,2011(11):60-63.
[3] Zhang Da,Li Hui.A stochastic-based FPGA controller for an induction motor drive with integrated neural network algorithms[J].IEEE Transactions on Industrial Electronics,2008,55(2):551-561.
[4] 米月星,林辉,高翌阳.天线双轴稳定平台伺服控制器的设计和实现[J].微特电机,2011,39(8):35-37.
[5] 刘冠志.基于DSP和CPLD的全电刹车驱动器设计[D].西安:西北工业大学,2010.
[6] 于凯平,郭宏,吴海洋.采用DSP和FPGA多电机速度伺服驱动控制平台[J].电机与控制学报,2011,15(9):39-43.