基于数据的PID设计方法比较
2012-07-06杨鑫
杨 鑫
(重庆理工大学化学化工学院,重庆 400054)
在过去的几十年里,基于模型的PID控制器设计研究发展迅速,提出了很多设计方法,例如连续循环法[1]、直接合成法[2]、内模控制法 (internal model control,IMC)[3-6]等[7-11]。其中 IMC-PID是应用最广泛的方法[11],通过调节PID设计算法中的λ参数,可得到很好的控制效果。但是此过程需要先得到过程模型,并需要通过模拟或是工厂实验来调节其参数,很费时间,工程代价也比较高。
为克服上述缺点,Campi等[12]提出了一种基于过程输入输出数据,不需要建立过程模型的PID控制器设计方法——虚拟参考反馈参数整定法(virtual reference feedback tuning,VRFT)。但是该方法的应用只限于离散时间系统[12-13]。为此Yang等[14-15]将VRFT方法发展到连续时间系统,提出了一种基于数据的PID控制器的设计方法。此方法不需要建立过程模型和进行反复实验来调节控制器参数,取得了很好的设计效果。Yang等[14-15]的研究表明,参考模型的选取对基于数据的PID控制器设计很重要。为研究不同参考模型对控制器设计效果的影响,本文采用2个参考模型对过程进行基于数据的PID控制器设计,并对计算结果进行分析比较。
1 基于数据的PID控制器设计
在基于数据的PID控制器设计中,需要用到一个参考模型,如图1所示。

图1 参考模型
参考模型T(s)表示一个反馈控制系统,其中包含了一个线性过程G(s)和PID控制器C(s),如图2所示。
控制器的设计目标是令图2中的反馈控制系统尽可能接近事先选定的图1中的参考模型T(s)。
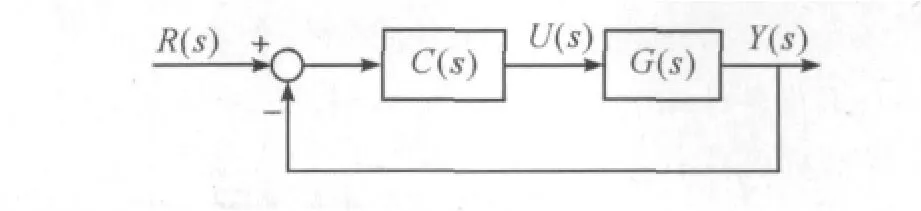
图2 反馈控制系统
过程G(s)未知,但是其过程输入输出数据U(s)和Y(s)可以通过开环实验得到。令s=jω,通过对过程输入输出数据进行离散傅里叶变换,得到在不同频率下的输入输出数据 U(jωi)和Y(jωi),其中是离散傅里叶变换计算需要的频率范围的上限。最后控制器的设计目标变为在频率范围 [ 0 ωmax]内的最小化问题,见方程(1)。推导过程详见文献[14-15]。

其中:Re(·)和Im(·)分别表示复数矩阵(或者向量)的实部和虚部;θ是参考模型T(s)的调节参数;Kc是比例增益;τI是积分时间;τD是微分时间。
对给定的θ,通过最小二乘法可得到方程(1)的解:

在给定的θ范围内,通过寻找最小的 J(θ),也就是J(θ*),其相应的解W*(θ*)可用来计算PID控制器参数。
2 参考模型T(s)及ωmax
本文选取了2个参考模型,第1个模型是基于环路传递方程L(s)的参考模型[9],另一个模型是二阶加纯滞后模型(SOPDT)[8]。
因为ωmax跟控制器设计紧密相关,可将ωmax设定为反馈系统的带宽频率ωb。由于过程模型和控制器未知,因此计算ωb的唯一方法是通过参考模型[14-15],见式(8)。
2.1 参考模型1及ωmax

参数θ的范围包含过程的时间延迟范围,并与方程(1)的优化求解有关。将参考模型1代入式(8),对每个 θ,ωb可通过式(10)得到[14]。

2.2 参考模型2及ωmax
第2个参考模型是二阶加纯滞后模型:

在控制器设计中,参考模型[15]采用 τ =0.5θ,ξ=0.9或1.0。既然 τ 是 θ的函数,ξ是固定的,因此方程(1)也与参数θ相关,θ的范围同样包括过程的时间延迟范围。
将参考模型2代入式(8),对每个 θ,得到

基于数据的PID控制器设计方法分为以下几步来执行:
步骤1 从开环实验中得到过程输入输出数据u(t)和y(t),并且给定θ的范围。
步骤2 求解方程(1)。对每个θ,根据参考模型可得到相应的ωb,令ωmax=ωb。
步骤3 用离散傅里叶变换得出过程输入输出数据的频率响应 U(ωi)和Y(ωi)。
步骤4 重复步骤2和3,直到在给定的θ范围内得到最小的J,其相应的最优结果W*可用来计算得到最佳的PID控制器参数。
3 算例

图3 输入输出数据(G1(s))
通过使用相同的输入输出数据和θ范围,分别用上述2个参考模型设计得到了PID控制器。图4比较了控制器的目标单位阶跃伺服响应。表1列出了控制器参数和其控制响应的绝对误差积分(IAE)。由此看出,采用基于L(s)的参考模型得到的控制器要比采用2阶加纯滞后模型T(s)得到的控制器产生的响应更快,但是过冲更大一点,振荡也稍多一点。从IAE结果比较看来,用这2个参考模型设计得到的控制器性能很相似。

表1 基于数据的PID控制器设计(G1(s))

图4 基于数据的PID控制器的目标单位阶跃伺服响应(G1(s))
除了第1个例子的G1(s),也对下面所列的其他10个过程进行比较研究。对每个过程,采用相同的输入输出数据和θ范围,用这2个参考模型分别设计了PID控制器。图5比较了控制器产生的目标单位阶跃伺服响应。通过比较可以看出,用基于L(s)参考模型设计的控制器要比第2个参考模型T(s)响应稍快,但是过冲稍微大一点。表2比较了控制器参数和其产生的控制响应的IAE数值。从IAE的比较来看,用这2个模型设计的PID控制器性能相当。


表2 基于数据的PID控制器设计(G2(s)-G11(s))

图5 基于数据的PID控制器的目标单位阶跃伺服响应(G2(s)-G11(s))
4 结束语
介绍了在连续时间系统下基于数据的PID控制器的设计方法,并研究比较了参考模型对该设计方法的影响效果。通过采用2种不同形式的参考模型来设计基于数据的PID控制器,结果表明,设计得到的控制器性能相当。也就是说,这2种参考模型都可以用来设计基于数据的PID控制器。该设计方法相对基于模型的IMC-PID控制器设计方法来说,不需要事先确定过程模型,也不需要迭代实验来找出最佳的控制器调节参数,从而节省了时间,降低了工程成本。
[1]Ziegler J G,Nichols N B.Optimum settings for automatic controllers[J].Transactions of ASME,1942,64:759-768.
[2]Chen D,Seborg D E.PI/PID controller design based on direct synthesis and disturbance rejection[J].Industiral and Engineering Chemistry Research,2002,41:4807-4822.
[3]Garcia C E,Morari M.Internal model control.1.a unifying review and some new results[J].Industrial and Engineering Chemistry Process Design and Development,1982,21:308-323.
[4]Chien I L,Fruehauf P S.Consider IMC tuning to improve controller performance[J].Chemical Engineering Progress,1990,56:33-41.
[5]Lee Y,Park S,Lee M,et al.PID controller tuning for desired closed-loop responses for SI/SO systems[J].AIChE Journal,1998,44:106-115.
[6]Skogestad S.Simple analytic rules for model reduction and PID controller tuning[J].Journal of Process Control,2003,13:291-309.
[7]Åström K J,Hägglund T.PID Controllers:Theory,Design and Tuning[M].North Carolina,USA:International Society for Measurement and Control,1995.
[8]Wang Q G,Hang C C,Bi Q.A frequency domain controller design method[J].Chemical Engineering Research and Design,1997,75:64-72.
[9]Huang H P,Jeng J C.Monitoring and assessment of control performance for single loop systems[J].Industiral and Engineering Chemistry Research,2002,41:1297-1309.
[10]O’Dwyer A.Handbook of PI and PID controller tuning rules[M].[S.l.]:Imperial College Press,2006.
[11]Li Y,Ang K H,Chong G C Y.Patents,software and hardware for PID control—An overview and analysis of the current art[J].IEEE Control Systems Magazine,2006,26:42-54.
[12]Campi M C,Lecchini A,Savaresi S M.Virtual feedback reference tuning(VRFT):a new direct approach to the design of feedback controllers[C]//Proceedings of 39rd IEEE Conference on Decision and Control.Sydney:IEEE,2000:623-629.
[13]Kansha Y,Hashimoto Y,Chiu M S.New results on VRFT design of PID controller[J].Chemical Engineering Research and Design,2008,86:925-931.
[14]Yang X,Xu B,Chiu M S.PID Controller Design Directly from Plant Data[J].Industrial engineering and cheimistry research,2011,50:1352-1359.
[15]Yang X,Xu B,Chiu M S.A Data-Based Approach to PID Controller Design[C]//the 5th International Symposium on Design,Operation and Control of Chemical Processes,PSE Asia .Singapore:[s.n.],2010.
[16]Skogestad S,Postlethwaite I.Multivariable Feedback Design:Analysis and Design[M].New York:Wiley,1996.
