利用线阵列相机测量轨道平顺度的研究
2012-06-20吴立群上海铁路局科研所
吴立群 上海铁路局科研所
我国高速铁路的建设始于1999年所兴建的秦沈客运专线。截至2010年12月底,中国国内运营时速200km以上的高速铁路里程已经达到8358km,其中包括既有线提速近3000km。
至2012年,中国将建成42条高速铁路客运专线,基本建成以"四纵四横"为骨架的全国快速客运网,总里程13 000 km;到2020年中国时速在200 km以上的高速铁路里程将会达到50 000 km。
1 高速铁路轨道必须具有高平顺度
适应列车高速度、高密度运行的线路,应具有高平顺性、高稳定性、高精度、少残变、少维修等特点。高速铁路行车的基础--轨道结构,其几何参数对高速行车的安全性起着至关重要的作用。
轮轨相互作用的理论研究指出,轨道不平顺所引起的轮轨动力响应及其行车安全性、平稳性和乘客舒适性的影响,均随行车速度的提高而显著增大。轨道不平顺是引起轮轨作用力增大的主要原因。焊缝不平顺,轨面剥离、擦伤、波形磨耗等原因,造成短波不平顺幅值虽然很小,但是,在高速行车条件下,就可引起很大的轮轨作用力和冲击振动。例如:一个0.2mm的迎轮台阶形微小焊缝不平顺,当车速高达300km/h时,所引起的高频振动作用力高达722kN,低频轮轨力可达321kN,使道砟破碎、道床路基产生不均匀沉陷,从而形成较大的中长波不平顺,并引起很大的噪声,严重情况时还可能引发钢轨、轮轨断裂,导致恶性脱轨事故。为了保证乘客阅读、餐饮、交谈不受干扰,法、日、德等国规定,局部不平顺引起的瞬时作用的垂直加速度半幅度不应大于0.12~0.15g,横向不大于 0.1~0.12g。
理论分析和实践都已证明,轨道不平顺直接影响高速行车的安全与平稳,另一方面由轨道不平顺引起的动荷载将进一步加速轨道的恶化和不平顺的发展,特别是长钢轨不平顺对高速行车时的旅客舒适度影响较大。因此,在实际运营过程中必须对轨道进行维护,使其在较长的时间内保持良好的平顺状态,以保障高速行车的安全与平稳。
2 现有轨道平顺度检测装置及本文测量装置原理
目前国内外检测轨道高低不平顺的方法主要有两种:弦测法和惯性法。
弦测法检测原理如图1所示,利用图1中A、C两轮与轨道接触点的连线ac弦作为测量的"基准线",将B轮与轨道接触点b偏离ac弦线的数值bl作为轨道不平顺的测量值。弦测值bl通过测量A、B、C三轮的轴箱相对于车体主梁的位移按下式求得:
弦测法存在的问题是,作为测量的"基准线"的ac弦是随轨道高低不平而起伏变化的,这就使得弦测法不能正确反映轨道的高低不平。所以应用弦测法,必须在系统中予以修正。

图1 弦测法检测原理
惯性基准法检测原理如图2所示,采用惯性元件陀螺仪建立基准线,本轮轴箱的上下运动H(即轨道的高低不平顺)等于质量快M的上下运动Z及质量快与轴箱间相对位移W之和,即:

质量块M对其惯性基准线的位移可用加速度传感器测出质量块M的加速度 经二次积分得到,质量块M与轴箱间的相对位移可用位移传感器测得。则式(2)可以表达为:

惯性法的主要缺点在于:测量系统庞大,测量机械结构复杂,设备的故障率高,安装和维修都不方便,测量成本高昂,此外由于测量是以车辆为载体,测量步长大,不容易得到钢轨的局部缺陷。

图2 惯性基准法
本文提出了新的一种检测原理,它即避免了弦测法"基准线"的不确定性,又避免了惯性法结构复杂的问题。检测原理如图3所示:
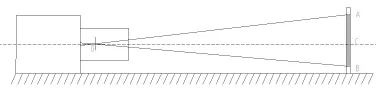
图3 检测原理图
图中左边是一台线阵列相机,线扫描方向自上而下,右边是一块面光源,AB区间为发光的范围,两台设备都放在钢轨上,当钢轨绝对平顺时,从相机可以读出发光区间AB所对应的像素区间,同时我们可以得出此位置处的像素当量。然而,当光源处的轨道呈凹或凸状时,AB区间呈下降或上升,相机像素区间也作相应的偏移,我们与理想像素区间比对出来的偏移量再乘上此处的像素当量,就可得出钢轨垂直方向不平顺的数值。
此外图中虚线OC是虚拟的水平线,也相当于弦测法中的"基准线",只是弦测法中这条线是不确定的,而这里,只要在相机视野范围里的任何一处,这条线都是唯一的,很好的解决了弦测法最大的不足。接着我们来确定这条虚拟水平线的像素点值。

图4 检测原理图
将相机和光源放在一理想水平钢轨上,由图可知 ΔOCB″∽ΔB′BB″,因 B 点及B″点像素点值已知,则可求出C点像素点值,即水平线确立。同理,同样利用三角形相似,可以得到任意处光源下边缘的像素点值,实际值与此值的偏差就可得出钢轨凹陷程度。
综上所述,当相机摆放位置确定时,我们可以得出钢轨任意离散点处轨道的凹凸相对于虚拟水平线的数值,即轨道的垂直方向平顺度。这种方法简单有效,设备使用寿命长。
3 关键程序代码
以下程序代码用C语言编写,得到光源放在不同位置处,轨道的不平顺程度。
//以下程序当光源放在最远处时 (以相机焦点为0点)且钢轨理想水平时使用

//以下为将设备放在被测钢轨任意位置处,假设放在X处

4 结束语
综上所述,我们可以得到0到10 m范围内任意位置轨道高差,然而一点一点测量比较耗费人力物力,因此可以考虑做一辆小车,将光源固定在小车上面,要求小车推动时运行平稳,这样我们可以将10 m范围连续的测量,之后通过描点画图的方法描述出这10 m范围内钢轨的真实曲线,便于分析轨道的长波。
另外,因为小车有一定的宽度,小于这宽度范围内的短波,会被此系统滤去,故在保证小车运行平稳的前提下,长度做的越小越好。
