荷兰海军APAR多功能雷达系统及其开发经验
2012-03-07谢红胜宿勇
谢红胜,宿勇
(1.中国舰船研究设计中心,湖北武汉430064;2.海军装备部,北京 100071)
0 引言
早在1991年11月,荷兰电信设备公司(Signaal)就和FEL-TNO公司的物理与电子实验室发起了“改进监视和跟踪的先进雷达技术(ARTIST)”项目的研究工作。目的是设计一种以“改进型海麻雀”导弹为基础的全综合防空战(AAW)系统,并且该系统能进行扩展以控制“标准”2导弹。由ARTIST项目发展而成的防空战系统最终将SMART-L和SMART-S雷达、STING相控阵火控雷达、红外传感器和防空导弹综合起来。1992年11月,德国和加拿大加入此项开发计划。1993年7月,荷兰、德国、加拿大三国共同签署了联合研制APAR舰载有源相控阵雷达的谅解备忘录(MOU),正式开启了APAR雷达的研制工作。
1995年12月29 日,荷兰电信设备公司与其海军签订了1.25亿美元关于APAR雷达工程开发模型(EMD)的合同。根据重新协商的APAR EMD的分工,荷兰出资0.456亿美元,德国0.419亿美元,加拿大0.375亿美元。该EMD合同分为2部分:第一部分为试验样机/技术示范品EMD-1(工程开发型1),用来确认计划中雷达的基本设计参数,主要是单阵列原型样机的研制;第二部分为一个技术试验台(EMD-2),由单个天线阵列构成,将其用作评估工具。EMD-2具有APAR雷达的全部性能,但其覆盖域、灵活性和ECCM功能受到一定限制。EMD -2是按照“三方护卫舰合作”防空战(TFC-AAW)计划单独生产APAR雷达,并参与TFC-AAW系统的陆基试验。第一部APAR雷达样机于1998年9月研制完成。同年底德国和荷兰海军都订购了该雷达。首批APAR雷达于2001年交付德国和荷兰海军。
APAR雷达设计用于保障海军区域防空任务,能同时完成对掠海飞行及高速俯冲小雷达反射截面积(RCS)反舰导弹威胁的探测、跟踪、火力控制、导弹引导等多种作战任务。
1 APAR雷达的威胁分析和功能概述
随着反舰导弹技术的不断发展和进步,现代舰载雷达必将面临掠海飞行及高速俯冲小雷达反射截面积(RCS)反舰导弹的威胁。上述2类导弹能以数个重力加速度机动,以极快的速度对己舰或防御平台发起攻击,对传统舰载雷达构成了巨大的挑战。其中,掠海飞行导弹威胁对于舰载雷达来说尤为危险。由于受水平和垂直视距的限制,加上舰载雷达在低空探测时通常会遭受多径效应和异常传播现象(如大气波导现象)影响,舰载雷达对这种导弹的探测能力会受到很大限制。即使对于地平线探测,舰载雷达的防御反应时间极为短暂,尤其当目标以超音速运动时。另外,传统舰载雷达通常需要1部火控雷达或光电传感器配合完成对舰载武器的火力控制以应敌。传统的机械旋转火控雷达或光电传感器必须以一定的时间顺序应对多个来袭目标,存在很大的时延。即使对于最先进的相控阵火控雷达来说,也要经历接收来自舰载雷达目标信息所消耗的时间。当敌方以足够多的导弹同时对己舰或防御平台发起饱和攻击时,这种探测、火控功能分离舰载雷达与敌导弹的交战能力将受到极大的限制。
要想从容应对上述威胁,舰载雷达必须要提高对低空目标、小RCS目标的探测能力,缩短从目标探测到与目标交战的反应时间,具有同时支持多批次舰对空交战的能力。APAR雷达能满足上述需求,可同时完成地平线搜索、导弹引导支援、(空中、水面、直升机)目标跟踪、水面火力支援、高距离分辨率目标成像、指令搜索、目标指示、有限体搜索等任务,并且每种任务均有相应的电子对抗措施以减少各种干扰的影响。APAR雷达作为舰上多传感器组件的一部分,与SMART-L远程监视三坐标雷达、舰载红外搜索与跟踪传感器等协同工作,进一步提高了战舰的综合防空探测能力。
2 APAR雷达的系统构成及主要性能参数
APAR雷达系统由4个固定的椭圆形天线阵列阵面组成,每个阵列包含3 200个X波段砷化镓单片微波集成电路(GaAs MMIC)收/发组件。这3 200个收/发组件又分为32个纵列。每个收/发组件都有自己的数据分配和功率变换单元,每秒能产生500个笔形波束。4阵面的APAR雷达对空探测距离达150 km,覆盖范围达360°×70°。在甲板下面,该雷达的组成部分还有1个数据处理和信号控制机柜以及1个与战舰综合指挥系统对接的接口装置。APAR雷达在大多数型号的护卫舰上都适于安装。
3 APAR雷达的技术特点
近年来不断增加的舰载雷达低空探测需求以及短系统反应时间和高发射功率要求,在很大程度上决定了APAR雷达的设计思想和技术特点。
3.1 灵活性和自适应能力
APAR雷达具有很强的灵活性,这使其能以尽可能快的速度探测到最具威胁的目标。与传统监视雷达和跟踪雷达不同,APAR雷达能同时实现二者的功能。传统监视雷达系统被设计为在尽可能大的距离、方位和高度范围内具备不依赖环境或未知目标特性的高鲁棒探测能力;跟踪雷达系统则设计为只在有限的距离、方位、高度和速度范围内具备对目标的精确探测能力。监视雷达与跟踪雷达在波束类型、扫描原理、信号波形、数据更新率等方面均有很多不同之处。APAR雷达之所以能同时完成技术要求截然不同的监视与跟踪任务,原因在于其具有较强的灵活性、自适应能力以及系统复杂性。下面举例说明APAR雷达的灵活性。
1)能自动调整跟踪目标所需的能量与时间消耗
APAR雷达对目标的探测跟踪过程均假定目标特性(如目标的RCS值)已知。RCS值可能随雷达视角、射频及电磁波传播环境改变而改变。图1为1架战斗机低空飞行接近雷达时的RCS测量值。图中曲线底部凹点是由多径波瓣引起的。APAR雷达在消除多径波瓣0点时,不只是通过自动功率调整手段,还通过在宽频范围内改变雷达载频来实现。
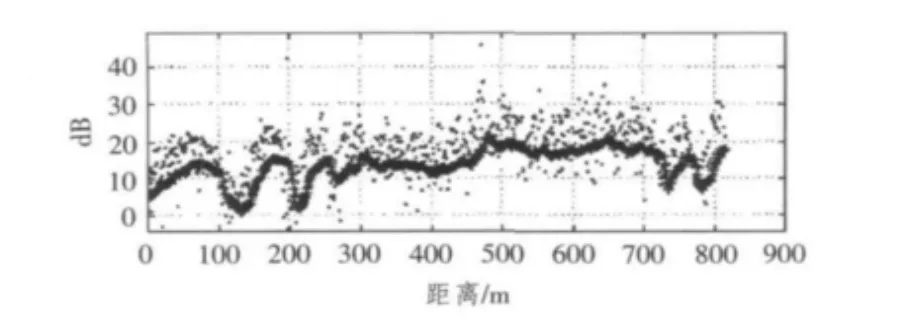
图1 1架战斗机以低仰角的飞行方向接近雷达时的RCS测量值Fig.1The RCS measured from a fighter aircraft,approaching the radar at low elevation
2)目标跟踪更新率参数能与目标参数自适应面对直线移动目标或非威胁目标,采用正常跟踪模式,而面对机动目标或交战目标,则采取较高的目标跟踪更新率。当目标进入雷达视野范围时,APAR雷达还可通过加宽波束来保持对目标的跟踪。此外,APAR雷达还采用与目标RCS值变化相适应的“自适应目标跟踪算法”。通过采用上述多种技术手段,APAR雷达能在各种作战条件下对机动目标进行跟踪。图2给出了某典型目标的RCS值随视角改变而变化的情况。
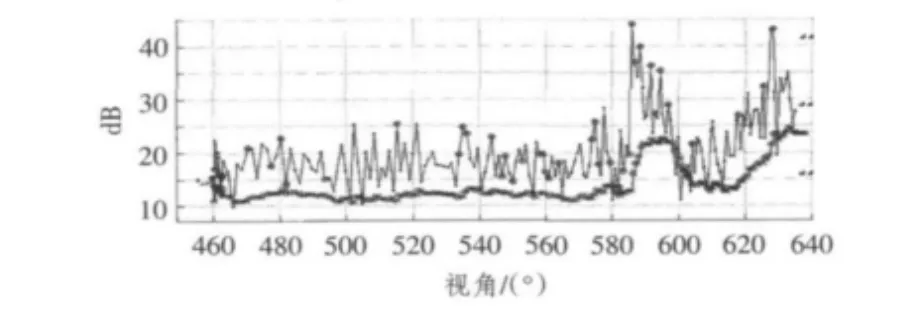
图2 目标RCS值随视角改变而变化的示例Fig.2Changes of the RCS due to variation of the aspect angle of the aircraft
3)能探测到在近程到中程距离范围之内突然出现的威胁目标
APAR雷达采用了特殊的波束和波形来探测所谓的“弹射目标”,如潜艇发射的导弹目标。雷达在探测到导弹目标之后,系统能立即计算目标跟踪轨迹,通过调整发射波形紧密监视目标,根据目标飞行轨迹反推发现导弹发射点。
3.2 抗干扰能力强
APAR雷达的4阵面有源相控阵天线采用X工作波段,使其具有了频率覆盖范围大、目标探测精度高等优点,能更好地抗多径效应、大气波导以及其他干扰。另外,APAR雷达的接收电路具有高增益、低噪声特性和大动态范围。因此,该雷达的灵敏度较高、产生的信号纯度高、抗杂波性能优良。在杂波环境下,该雷达还采用特殊波形来提高目标在杂波回波中的可见度。
尽管APAR雷达具备了上述基本技术特征,但掠海飞行导弹的小RCS值对雷达仍然提出了极为苛刻的要求。因此,抗杂波干扰对于APAR雷达来说仍是最具挑战性的。为此,APAR雷达进一步采用了一系列抗杂波/抗干扰技术:变化的信号波形、变化的波束形状、在处理电路中引入各种目标特征提取与分类技术等。
3.3 目标探测能力强
由于采用基于砷化镓单片微波集成电路的有源固态收/发组件,APAR雷达能产生满足各种作战任务所需的发射功率。APAR雷达的目标探测是基于多脉冲驻留时间实现的,每个脉冲驻留时间内的射频和脉冲重复频率均不相同。通过对单脉冲的雷达回波进行正确组合能有效补偿多径衰落,因此在驻留时间内的目标探测概率较大一些。
3.4 目标探测到交战的反应时间短
APAR雷达在使用搜索波束探测到目标之后马上用1束特定波束进一步确认探测,从而缩短系统的反应时间。在确认探测之后,系统立即启动火控跟踪。相控阵天线在雷达中的应用极大地缩短了传统搜索雷达在确认探测之前的旋转探测时间。
3.5 抗饱和攻击能力强
为了保障抗饱和攻击能力,APAR雷达的相控阵天线与新型的导弹引导方式相结合,在终端引导与交战阶段采用中段引导和间断连续波照射(ICWI)技术,能同时与多枚导弹交战。这种引导方式的引导信号脉冲特性与传统的连续引导不同,它使得APAR雷达可以通过时分的方式共享天线孔径,从而实现同时与多目标交战。
4 APAR雷达的开发方法和经验
4.1 开发经验
由于缺少有源相控阵雷达的相关开发经验,APAR雷达的开发必定会伴随大量的技术风险。因此,风险降低一直都是APAR雷达开发过程中遵循的一项基本原则,反应在APAR雷达项目开发过程的多个方面。
1)APAR雷达项目在启动之前已有一定的技术积累
APAR雷达项目的启动得益于之前的几项技术开发计划。该项目从20世纪70年代的机械旋转无源相控阵雷达系统开发计划(TOEKAN计划)中,获得了系统体系结构开发经验。80年代,泰利斯公司全身心地投入到北约防空战系统(NAAWS)的开发。通过该系统的开发,泰利斯公司完成了能满足北约未来防空任务需求的X波段有源相控阵雷达设计草图。受NAAWS计划的启发,荷兰海军授予了Signaal公司一份试验型有源相控阵雷达(EXPAR)主要建造单元的开发合同。通过该合同,雷达样机天线单元于1992年开发成功,同年APAR雷达计划的定义合同签订。在1995年开始的APAR雷达工程与制造开发(EMD)合同框架之下,APAR雷达系统的设计和鉴定最终得以完成。APAR雷达的这种渐进式的开发模式使得系统开发风险逐步降低。
2)APAR雷达工程与制造开发本身也是采用渐进式的开发模式
有一个例子最好地证明了这一点。一个主要的风险是建造高效费比的X波段有源收/发模块。收/发模块是雷达系统开发首要考虑的成本因素,其能否批量生产决定了系统可承受性。APAR雷达在收/发模块中大量应用了多步设计法,即分层多阶段的方式来设计和制造收/发模块,在每个阶段中逐步加入测试过的零部件。这种开发方法可以在保证收/发模块成品率的同时通过减少阶段数来降低系统的开发费用。APAR雷达应用软件的开发也采用类似的分阶段多版本方法,在每个阶段中逐步定义一些S/W版本,每一版本则增加一些新功能。这种系统功能增量式添加的方式对系统复杂性的控制非常重要。
3)对测试和评估环境进行最大程度的控制
由于APAR雷达具有多功能性和一定的自适应处理能力,进一步加大了对雷达测试的难度。任何一次系统故障都可能是多种原因引起的,因此,如果不能相应地对系统测试和评估环境作出改变和控制,分离并解决故障将变得十分困难。这种对测试环境的控制是通过大量使用具有实时仿真能力的自适应雷达环境模拟器(ARES)实现的。这种模拟器能产生各种特征的目标、噪声和干扰信号,注入APAR雷达各级系统中,如:紧跟在天线后的视频显示终端、射频终端甚至在紧凑天线测试场内APAR天线发射的EM平面波。使用模拟器定义场景并注入到APAR雷达系统中能对系统实时响应结果进行分析。这种对测试环境的完全控制降低了系统级测试的风险和费用。
APAR雷达的这种测试和评估环境的控制模式表明,系统开发中选择的风险管理方法很成功。此外,反复的系统评估同样十分重要,特别是对于系统级的集成,多功能雷达的系统复杂性往往会造成一些无法预测的挑战。APAR雷达花在系统级上的开发工作量超过了硬件设计和基础开发工作量,因此系统级集成技术对于APAR雷达来说风险也最大。
系统级集成包括将APAR雷达各部分的功能集成到一个能体现特定行为的自适应操作环中。这方面的发展从1999年以来就变得非常明显,当时工程开发模型(EDM)正安装在荷兰海军位于荷兰赫尔德海军基地的陆地试验场(LBTS)。LBTS紧邻海岸,能提供操作环境下的典型测试环境。2001年以来,APAR雷达先后安装在了德国F124和荷兰LCF舰上,为系统级的活动提供了更多可用的测试场所。
4.2 主要挑战
1)系统级评估的挑战
①恶劣环境下的自动分类算法。APAR雷达工作在包括海杂波、地杂波、飞鸟、雨以及各种目标的真实环境中,必须对接收到的大量回波信号进行分析和解释。其中,大量的工作都花在了能使雷达虚警率最小化的目标信号自动分类算法的设计和调整上,力求在不降低雷达灵敏性的情况下对所关心的目标进行可靠跟踪。
②时间预算管理。APAR雷达以时分方式共享天线孔径,能执行多种任务。为避免天线空闲,天线时间线(每个天线有1个)通常会被完全占用。为能找到满足更新率、降低时延要求的传输时间间隙,系统需要采用智能动态规划算法,在预算开支和驻留优先级间找到令人满意的平衡。这样的算法需要在各种条件下做出详细的评估之后才能获得可靠的性能。
③闭环目标跟踪时的在线波形计算。对于采用特定跟踪驻留时间的目标跟踪(与边跟踪边扫描不同,是APAR雷达的一项能力)来说,雷达波形是基于之前的在线测量和处理过的目标特征在线确定的。这样就能在保证优良跟踪性能的同时最小化跟踪时间和更新率,因此可以实现时间预算消耗的最小化。这种在线解决系统优化问题所涉及的参数数量相当巨大,使得APAR雷达“波形计算”过程极为复杂。
④导弹集成。为了给平台提供尽可能多的同时可用的交战通道,同时又不需要分离的照射系统,APAR雷达使用了一种新型的导弹引导思路——中段引导和间断连续波照射相结合是一种新思路,但要求在走向实战之前需要一系列以风险降低为目标的测试和评估。另外,导弹的自主目标获取也是一项挑战。
尽管APAR雷达系统和技术复杂、功能强大,但仍需在各种实际和虚拟工作中对系统进行评估和验证,这样有助于更好理解和预测系统性能和工作特性。通过在某种工作环境中进行多年的系统评估和鉴定试验,APAR雷达的开发成果可以为客户提供更好地系统性能,为工业部门提供大量的系统开发经验。
2)实际操作使用挑战
多功能雷达为用户带来了很多自由度,用户可以按照一定的规则调整雷达系统以适应各种作战环境。用户无需了解与系统通信的技术细节,但必须能用特定的操作指令来控制系统。为了能发挥多功能雷达的优势,用户必须能将操作指令有效地转换为对传感器系统细节的技术设置。这种转换应该选择适当的传感器管理条令执行,该条令体现于能控制多功能雷达的作战管理系统中。终端用户与工业部门应该协同完成条令的定义工作,因为用户操作和工业技术是完成这项工作的前提条件。
5 启示
现代海军的作战任务逐渐远离了开放的远海环境,更加强调在特定的近海水域执行任务。在这种水域,各种作战任务往往由小型舰艇来完成。因此,多功能雷达系统必须要具备在有限的舰艇空间中将所有作战任务组合在一起的能力,而且要具有较强的应对防御火力和探测严重海杂波下的掠海飞行目标的能力。通常认为,1部I/J波段多功能雷达和1枚中程舰空导弹配合被认为是这种战舰最为理想的系统配置,也是目前I/J波段有源相控阵雷达系统应用的研究焦点。在APAR雷达基础上,一型经济可承受的多功能雷达——“改进型海麻雀”有源相控阵雷达系统(SEAPAR)研制成功。该雷达能根据舰上的应用进行优化,与“改进型海麻雀”导弹(ESSM)配合提升舰艇的对空作战能力。
系统级集成与评估是APAR雷达研发面临的最大挑战。鉴于APAR雷达系统的主要成本在于有源相控阵前端系统,因此,基于APAR雷达已有的前端部件,有针对性地改进APAR雷达已有的系统后端功能,将能使整个雷达系统的开发成本和技术风险最小化。如果对前端部件进行改进将能在降低雷达系统在舰船甲板以上重量的同时提高系统的可伸缩性。将APAR雷达已有的后端与有工程应用价值的、可升级的前端组合在一起,就能开发出适应各种实际应用的新型雷达系统,SEAPAR就是成功案例之一。APAR雷达的上述开发经验如果在实际中得以应用将显著降低多功能雷达的研制工作量和研制周期。
现代多功能有源相控阵雷达从设计到开发成功是一项极具挑战性的工作。APAR雷达的成功为我们提供了一系列值得借鉴的宝贵经验。多功能雷达的自适应能力及其与生俱来的系统复杂性使得系统级集成显得极为关键。模块化和清晰的接口对于系统级集成尤为重要,能最大程度挖掘系统的功能重配置能力,保证系统的高可靠性和高质量。APAR雷达的成功经验被很好地应用在了SEAPAR雷达系统的研制中。SEAPAR雷达完全基于APAR雷达的系统功能,很多时候只需设定和调整某些系统参数,就能对雷达的某些功能重新配置。
[1]GOLSHAYAN A K,van GENDEREN P,et al.Active phased array radar[A].Proc.International Conference Radar,1999.
[2]MARTIN R,TOULGOAT M.Multifunction radars in the NAAWS tradition[R].Defense Research Establishment Ottawa,report No.1309,1997.6.
[3]ARECCHI A,ROVETTI F,SCARPA S,et al.Rapporto tecnico studio algorithm multi-radar-tracking[R].Alenia Marconi Systems(AMs)Naval Division,Contract no.18523,1999.
[4]Jane's corporation.Jane'sRadarandElectricWarfare Systems(2007-2008)[M].UK,2007.
[5]Ronald O'Rourke,Naval Transformation:Background and Issues for Congress[EB/OL].http:/assets.opencrs.com/ rpts/RS20851,2009.
