排除虚假交叉定位点的新方法
2012-03-04李彬彬冯新喜王朝英
李彬彬,冯新喜,王朝英,文 曦
(1.空军工程大学电讯工程学院,西安 710077,2.沈阳军区空军司令部,沈阳 110015)
排除虚假交叉定位点的新方法
李彬彬1,冯新喜1,王朝英1,文 曦2
(1.空军工程大学电讯工程学院,西安 710077,2.沈阳军区空军司令部,沈阳 110015)
多站测向交叉定位法是无源定位方法中应用较多的一种,但该方法易产生大量虚假定位点。针对这个问题,提出了一种排除交叉定位中虚假点的新方法。该方法以两个观测站为主站,其他观测站为辅站,利用辅站数据对主站数据进行筛选及反馈从而快速排除两主站中的虚假点。仿真结果表明,该算法能够快速、准确地排除虚假定位点。
多站,交叉定位,虚假点
引 言
无源定位系统由于其本身不发射电磁波,因此较主动传感器具有抗干扰能力强、隐蔽性好等优点。测向交叉定位法是无源定位系统中应用较多的一种。通过高精度测向设备在多个观测站对目标进行测向,各个测向线的交点就是目标的位置。在复杂环境下采用两个以上的观测站对多目标进行测向交叉定位,不同测向线相交将产生大量虚假定位点,而且虚假定位点的数量随着观测站和目标数目增多而急剧增多。如何快速、准确地排除这些虚假定位点一直是多站测向交叉定位研究中的难点。最小距离算法是目前较常用的排除虚假目标的方位数据关联方法。最小距离算法单纯地利用不同观测站测向线之间的各个交叉定位点的几何距离信息进行方位数据关联,即两两观测站计算出的交叉定位点中,距离最近的点最有可能对应同一目标。由于观测站和目标的几何位置及观测站测向误差的影响,距离最小的定位点构成的关联区域并不一定对应正确的目标,因此最小距离算法的错误关联概率较大。
本文借鉴文献 [1]的思想提出了一种利用多观测站排除交叉定位中虚假交点新方法,该方法选择两个观测站为主站,其他观测站为辅站,在选定的基准线上通过检验统计量筛选候选点集,并依基准线顺序逐步递减候选关联数目,从而使计算量大大减少,并且通过各测向线之间的相互约束使正确相关率得到了提高。
1 交叉定位基本原理
设目标P位于x-y平面内,坐标设为(xP,yP)。观测站 1和观测站 2的坐标分别设为(x1,y1)和(x2,y2)。设θ1k和θ2k分别为观测站 1的第k条测向线和观测站2的第l条测向线所测得的目标方位角。这两条测向线相交于点(x,y),由于观测噪声的存在,点(x,y)与 P点坐标(xP,yP)并不重合,由图 1所示。假设各个传感器之间的测量是相互独立的,测量误差服从零均值高斯分布。

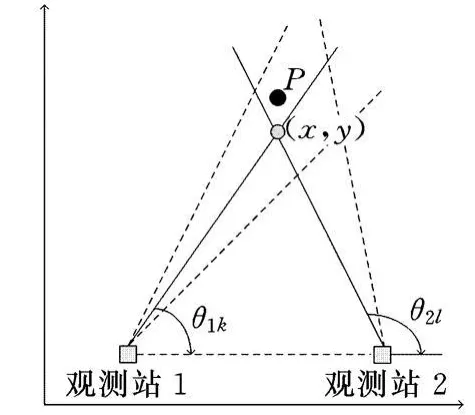
图1 交叉定位原理
由上述方程可得出任意两测向线交点的位置坐标。
用θi表示观测站i对目标P的测向方位角,ni为第i个观测站的观测噪声(i=1,2),则:

此时目标P处于平面空间的第 1象限;
当 yP-yi> 0,xP-xi<0时:

此时目标P处于平面空间的第 2象限。
2 算法描述
为解决最小距离算法仅根据距离最小的交叉定位点进行关联误差较大的缺点,本文提出一种改进算法。核心思想为:对于两两交叉定位点,利用判决门限判决检验统计量代替最小距离准则进行关联。从而增大了候选关联组合的范围,减少了漏判、误判的概率;再通过其他测向线上候选关联组合的信息对上一层关联进行反馈检验,提高了关联的正确性。算法具体步骤如下:
1)假设二维平面内有3个观测站,M个目标。将观测站1对M个目标的M条测向线排列编号,如对第j个目标的测向线记为L1j(j=1,2,… ,M)。
分别计算观测站 1与观测站2,观测站1与观测站3所有测向线的交点,每两个观测站的交点数目最多有M2个。将这M2个交点按照M条测向线分为M个点集。则在第L1j条测向线上,观测站1与观测站2的交叉定位点集记为{d1j,2l= (x1j,2l,y1j,2l)},(j,l=1,2,… ,M);观测站 1与观测站 3的交叉定位点集记为 {d1j,3k= (x1j,3k,y1j,3k)},(j,k= 1,2,… ,M)。
2)首先找出L11上的候选关联组合。 L11上,两交叉定位点集分别为:{d11,2l= (x11,2l,y11,2l)},{d11,3k=(x11,3k,y11,3k)}(l,k=1,2,… ,M)。 由于测量误差的存在 ,{d11,2l}与 {d11,3k}并不重合 ,且 {d11,2l}与 {d11,3k}中分别只有1个点对应正确的候选关联组合。
计算点d11,2l和 d11,3k的几何距离

选择适当门限G,若Dlk<G,则将该候选关联组合保留,并记下相应的测向线序号R{1,l,k};然后依次找出所有满足Dlk<G的候选关联组合,组成候选关联集合A1。通过此方法筛选候选关联组合有时并不只得到一个候选关联,符合Dlk<G的候选关联组合均被选入,因此较最小距离算法可扩大筛选范围,减少漏判误判。
3)比较 A1中各候选关联组合 R{1,l,k}中点d11,2l与点d11,3k的几何距离,先假定距离最小的候选关联组合对应真实目标,记为 R{1,l′,k′}。
确定出L11上的目标后,可将测向线 L2l′上的其余点排除。如图 2所示,在 L11上确定出 P1后,将 L2l上的q1、q2点排除。

图 2 改进算法中虚假点排除的原理
4)继续在L12上找出候选关联组合
利用步骤2和步骤3找出候选关联集合A2。此时若无满足Dlk<G条件的候选关联则需在上一层中重新选择另一满足条件Dlk<G的候选关联组合重新进行关联。
5)分别在观测站 1的其他测向线上利用步骤 2~步骤 4的方法计算出L1j(j=3,4,… ,M)上的候选关联组合,最终确定出所有对应目标的M个候选关联组合。
本文提出的方法相比于最小距离法扩大了候选关联组合的范围,使之不仅仅限于几何距离最小的定位点,同时根据不同测向线上的反馈信息对上一层确定出的候选关联组合进行检验,进一步提高了关联的正确性。在该算法中,门限G的选取极为关键。若G选的过大,则符合条件的候选关联较多,判决效率低且易产生错判,若G选的过小,则易产生漏判,正确关联概率同样得不到提高。
3 仿真分析
1)设定仿真环境
假设二维平面内有 3个观测站,其坐标分别为(-10 km,0 km),(0 km,0 km),(10 km,0 km);3个目标的坐标分别为目标 1:(-5 km,60 km),目标2:(-5 km+d,60 km),目标 3:(-5 km+2d,60 km),d为可调节参量,其大小决定目标间的疏密程度。假设每个观测站具有相同的测角误差。分别对最小距离算法和本文的改进算法进行 1 000次蒙特卡洛仿真。
2)仿真结果分析
表1~表 3为两种算法分别在测角误差标准差为 0.5 m rad、1m rad、2 m rad时对应各目标在不同位置时的方位关联正确率。算法 1对应最小距离算法,算法2为本文提出的改进算法。判决门限为G=10 km。

表 2 标准差eθ=1m rad时两种算法正确关联概率的比较

表 3 标准差eθ=2m rad时两种算法正确关联概率的比较
4 结 论
分析比较两算法得出的仿真数据,可以得出下列结论:
1)观测站的测角误差越小,两种算法的正确关联概率越高,随着观测站的测角误差增大,两种算法的正确关联概率都有所降低。
2)在观测站测角误差相同的情况下,目标间距越大,关联的正确率越高。因为,当目标密集时,即使较小的测向误差都将对定位的位置和距离产生较大影响。这种影响对于最小距离算法尤为明显。当间距d=6时,不同误差条件下的关联概率较其他间距时非常低,关联效果很差;当目标稀疏时,这种影响减弱,因此正确率提高。
3)当测角误差较低时,改进算法的正确率非常高。因为,由于应用判决门限对候选关联进行筛选,将大部分距离较远的点排除,同时保留了一些而不仅仅是一个可能的关联组合,这样较最小距离算法有了更高的可靠性。以eθ=0.5m rad时为例,在观测站 1的第 1条测向线中的 9个候选关联组合中有 3个、4个满足Dlk<G,正确的组合有时并不对应最小距离,但仍然被保留下来,分别通过第 2条测向线对第1个候选关联集合的约束和第3条测向线上对第2个候选关联集合的约束排除了不可能的虚假点,从而使正确关联概率大大提高。
4)当测角误差较高时,改进算法中,满足门限G的候选关联组合增多,因此各测向线对上一层的候选关联组合的约束作用减弱,正确关联概率不及误差较小时的结果,但相比于最小距离算法仍有很大提高。
5)当上一层出现错误关联而下一层关联并未检验出来时,将导致错误关联概率的增多。但实验数据表明,这种情况发生的概率较低,即不同测向线之间的约束作用远远大于同时发生错误的可能,说明本文提出的改进方法是可行的。
[1] 李立萍,孟 静,陈天麒.一种排除无源交叉定位虚假交点的新方法[J].系统工程与电子技术,1999,10(4):20-23.
[2] 修建娟,何 友,王国宏,等.被动定位系统中的方位数据关联 [J].系统工程与电子技术,2003,14(3):280-283.
[3] 陈 玲,李少洪,黎 莉.三位空间被动传感器的快速数据关联算法研究 [J].电子学报,2005,43(9):1549-1592.
[4] 李良群,姬红兵,刘进忙.被动传感器系统模糊-概率双加权数据关联新算法 [J].系统仿真学报,2006,26(10):2898-2902.
[5] Terrieri D J.Statistica l Theory o f Passive Location Systems[J].IEEE Trans,1984,AES-20:183-198.
A New Method for Elim inating False Intersection Points
LIBin-bin,FENG Xin-xi,W ANG Zhao-ying,WEN X i
(1.Telecommunication Engineering Institute,Air Force Engineering University,X i'an 710077,China,2.Shenyang Air For a Command,Shenyang 110015,China)
In all methods of passive location to get information of targets,passive cross location of m ultip le sensors is very popular.How ever,thismethod will produce a lot of false intersection points.To solve this problem,a new method for eliminating false intersection points is presented.Themethod uses two sensors as the primarym easures and the other as the assistant.Thedata from theassistant sensors is used to filtrate and feed back the data of the prim ary sensors so that the false intersection points can be eliminated more quick ly and correctly.Sim ulation results show that the p roposed algorithm can eliminate the false in tersection points fast and effectively.
multi-sensors cross location,false points
TN 953
A
1002-0640(2012)03-0190-04
2011-01-15
2011-03-04
李彬彬 (1982- ),女,辽宁庄河人,硕士 ,研究方向:异类传感器信息融合,被动传感器定位与跟踪。
