航迹导航系统介绍
2012-01-22
(南通中远川崎船舶工程有限公司,江苏 南通 226005)
随着航运事业的飞速发展,船舶自动化程度的不断提高,如何高效的操船,如何减轻船员的负担,如何减少人为操作失误导致的事故等,越来越多的受到业界和船东的关注。航迹导航系统(track control system, TCS)越来越多地受到船东的青睐。
1 规范要求及配置现状
在国际海事组织下属的海上安全委员会(海安会)第73界会议上,通过了MSC.99(73)决议,对SOLAS进行了修正。修正后的SOLAS第5章第19条2.8.2要求,1万总t以上的船需要配置1套艏向或航迹控制系统,或其它装置,用于自动控制和保持艏向和/或直航迹。
船厂设计标准,仅要求配置艏向控制系统(heading control system,HCS),船上都通过自动舵来实现该功能。但近来越来越多的船东为减轻船员负担、提高船舶自动航行功能,会要求船厂在配置HCS的基础上增加航迹控制系统(TCS)。
要实现TCS功能,船上除了自动舵等SOLAS必须配置的导航设备外,还必须加装非SOLAS强制要求安装的电子海图(ECDIS)。配置了TCS功能后,一般在大洋上的开阔水域,船员可以在ECDIS上设置航迹点,通过ECDIS接收到的艏向、船位、船速、风速风向等信号,得出目前航迹和预设航迹之间的偏差,在ECDIS内部进行计算,然后由ECDIS向自动舵(即艏向控制系统)发出调整艏向的信号,控制船舶在各航迹点之间的自动航行。可以看出,TCS功能可以有效减轻船员负担,不用安排船员持续控制自动舵,实现了自动调整航向保证航迹的功能,有效提高船舶航行的自动化程度。
国际海事组织下属的海上安全委员会(海安会)第69界会议通过了决议MSC.74(69),其中附件2是航迹控制系统性能标准建议案,明确了航迹控制系统(TCS)的具体要达到的性能标准。与之配套的,IEC颁布了IEC 62065:2002航迹控制系统的检验标准。
2 具体分类及特点
2.1 具体分类
在TCS检验标准中,对航迹控制系统分为三类:Category A、Category B、Category C。
1)Category A。仅实现两个航迹点间及多个处于同一条直线上的航迹点之间的航迹导航,简言之就是只实现直线上的导航,理论航线就是一条直线,不存在拐点,在航线上会对船舶偏移预计航线距离进行监测,如超出,会发出警报,如需转向,必须切换到手动操舵或HCS,具体见图1。
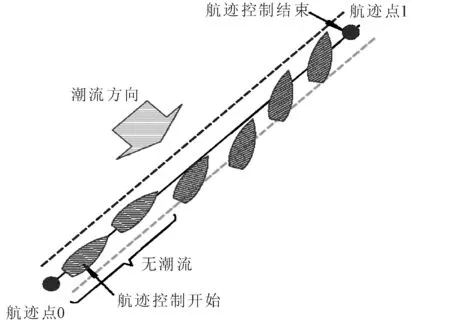
图1 TCS Category A航迹示意
2)Category B。在完全满足Category A的基础上,可以实现多个航迹点之间折线航线的半自动导航,但在拐点处的拐弯需要人工辅助,且拐弯仅基于预设好的拐弯半径或转向速率,而不考虑船位、船速、风速、艏向等因素的影响,见图2。
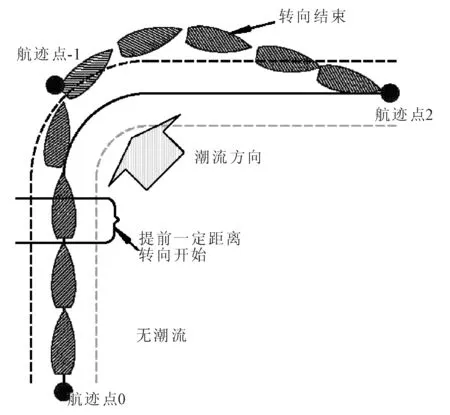
图2 TCS Category B航迹示意
3)Category C。 在完全满足Category A的基础上,可以实现多个航迹点之间折线航线的全自动导航,在拐点处的拐弯全自动完成,不需要人工辅助,系统会通过对各输入参数(如船位、船速、风速、艏向等)的计算,自动调整舵角,实现平滑拐弯,全航线对船舶偏移预计航线距离进行监测,如超出,会发出警报,见图3。
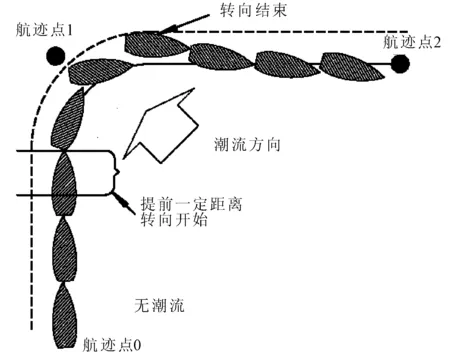
图3 TCS Category C航迹示意
3 常用厂家配置情况
具体配置哪种Category,需要ECDIS及HCS(自动舵)厂家联合研制、开发、申请、取证。从常用的厂家配置来看(见表1),目前主流厂家一般按照Category C来配置;也有一些厂家按照Category B来配置;对Category A,由于局限性太强,实际使用意义不大,且Category B、C均已包含Category A的所有功能,所以一般厂家都不考虑仅配置Category A型的TCS。
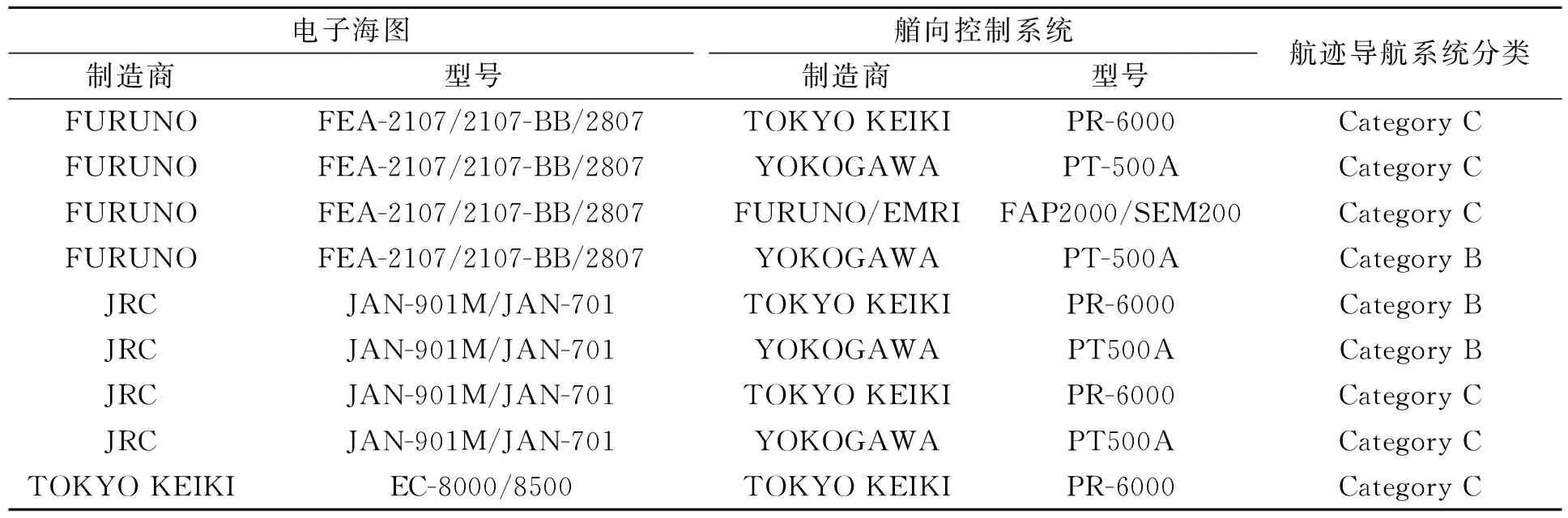
表1 航迹导航系统常用厂家配置
4 实船试验
由于TCS功能涉及船舶的航行安全,船级社均要求船舶在海试时对TCS功能进行演示报验。以某船(TCS CATEGORY C,船级NK,ECDIS厂家JRC,HCS厂家TOKYO KEIKI)为例,介绍主要的验证要点。
1)预设航迹,见图4。
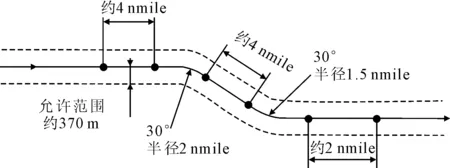
图4 海试试验预设航迹
2)在第一段转向区间(first wheel-over line)验证。
①在船舶开始转向至少1 min前,ECDIS发出“early course change indication”报警。
②在开始转向时,ECDIS 发出“actual course change alarm”报警。
3)在第二段转向区间(second wheel-over line)验证。
在开始转向接到ECDIS 发出“actual course change alarm”报警后,如果30 s内不进行确认操作,确认一下设置在船长房间的“back-up naviga tor alarm”报警是否发出。
4)确认在每个转向区间内船舶偏离理论航线距离最大的点和理论航线的垂线间距,即最大偏航距离(maximum cross track distance)。
5)在第二段转向区间后,切断送至ECDIS的GPS信号,确认TCS系统是否自动切换至HCS系统,同时确认船舶是否按之前HCS系统设定的艏向保持航行。
6)结果记入表2。
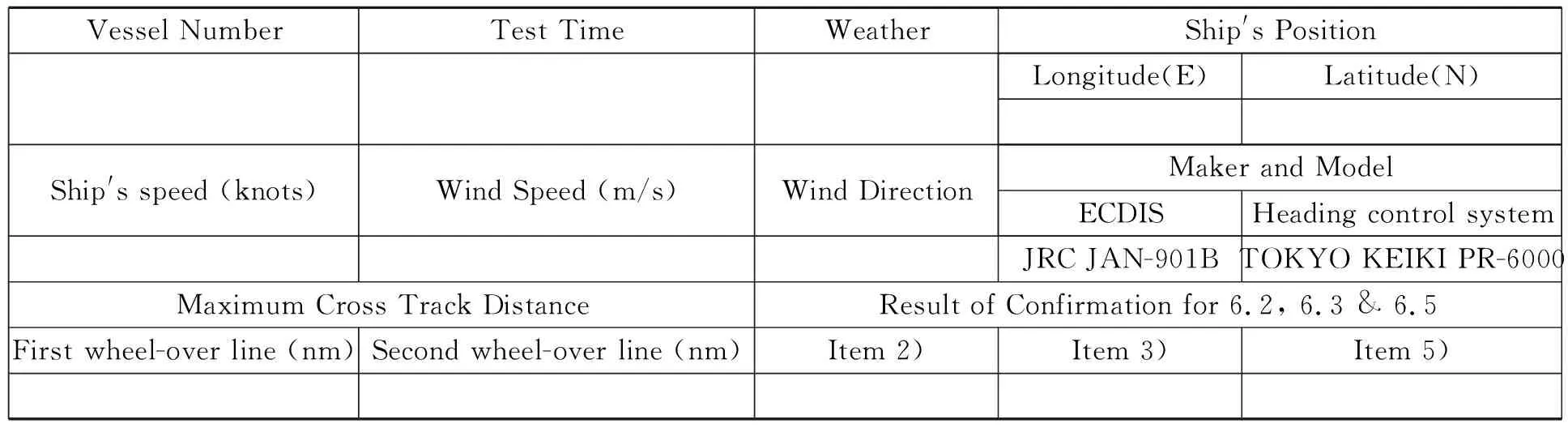
表2 航迹导航试验记录
5 结束语
国际海事组织下属的海上安全委员会(海安会)第86界会议通过了MSC.282(86)决议,对SOLAS进行了修正。修正后的SOLAS第5章第19条2.10要求,从2012年7月1日开始(不同类型、总吨的船舶要求的时间不同),各种类型的新船均要求安装ECDIS,对旧船也有追溯安装ECDIS的要求。从该要求来看,安装ECDIS也被业界公认,今后船舶营运也会越来越多地依赖电子海图这类电子信息,电子化、自动化程度要求会越来越高。而TCS的必要前提就是船上必须配置ECDIS和HCS,现在两者都已强制安装了,也就是说船上要实现TCS功能的基础已完备,预计今后会有越来越多的船东要求配置TCS,而且IMO也很可能强制要求配置TCS,TCS的配备将是大势所趋。而对于TCS的三种分类,考虑自动化程度及便利性,应该按照CATEGORY C来配置。