基于椭球拟合的微惯性测量组合现场快速标定方法*
2011-10-20范玉宝张晓明田晓春
范玉宝,李 杰,张晓明,田晓春,刘 俊
(中北大学电子测试技术重点实验室,太原 030051)
大量试验表明,随着时间推移和环境温度变化,微惯性测量组合中惯性器件的安装误差不会产生较大变化,而惯性器件自身性能参数会发生变化[1]。其中惯性器件的零偏漂移表现尤为明显,每次上电工作时都会有所不同,并且随着时间的推移变化会不断加剧。
众所周知,加速度计和陀螺仪的零偏对导航和定位的误差影响分别按时间的二次和三次方增长。由此可见,微惯性测量组合试验室准确标定参数如果应用于后期的实际测试当中,会产生较大解算误差,降低微惯性测量组合的测试精度[2-4]。因此微惯性测量组合需要在短期内具有较高的精度,急需一种能够在微惯性测量组合使用前现场快速准确标定的方法[5-6]。
目前微惯性测量组合标定方法往往需要精密分度头和三轴转台提供方向基准和位置基准,应用八点测试法及定轴定速法标定微惯性测量组合。离开这些精密实验设备就直接导致微惯性测量组合在实际使用前很难有条件进行现场准确标定,只能进行现场简易标定[7-8]。简易标定主要在加工好的工装上进行,以加速度计零偏标定为例,仅仅是寻找两个完全对称位置对于系统的使用者来说就难以做到[9]。总而言之,现有的微惯性测量组合标定方法依赖实验室设备,操作复杂,费时,精度低,难以满足微惯性导航系统实际应用的需求。针对上述问题,本文提出了一种不依赖精密仪器提供方向基准和位置基准,简易可行的微惯性测量组合现场快速标定方法。
1 微惯性测量组合现场快速标定原理
1.1 静态输出特性分析
微惯性测量组合中加速度计和陀螺标定原理和方法基本类似,本文以其中加速度计标定为例进行说明,以下不再累述。
在微惯性测量组合中,考虑到安装误差及加速度计横向效应,因此在标定时引入轴间的交叉耦合标度因数kij,表示i轴方向加速度影响j轴加速度计输出而引起的标度因数,即完善后的微惯性测量组合输出模型为[10]:
从模型可以看出待标定参数较多,增加了现场标定的计算量。考虑到轴间耦合标度因数kij本身很小,短期内变化量微乎其微,由此产生的影响很小。因此实际应用中可以使用最近转台精确标定结果^kij近似代替,现场标定时可以只对影响较大的加速度计轴向标度因数(kxx、kyy及kzz)和零偏(ux0、uy0及uz0)进行标定。优化后的微惯性测量组合输出模型为:
当纬度和海拔固定时,可以认为当地重力加速度为常值。因此在理想条件下,静止放置的理想正交三轴捷联配置加速度计可以测得对应三个轴向加速度分量,而且以该加速度分量为坐标的点在测量坐标系中构成一个圆心在原点,半径为当地重力加速度的球体。即:

其中,g为当地重力加速度,
由上式可以变换为如下二次标准型方程:

即三个轴向加速度计测量电压值满足一个广义标准二次球体曲面方程,其几何意义是以三轴加速度计测量电压值为坐标的点在测量坐标系中位于一个由上式确定的球体曲面上,且该球体的几何中心对应为加速度计零偏。实际上,由于加速度计轴向间的非正交性以及测量误差的存在,测得的三轴加速度计输出电压在测量坐标系中形状畸变成椭球体,但其几何中心仍为相应的加速度计零偏。
1.2 现场快速标定模型
椭球曲面的一般方程为[11-12]:

其中,ξ=[a,b,c,d,e,f,p,q,r,l]T为待求的椭球曲面参数向量;Z=[x2,y2,z2,2xy,2xz,2yz,2x,2y,2z,1]T为测量数据的运算组合向量,F(ξ,Z)为测量数据(x,y,z)到该椭球曲面F(ξ,Z)=0 对应点的代数距离。椭球曲面拟合时,一般选择测量样本数据到椭球曲面代数距离的平方和最小为判断准则

D=[Z1Z2…ZN-1ZN]T,N是样本点数。将拟合后的椭球方程式整理为矢量形式即(X-X0)T×S(X-X0)=1,展开:

解方程组得到待标定参数最终的计算表达式如下:
1.3 现场快速标定方案
综上所述,基于椭球约束的最小二乘法拟合理论制定出标定方案如下:①在待标定固定位置点准确测量当地重力加速度(地球自转角速率);②在该测量点随机旋转微惯性测量组合,使其姿态位置跨度尽量覆盖拟合椭球体所在三维空间范围,在每个测试位置静止采集20 s得到一系列不同姿态下微惯性测量组合输出电压值;③由步骤②中得到的输出电压值拟合椭球曲面,获得最佳椭球拟合参数;④将拟合得到的椭球方程整理为广义二次标准型椭球方程,获得椭球形状特征矩阵S和椭球中心坐标X0,并求出S-1;⑤计算微惯性测量组合全部待标定参数;⑥利用标定参数,完成微惯性测量组合输出标定。
2 试验分析
为了验证该标定方法的可行性及有效性,本文以实验室自组微惯性测量组合为测试平台进行试验对比分析。实验室自组微惯性测量组合由三个Model1221系列加速度计和三个ADRXS300系列陀螺仪组成。为简化试验过程,在环境温度以及湿度不变的情况下,只考虑时间变化对微惯性测量组合标定参数的影响。
试验中,首先通过三轴多功能速率位置转台(图1)对微惯性测量组合进行精确标定,得到其全部待标定参数(表1)。
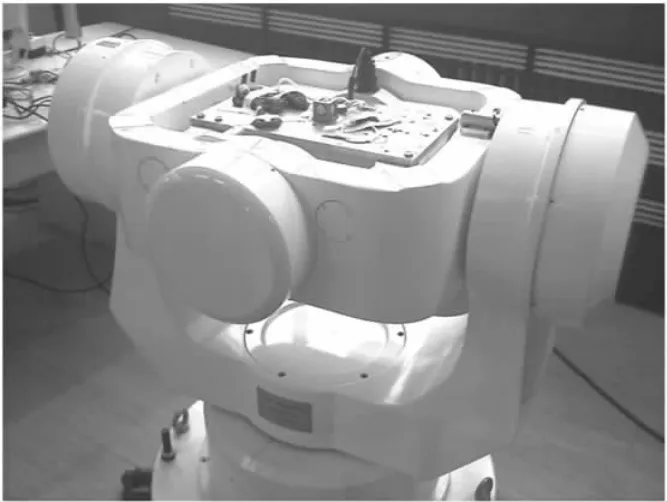
图1 三轴多功能速率位置转台
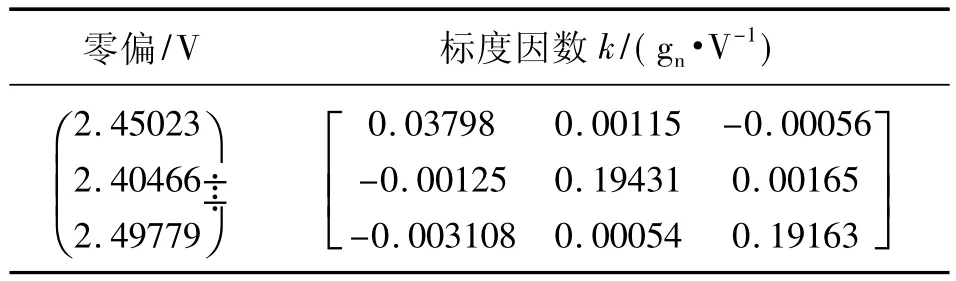
表1 前期转台加速度计标定结果
30天后,依照上述现场快速标定方案采集该微惯性测量组合23个不同姿态下的输出电压,对其进行基于椭球约束的最小二乘法拟合,得到如图2所示椭球体方程,进而结合前期标定结果得到此时微惯性测量组合全部待标定参数,如表2所示。
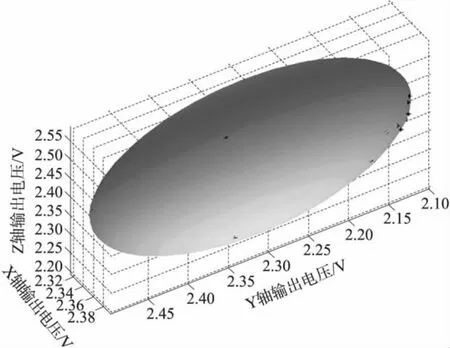
图2 拟合椭球曲面
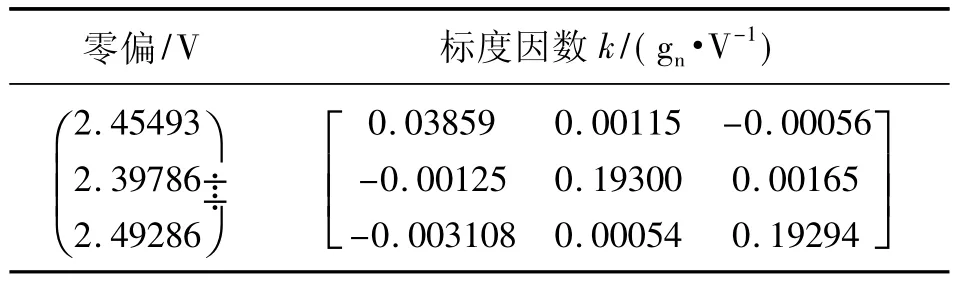
表2 30天后现场快速标定结果
于此同时,通过转台现场对该微惯性测量组合进行精确标定,得到的全部待标定参数如表3所示。
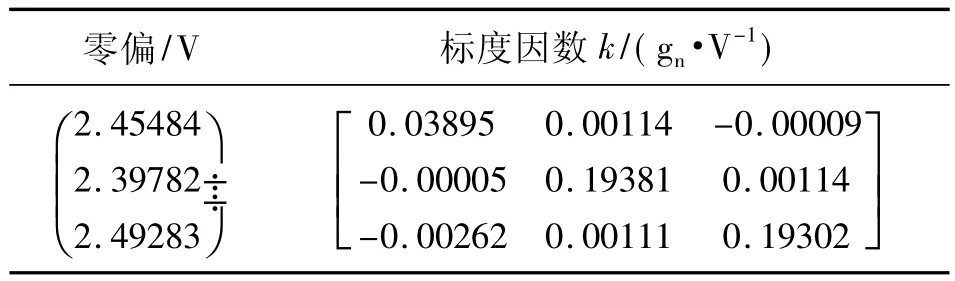
表3 30天后转台标定结果
综合分析表1、表2和表3,我们发现随着时间推移加速度计零偏产生较大波动,标度因数次之且轴向间交叉耦合标度因数变化极小。上述结论印证了该现场标定模型优化的可行性。对比表2和表3发现,现场快速标定结果与转台标定结果更为接近,而标度因数由于存在模型简化存在一定程度的计算误差。
当微惯性测量组合x轴和y轴感受加速度为零,z轴敏感重力加速度状态下,首先将30天前转台准确标定参数用于微惯性测量组合输出补偿;然后分别将现场快速标定和现场转台标定得到的待标定参数应用到微惯性测量组合输出补偿,经过标定后三个轴向加速度计输出对比曲线如图3所示。随着时间推移,如果用30天前转台标定参数对微惯性测量组合标定会产生较大误差,而现场快速标定精度与现场转台标定相比有所下降,但随着椭球拟合采集样本数量增加,尽量覆盖拟合椭球体所在三维空间范围其在总体上能够很好逼近转台精确标定效果。
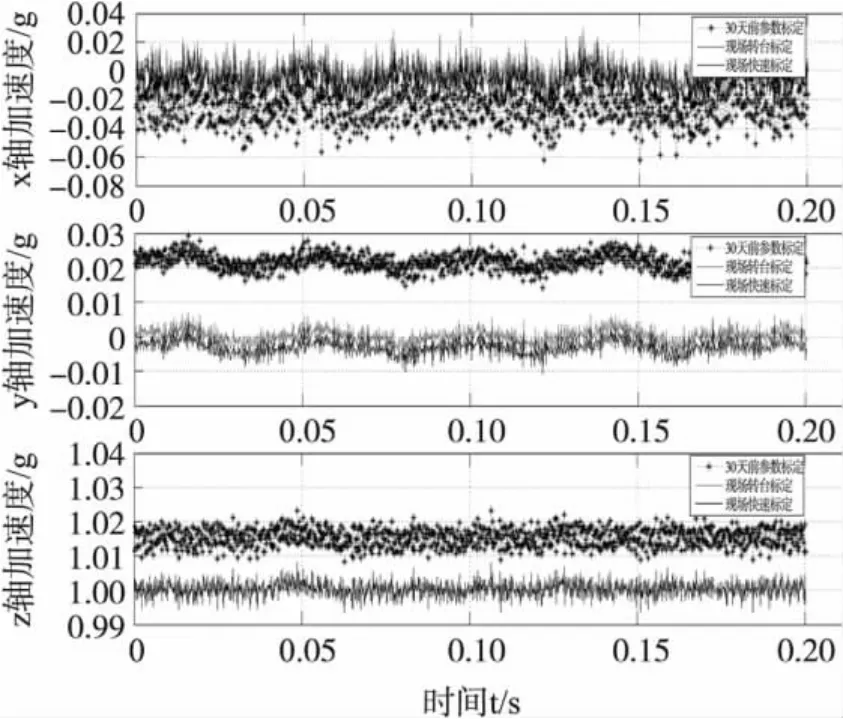
图3 微惯性测量组合加速度计输出标定效果比较
值得一提的是,上述方法也存在一定应用局限性。对于微惯性测量组合中陀螺标定而言,分辨率较低的常规微陀螺无法精确敏感到地球旋转角速率(即15°/h),此时将陀螺静态输出认为就是其零偏,依照上述标定方法完成其余待标定参数计算,这必然就会引进计算误差,从而使最终标定结果精度较低。
3 结论
微惯性测量组合现场标定是提高惯性测量系统测试精度的有效途径之一。本文提出了一种微惯性测量组合现场快速标定方法,该方法在建立合理标定模型基础上,寻找一组最佳的拟合椭球参数,使得以惯性器件测量电压值为坐标的点与拟合椭球上相应点之间的代数距离平方和最小,即进行基于椭球约束的最小二乘法拟合,进而利用拟合得到的椭球曲面参数求出惯性器件的标度因数和零偏,然后对微惯性测量组合输出进行标定补偿,达到更为准确的测量效果,最后对该方法的应用局限性进行了分析。试验结果表明,所提出的微惯性测量组合现场快速标定方法具有操作方便、省时、精度高,不依赖精密仪器提供方向基准和位置基准等特点,满足了微惯性测量系统实际应用中短时间高精度的测试需求,具有很强的工程应用价值。
[1]刘俊,石云波,李杰.微惯性技术[M].北京:电子工业出版社,2005:296-300.
[2]Park Minha.Error Analysis and Stochastic Modeling of MEMS Based Inertial Sensors for Land Vehicle Navigation Applications[D].Department of Geomantics Engineering,2004.
[3]刘锡祥,徐晓苏.惯性测量组件整体标定技术[J].中国惯性技术学报,2009,17(5):568-576.
[4]Kim A,Golnaraghif M F.Initial Calibration of Inertial Measurement Unit Using an Optical Position Tracking System[C]//Position Location and Navigation Symposium,2004:96-101.
[5]冯志刚,邹颖.整箱不开箱的惯导系统射前小姿态标定方法[J].中国惯性技术学报,2009,17(1):33-37.
[6]Seong Yun Cho.Calibration of a Redundant IMU[R].AIAA2004-5123.2004.
[7]Theresia C Becker.Approches to Optimal Inertial Instrument Calibration Using Slewing[D].Boston:Boston University,2003.
[8]刘百奇,房建成.一种改进的IMU无定向动静混合高精度标定方法[J].仪器仪表学报,2008,29(6):1250-1254.
[9]赵忠.加速度计零偏测量的一种新方法[J].压电与声光,2000,22(6):420-422.
[10]李杰,洪惠惠,张文栋.微型惯性测量组合标定技术[J].传感技术学报,2008,21(7):1170-1173.
[11]张晓明,赵剡.基于椭圆约束的新型载体磁场标定及补偿技术[J].仪器仪表学报,2009,30(11):2439-2443.
[12]张晓明.地磁导航中磁测误差补偿技术研究[D].北京:北京航空航天大学,2009:112-117.
