基于贝叶斯估计的加权最小二乘分布式融合
2011-08-27徐苏,杨红
徐 苏,杨 红
(1.淮海工学院工程训练中心,江苏 连云港 222000;2.广州大学物理与电子工程学院,广东 广州 510006)
0 引言
多传感器信息融合技术广泛应用于军事、国防、目标跟踪、GPS定位、机器人、信号处理、通信、控制等领域,目前成为备受人们关注的热门领域。信息融合的目的就是将多传感器信息进行有效地处理,从而得到比单一传感器更加精确的结果。对于基于Kal man滤波的多传感器观测数据融合,主要有状态融合和测量融合。测量融合可分为集中式融合和分布式融合[1]。
文献[2]提出了不同观测矩阵的最小二乘数据融合算法,文献[3]提出了按对角阵加权的最小二乘数据信息融合算法,文献[4]对按矩阵、对角阵、标量3种加权方法进行了比较,文献[5]将算法扩展,提出了不同观测矩阵加权最小二乘算法,但这些方法的一个共同缺点是没有考虑到模型参数本身的信息,因此深入研究基于贝叶斯估计的带不同观测矩阵的加权最小二乘分布式融合Kal man滤波算法,可以提高融合算法的性能,非常有实际意义。
1 卡尔曼滤波和贝叶斯估计
1.1 非线性卡尔曼滤波系统
1960年,卡尔曼发表了用递归方法解决离散数据线性滤波问题的论文。得出系统的状态随机差分方程,用如下状态空间模型描述的动态系统:

式中,t表示离散时间,系统在时刻t的状态X(t)∈Rn,W(t)∈Rr为输入白噪声,Y(t)∈Rm是对状态的观测信号,v(t)∈Rm为观测噪声。F、G和H 分别为n×n、n×r和m×n的己知矩阵,分别称F为状态转移矩阵,G为过程噪声分布矩阵,H为观测矩阵称式(1)为状态方程,称式(2)为观测方程。
如果存在多个观测方程,就涉及到如何利用多个观测数据得到最优的状态X(t)的问题。这涉及到数据融合问题,最小二乘估计是一种常见的融合方法[6]。
而对于非线性系统的卡尔曼滤波问题,一般需要在线性滤波理论的基础上,通过线性化处理,构成解非线性滤波问题的次优滤波算法来处理这类问题。目前广泛使用的是推广的离散卡尔曼滤波,这种方法不同于线性化离散Kal man滤波,即不需预先算出状态矢量的理想轨迹,而预先算出状态矢量的理想轨迹在实际工作中可能会遇到困难[7]。
1.2 最小二乘估计
考虑线性模型

的参数β和σ2的估计问题,最小二乘估计的思想是β的真值是使e=Y-Xβ达到最小,也就是其长度平方

达到最小,则得到β的估计为

1.3 贝叶斯估计
贝叶斯理论提供了一种计算假设概率的方法,基于假设的先验概率、给定假设下观察到不同数据的概率以及观察到的数据本身,来计算后验概率一般地,设θ为未知参数(可以为向量),它的验前密度记为π(θ),Y为观测量,于是在获得观测之后,θ的验后密度由Bayes公式给出[8]。

式(3)中,f(Y/θ)为θ给定时Y 的概率密度函数,Θ为θ的参数空间。在进行Kal man滤波融合时,考虑模型参数本身的先验信息条件,应用贝叶斯估计可以提高融合精度。
2 基于贝叶斯估计的非线性离散系统的加权最小二乘分布式融合
实际上,绝大多数情况下Kal man滤波系统都是非线性系统,因此考虑非线性系统的数据融合问题,具有很强的现实意义。由于非线性系统的复杂性,本文先采用推广的离散卡尔曼滤波对非线性系统线性化,在线性化基础上,提出基于Bayes估计的加权最小二乘分布式融合。
2.1 非线性离散系统的线性化
实际应用中,许多系统并非完全线性,因此不同观测阵的随机非线性离散多传感器系统模型可描述为:

式(4)中,t为离散时间,X(t)∈Rn为状态,Yi(t+1)∈Rmi为第i传感器在t+1时刻的观测值,vi(t+1)∈Rmi为第i传感器在t+1时刻的观测噪声,W(t)∈Rr为输入白噪声,f(·),g(·)和hi(·)对X(t)是可微的。对于式(4),可以采用推广的离散卡尔曼滤波进行线性化处理。
假设1:W(t)∈Rr和vi(t)∈Rmi(i=1,…,L)为零均值不相关高斯白噪声,且vi(t)和X(t)不相关,而vi(t)和vj(t)(i≠j)是相关观测高斯白噪声,则

式(5)中,E为均值号,T为转置号,δtt=1,δth=0(t≠h),Q>0。如果在t时刻,状态矢量X(t)的线性最小均方误差估计X^(t)已知,那么就可以把系统信号模型式(4)在X(t)=X^(t)附近展开成泰勒级数,取其一次项,其中,离散状态一步预测为:

并认为g(X(t),t)=g(X^(t),t),这样离散系统的信号模型可以写成和


假设2:假设存在非奇异的矩阵

式中定义

2.2 基于贝叶斯估计的带不同观测矩阵的加权最小二乘分布式融合
在得到线性化的离散状态方程和观测方程后,为了提高观测精度,可对式(10)的L个观测方程进行观测融合,对此本文采用基于Bayes估计的最小二乘方法对观测方程进行观测融合。
在对Kal man滤波观测方程进行最小二乘观测融合时,如果知道观测值X(t+1)的验前信息,可以应用Bayes估计,得到基于Bayes估计的X-(t+1)的估值表达式

式中:


式(11)中,Y-BEWLS(t+1)=Y~BEWLS(t+1)-BBEWLS(t+1)。由RBEWLS(t+1)=E(v(t+1)vT(t+1)),可以求出高斯白噪声vBEWLS(t+1)的方差阵为

对式(6)和式(11)应用 Kal man滤波算法[3]可得基于Bayes估计的分布式观测融合Kal man滤波器(t|t)和预报器(t+1|t)及其相应的误差方差阵MBEWLS(t+1|t)和MBEWLS(t+1)。
3 比较与仿真
3.1 两种加权最小二乘分布式融合卡尔曼滤波器算法的比较
为了说明本文提出的算法具有的优点,将本文的算法和文献[5]提出的方法进行比较,文献[5]提出基于WLS算法的分布式观测融合Kal man滤波算法,其融合方程,即X-(t+1)的估值表达式

式(12)中:
2)联合制动系统是目前提高重载钻机车复杂路况行驶安全的最有效办法,该系统可承担全部的低强度制动和大部分的正常制动,从而确保最大的安全性,帮助驾驶员获得较高的平均驾驶速度从而缩短转运周期。

WLS融合算法是无偏估计,但从统计决策的观点来看,对于无偏的要求并不总是必要的,而可以用下列的概念来评价融合算法。
定义1:设Z为随机向量,分布依赖与未知参数向量θ,记d(Y)为θ的一个估计,这里Y表示Z的样本。记L[θ,d(Y)]为非负函数,它表示真实参数为θ,而以d(Y)作为它的估计时引起的损失,称为损失函数。令

它表示真实参数为θ时,关于Y的分布所取的期望值。称R(θ,d)为风险函数。如果对所有θ满足

则称估计d1至少和d2一样好。如果

以及R(θ,d1)<R(θ,d2)至少对某个θ成立,则称d1优于d2。这个定义是对给定的损失函数而言的,常应用的是平方损失函数,即

此时

本文将风险函数作为评估估值好坏的标准,用它来评价BEWLS融合方法和WLS融合方法的优劣。
定理1:经过线性化的非线性离散多传感器系统式(6)和式(7),在假设1—3的条件下,用BEWLS法所得到的分布式观测融合Kal man滤波器优于用WLS法所得到的分布式观测融合Kal man滤波器。
定理2:在假设2初值相同的条件下,即

存在

推论1:在假设2初值相同,即式(18)和式(19)成立的条件下

3.2 仿真实验
本节将上节提出的BE WLS分布式融合Kal man滤波算法通过带相关观测噪声和不同观测矩阵的两传感器非线性跟踪系统的例子来进行验证和分析。考虑Kal man滤波系统i个传感器观测值(i,j=1,2),用Tayl or级数线性化后,方程为:

式中,wi(t+1)和vi,j(t+1)是零均值的白噪声随机

式(23)—式(25)中有:

分别利用上面所述的两种观测融合Kal man滤波算法对多传感器系统进行仿真计算,仿真时状态的噪声方差阵的值为C,观测方程的噪声方差阵的值为D,M(j)(0)为E 。
图1和图2为两种融合算法的风险函数值,可以看出BEWLS融合算法的风险函数值在整个仿真时间段中都小于 WLS融合算法的风险函数值,将风险函数作为评估估值好坏的标准,说明BEWLS融合算法优于WLS算法。

图1 两种融合算法的风险函数值的比较(x 1(t+1))Fig.1 Comparison of risk f unction values of t wo f usion algorit h ms(x 1(t+1))
BE WLS融合算法是有偏差的,这种偏差是系统偏差,需要校正。本文依据多传感器提供的测量和跟踪信息,形成测量数据对,当采样周期到时,利用已测量数据纠正系统偏差,补偿和修正数据,实现多传感器的融合跟踪。图3、图4显示用式(12)、式(13)校正BE WLS融合算法的结果,没有校正前,出现了系统性的偏差,用式(12)来在线消除偏差,得到比较好的效果。
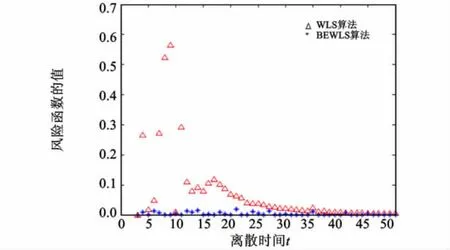
图2 两种融合算法的风险函数值的比较(x 2(t+1))Fig.2 Co mparison of risk f unction values of t wo f usion algorithms(x 2(t+1))

图3 偏差对BEWLS融合算法的影响(x 1(t+1))Fig.3 Bias effect on BEWLS f usion algorith m (x 1(t+1))

图4 偏差对BEWLS融合算法的影响(x 2(t+1))Fig.4 Bias effect on BEWLS f usion algorith m (x 2(t+1))
4 结论
本文提出了基于贝叶斯估计的带不同观测矩阵的加权最小二乘分布式融合Kal man滤波算法。该方法首先采用推广的离散卡尔曼滤波对非线性系统线性化,然后在已知模型参数本身的先验信息条件下,利用Beyes估计对Kal man滤波观测方程进行观测加权最小二乘融合。理论和仿真实验证明BEWLS融合算法优于WLS算法,该算法具有以下特点:1)利用风险函数为评价指标,可以证明带不同观测矩阵的BEWLS分布式融合Kal man滤波算法优于WLS融合Kal man滤波算法,即采用BEWLS融合Kal man滤波算法能够得到更高精度的融合数据;2)带不同观测矩阵的BEWLS融合Kal man滤波算法是有偏估计,但通过纠偏方法可消除融合偏差。
[1]欧连军,丘红专,张洪钺.多个相关测量的融合算法及其最优性[J].信息与控制,2005,34(6):690-695.OU L J,QIU H Z,ZHANG H Y.Multiple correlated measurements f usion algorith m and its opti mality[J].Inf or mation and Control,2005,34(6):690-695.
[2]杨红,罗飞,李艳,等.非线性离散系统的相关观测融合时变 Kal man滤波[J].控制与决策,2010,25(5):669-675.YANG Hong,LUO Fei,LI Yan,etc.Correlated measurement f usion ti me-vary Kal man filtering algorith ms of nonliinear discrete system[J].Control and Decision,2010,25(5):669-675.
[3]邓自立,高媛.按对角阵加权信息融合Kal man滤波器[J].控制理论与应用,2005,22(6):870-874.DENG Zili,GAO Yuan.Infor mation f usionin Kal m n filter weighted by diagonal matrices[J].Control Theory &Applications,2005,22(6):870-874.
[4]梁佐江,邓自立.按三种不同加权准则的信息融合Kalman滤波器的性能比较[J].黑龙江大学自然科学学报,2005,22(6):789-792.LIANG Zuojiang,DENG Zili.Perf or mance co mparision of infor mation f usion Kal man filters weighted by three different ways[J].Journal of Natural Science of Heilongjiang University,2005,22(6):789-792.
[5]冉陈键,惠玉松,顾磊,等.相关观测融合稳态Kal man滤波器及其最优性[J].自动化学报,2008,34(3):233-239.RAN ChenJian,HUI Yusong,GU Lei,et al.Correlated measurement f usion steady-state Kal mam filtering algorith ms and t heir opti mality[J].Acta Ato mation Sinica,2008,34(3):233-239.
[6]王松桂,史建红,尹素菊,等.线性模型引论[M].北京:科学出版社,2004.
[7]赵树杰,赵建勋.信号检测与估计理论[M].北京:清华大学出版社,2004.
[8]张金槐.线性模型参数估计及其改进[M].长沙:国防科技大学出版社,1999.
