基于图象模式的CCD视频信息采集技术
2011-08-09王汉兵周永平陈世纯
王汉兵,黄 涛,雷 磊,周永平,陈世纯
(1.武汉军械士官学校,湖北 武汉 430075;2.总装3303工厂,湖北 武汉 430200)
0 引 言
CCD观测器能够根据辐射源自动、实时地测量飞行器偏离瞄准线的角偏差,以串码形式供给控制箱编制控制指令,它实质上是一个测量角偏差的精密光电系统。CCD观测器的主要性能参数包括测角精度、抗干扰能力和电子学的灵敏度。为有效完成以上参数采集,应用计算机、虚拟仪器、自动化、数据库等技术,设计了一套CCD观测器自动测试系统。
该文侧重对CCD观测器的主要输出信号即视频信号的提取及关键软硬件设计进行阐述,并给出测角精度、抗干扰能力和灵敏度的分析处理方法。
1 CCD观测器功能原理
CCD观测器是以单片机为核心的光机电系统,它的变焦光学系统接收弹尾辐射源能量,并分成主次2路,通过不同的滤光片后投射到各自的CCD摄像机靶面上,分别形成弹标和背景及干扰的全视频信号。经过钳位、放大后相减,再经窗口选通和比较,取出弹标信号,该信号输送给测角电路,根据弹标信号在CCD摄像机靶面上的位置及光学系统的焦距,即可求出角偏差量。高低和俯仰方向的角偏差数字量通过单片机串口以一定传输方式传输到控制箱[1]。CCD观测器的工作原理框图如图1所示。

图1 CCD观测器的工作原理框图

表1 CCD观测器主要技术性能

图2 测试系统总体结构
CCD观测器主要技术性能如表1所示。测角精度包括大视场精度和小视场精度,大视场精度指发射时间为3.8s时(相当于测量400m处),目标的精度指标;小视场精度是指发射时间为20s时(相当于测量3000m处),目标的精度指标。抗干扰能力是指CCD观测器在最恶劣的外场环境下对最强干扰光源的不捕获能力。灵敏度是指CCD观测器的信号提取能力,能对真实目标进行可靠捕获和精确跟踪。
2 测试系统的方案设计
2.1 总体结构
CCD观测器测试系统采用PXI总线模块作为硬件开发平台,系统框图如图2所示,包括UUT部分、适配部分和PXI总线部分。
可以看出,检测观测器需要施加的信号有DC信号、数字I/O信号、开关信号等,用来给照明灯、目标灯供电,模拟发射同步信号和自检信号,控制CCD观测器馈电,提供测试环境、测试条件和激励等。观测器响应的信号主要有DC信号、视频信号、电阻信号、数字信号等,通过A/D采集或者数字万用表测量,主控机获取相关信号的数据。
2.2 测试原理
检测观测器时,需要给观测器提供一个模拟辐射源,这个信号相对于观测器来说是个无穷远的信号,同时还需要模拟实际背景。通过观看观测器的视频输出,可以对观测器做一个定性的或定量的判断。

图3 平行光管
为此,建立一套室内光学模拟系统,包括照明系统、平行光管、调整机构、底座等。该系统通过卤素灯照明,经过聚光镜和四方棱镜,使得平行光管周围4个区域光强均匀分布,同时在平行光管的出口处安装4只光敏三极管,检测光的强弱和分布情况。在平行光管的焦平面上设置测精度分划板、测抗干扰分划板和测灵敏度分划板3种分划板,以及相对应的3种中性滤波片,分别提供检测3个性能参数所需的适当背景、目标和测试条件,还安装磷砷化镓小灯泡来模拟真实目标。调整机构用来做高低和方位2个方向的调整,以便被测CCD观测器对准平行光管,并瞄准相应的分划板。测试系统采用了平行光管作为室内光学模拟系统,为测试系统提供目标、干扰目标和背景。平行光管的外观如图3所示。
3 测试系统适配电路设计
3.1 串口匹配与通信电路设计
观测器的角偏差是观测器测试的最重要部分。角偏差反映了观测器的精度特性,是对观测器定量测试的重要指标。
在进行精度测试时,CCD观测器内部8098单片机以特定波特率按固定的串行通信方式输出在水平和俯仰2个方向上的角偏差(观测器每40ms发一桢角偏差数据,每桢11个字节,波特率为93.75KB),主控计算机RS232串口接收并解算出其数值。
单片机与主控机实现通信,需要满足2个条件:(1)电平匹配;(2)波特率匹配[2]。这里,使用 MAX232芯片进行TTL电平与RS232电平转换。CCD观测器的串口波特率是93.75 KB,是由其内部单片机的晶振频率和分频器数值决定,作为装备这一数值是不能改变的,而主控机的串口波特率也是一些特定的离散值,没有93.75KB的波特率。因此,观测器与主控机的直接通信将变得不可能。
为此,在适配电路中设计了一个由51单片机作为过渡的波特率转换电路。选择合适的晶振和设定适当的分频器值,以93.75 KB波特率接收来自CCD观测器的串码。经过适当裁剪处理,通过信号切换电路,再以2400B波特率发送给主控机串口,实现对有效角偏差数据地实时获取。由于单片机的串口需要分别与武器装备和主控机进行通信,特别是在接收观测器角偏差的时候,单片机首先要在方式二的工作方式下[3],使用93.75 KB的波特率接收观测器角偏差,完成单片机与观测器串行通信,角偏差存入单片机的RAM中;然后将单片机的工作方式设为方式一,波特率设为2 400 B,完成单片机与主控机的串行通行,单片机RAM中的角偏差送入主控机。串口匹配与通信原理框图如图4所示。
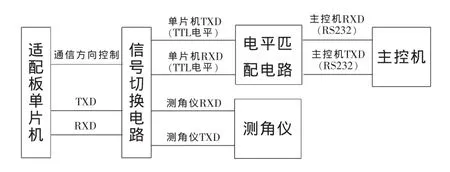
图4 串口匹配与通信原理框图
3.2 平行光管出口光强控制电路设计
在进行CCD观测器精度、抗干扰性和灵敏度测试时,都需要一个合乎要求的背景,即通过闭环控制平行光管出口的光强大小和分布情况来实现。平行光管出口光强的闭环控制如图5所示。出口光强由安装在出口处上下左右的4个光敏三极管来敏感,将光强转换为直流电压信号,经过滤波、放大由A/D采样,送入主控计算机进行逻辑判断,通过虚拟面板上的4个绿色指示灯和4个红色指示灯来显示。当电压小于0.4V时,绿灯不亮表示背景光太弱;当电压在0.4~0.6 V之间时,绿灯点亮表示背景光适合;当电压大于0.6V时,红绿灯都点亮表示背景光太强;如果4个绿灯同时点亮或熄灭,说明出口光强是均匀的。电压值的或大或小,通过适当的函数关系控制D/A模块的模拟电压输出大小,控制照明供电电路输出一定功率的电压提供给照明卤素灯,从而实现对出口光强的闭环控制,满足CCD观测器的测试条件。
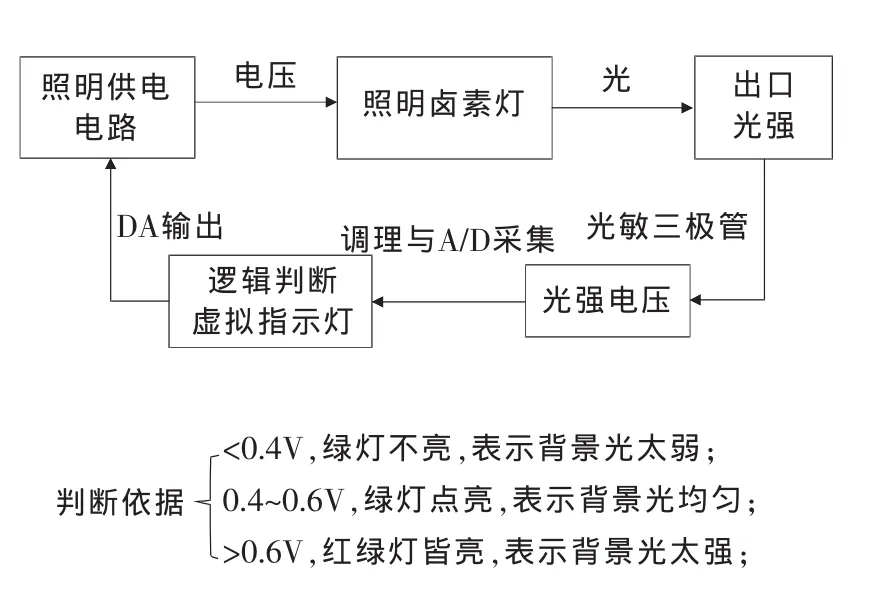
图5 平行光管出口光强闭环控制
3.3 背景电平和目标电平的控制
在进行抗干扰性和灵敏度测试时,对背景电平和目标电平都有着明确的定量要求,以便于CCD观测器性能测试[4]。背景电平和目标电平大小的闭环控制如图6所示。对CCD观测器输出的视频信号进行高速A/D采样,获取其中背景电平和目标电平的大小,依据测试要求进行判断。通过相应的函数关系控制D/A模块的2路模拟电压输出大小,分别控制照明灯和目标灯的供电电压,使其达到合适的亮度,再由CCD观测器拾取输出视频信号,最终经过反复调整,使其背景电平和目标电平满足测试要求[5]。加有目标的视频信号波形如图7所示。
3.4 视频处理电路
为了监视CCD观测器在测试过程中对目标的捕获情况,需要实时显示带有目标的视频图像。由于CCD观测器工作时自动输出2路全视频信号,为此,在A路视频信号中混叠选通窗口信号和目标加亮信号再经过驱动电路,而B路视频信号仅经过驱动。2路视频信号经过单刀双掷继电器的切换,由视频采集模块捕获视频图像并显示出来,便于人们观察比较[6]。

图6 背景电平与目标电平闭环控制

图7 加有目标的视频信号波形
4 软件实现
4.1 测角精度
4.1.1 主控机软件流程
在精度测试时,主控机软件需要完成以下5项任务:
(1)完成进行精度测试的条件设置,包括提示测试人员将大平行光管打到精度测试档和调节大平行光管的背景灯亮度;
(2)打开A路视频监控,将观测器设置为测角精度测试状态;
(3)打开主控机串口,设置波特率;
(4)完成角偏差的接收;
(5)测试12次后,计算测角精度、变焦起止时间。主控机串行通信软件流程图如图8所示。
4.1.2 测角精度的计算
主控机接收到的角偏差,已经经过适配板单片机软件的处理。每一帧数据有5个字节,前2位是Y方向角偏差,第3、4位是X方向角偏差,第5位是变焦齿数。
由于CCD观测器精度指标包括大视场精度和小视场精度,因此在计算精度时,分别取发射时间为3.8 s和20 s时的角偏差数据计算。由于观测器每0.04s发一帧角偏差数据,所以大小视场时刻可以据此确定。经计算,大视场取第95帧数据,小视场取第500帧数据。
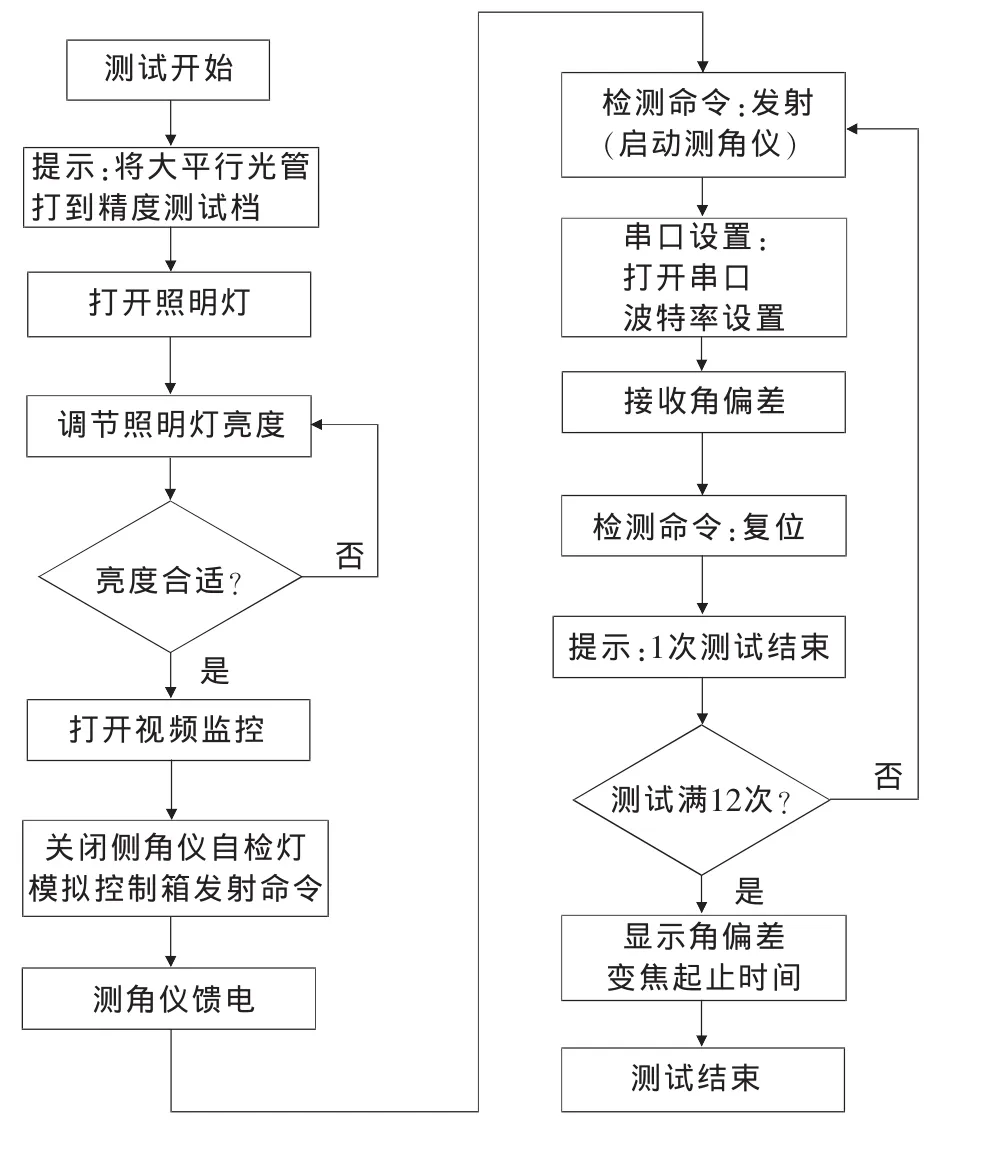
图8 测试软件流程图
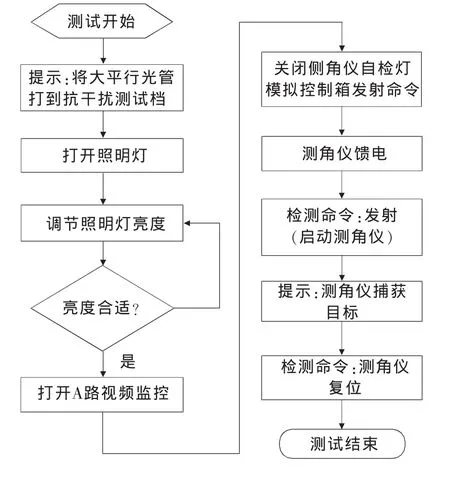
图9 测试软件流程
为了准确地评估CCD观测器的精度,总共进行12次测量,以它们的均方根值作为精度的测量值。CCD观测器的精度均方根计算公式为

式中:σ——均方根;
xi——水平方向角偏差;
yi——俯仰方向角偏差;
n——测量次数[7],此处n=12。
4.1.3 精度测试的视频显示
测试系统集成了视频采集模块,用于显示观测器捕获目标的情况。正常情况下,当变焦时间小于3.8s时,目标应被捕获,并且目标的两侧各有一条加亮线。
4.2 抗干扰性能
抗干扰检测的软件流程图见图9。如果调整观测器使干扰目标在全视场内移动,CCD观测器都不捕获干扰目标,则说明其抗干扰性能合格。
5 结束语
该文介绍了CCD观测器的组成及工作原理,并以此为依据,详细介绍了CCD观测器视频采集系统的整体设计方案及系统的软硬件设计,对观测器输出的重要信号给出了分析处理方法。系统测试界面友好,功能齐全,分析直观,具有良好的开发拓展功能。
[1] 张建虎.AFT07A/B反坦克导弹技术勤务教程[M].北京:国防工业出版社,2003.
[2] 杨乐平,李海涛.虚拟仪器技术概论[M].北京:电子工业出版社,2003.
[3] 蒋鹏,潘孟春,祖先锋,等.一种新型的反坦克导弹制导控制系统性能动态测试方法[J],弹箭与制导学报,2005,25(4):339-341.
[4] 黄涛,潘孟春,祖先锋.基于PXI总线的战术导弹装备自动测试系统设计[J].航空兵器,2005(4):52-56.
[5] 王汉兵,黄涛,张建虎.基于PXI总线的动态测控系统设计[J].战术导弹控制技术,2006(3):80-85.
[6] 王艳武.CCD输出信号处理的研究[J].物流工程与管理,2010(9):143-144.
[7] 白钊,白波,周丽华,等.CCD摄像机照度检测装置的研制[J].应用光学,2010,31(5):772-776.