基于模糊PID算法的轮式机器人驱动轮控制器设计
2011-07-20李声晋李启瑞
李 鑫,卢 刚,李声晋,周 勇,李启瑞
(1.西北工业大学,陕西西安710072;2.中兴通讯股份有限公司,陕西西安710065)
0 引 言
目前,机器人已经广泛应用于工业生产中,在其它领域的应用也逐渐增多。轮式机器人作为移动机器人的一种,具有体积小、成本低、机动性好、生存能力强等优点,应用前景广阔,越来越受到各国研究者的关注[1]。作为轮式机器人的控制重点之一,机器人各驱动轮的调速控制精度要求也越来越高,传统的PID控制方法已经很难满足其要求[2]。因此,为了获得高精度的机器人驱动轮转速控制效果,本文将具有较强鲁棒性能的模糊控制理论与PID控制理论相结合,设计了驱动轮的模糊PID调速控制器。
1 轮式机器人机械结构
本文所设计的轮式机器人采用对称四轮驱动结构,由四个结构尺寸完全相同的独立运动单元和车体构成,并且配备有多电机协调驱动控制系统。车体在机器人中部,用于装载控制系统、电池及其他各种设备,轮式机器人的机械结构如图1所示。机器人具有四个独立的运动单元,每个运动单元由一个摆臂、两个电动轮构成。这两台电动轮分别置于摆臂的两端,一个与地面保持接触作为驱动轮,另一个则作为从动轮。
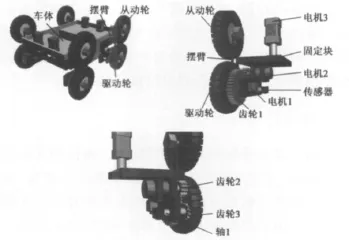
图1 轮式机器人机械结构
摆臂的内置电机为永磁无刷直流电动机,并与减速器构成摆臂传动链带动摆臂旋转,可实现摆臂及从动轮绕着驱动轮中心轴做正反向的全周摆动。驱动轮的内置电机同样采用体积小、质量轻、输出扭矩大的无刷电机,经减速器输出至传动轴,直接驱动车轮转动。为了实现两个旋转运动在驱动轴中心线的传递的要求,驱动电机通过与其配套的减速器将驱动动力传递给驱动轴,实现机器人平台的轮式运动所需动力。
为了实现对轮式机器人运动的精确控制,采取了双闭环控制方式:①利用无刷电机内部的霍尔传感器,在实现电机正确换相的同时对机器人进行速度闭环控制;②在机器人应用的每个电机外部均加装位置传感器,从而可以进行准确的位置闭环控制。
2 模糊控制理论
传统PID控制方法是在闭环控制之前根据机器人期望的速度和角速度,求出闭环控制的左右轮期望速度后再实现两轮闭环控制,但当存在车轮打滑扰动时,引起的左右轮速度的偏差将得不到补偿,使移动机器人期望的角速度与其实际的角速度出现大的偏差,导致控制效果不理想。模糊控制原理图[3]如图2所示。
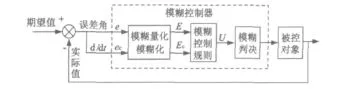
图2 模糊控制原理图
模糊控制器由模糊化、模糊推理、反模糊化三个基本部分构成。输入变量的模糊化就是将输入的变量确切值转化为可用模糊集合描述的模糊变量,即确定输入变量和输出变量,各变量的模糊状态,输入变量的论域、输入变量实际确切值对应的论域确切值,以及定义各模糊状态的隶属函数。模糊推理的任务就是利用前面得到的输入变量的模糊集,根据专家经验与知识,推导模糊关系,然后根据模糊关系求出输出变量。一般情况下模糊控制器的输出变量是一个模糊集,不能直接用来控制被控对象,需要进行反模糊化转化成执行器可以执行的精确量。
3 硬件设计
每个驱动轮的驱动电动机均是二对极的无刷直流电动机,其额定电压为24 V,额定功率为52 W,为增强电动机的输出扭矩,加装有减速比为1∶36的减速器。电动机控制上电后,DSC通过CAN总线接收上位机发送的指令报文,并采用中断方式每隔5 ms回传电动机的运行状态到上位机,上位机根据一定的控制算法产生对功率变换电路进行驱动控制,进而实现对无刷直流电动机转速的调节。为了提高车辆的伺服性能,系统采用PWM双极性驱动方式对电动机实行驱动控制。
整体设计总体框架如图3所示,它显示了硬件电路各部分以及与外设之间的关系。
整个硬件系统主要由电源模块、DSC控制模块、功率驱动模块以及CAN总线通讯模块等构成。24 V的蓄电池向整个系统供电,其中控制模块DSC需5 V供电,驱动模块需要15 V供电,逆变电路需24 V供电,而5 V与15 V电分别是由三端稳压器7805与7815产生。作为控制部分核心的主控芯片dsPIC30F4012,主要完成系统所需要的PID运算,产生一定占空比的脉宽数字信号PWM以控制电机运行,并实现与上位机的实时数据通讯。
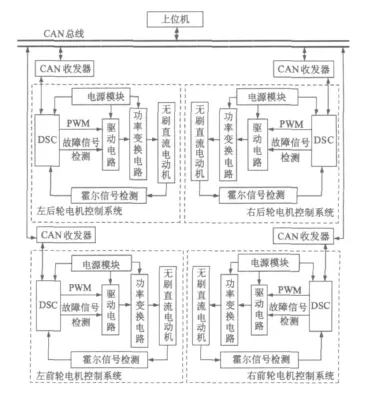
图3 轮式机器人控制系统组成结构图
系统驱动电路主要包括了高压驱动芯片IR2130以及由六个功率MOSFET构成的三相全桥逆变电路。IR2130输出的六路驱动信号分别加到对应的六个栅极MOS管,触发其开通与关断。驱动电路的功能是将电源的功率以一定逻辑关系分配给无刷直流电动机定子的各相绕组,使电机能够实现连续的运转[4]。为了保障系统的有效运行,控制器还包括故障检测电路,可实现系统的过流及欠压等保护。
系统采用CAN总线通讯方式进行数据传输,CAN模块采用Philips公司的PCA82C250芯片,实现物理介质之间的电气转换。系统以PC作为上位机,进行命令的发送与实时监控。上位机接收DSC通过CAN总线发来的信息,并对这些数据信息进行逻辑处理,用以调整电动机的转速,进而协调左右轮的运动。DSC根据从上位机下达的指令来控制电动机的换相,并向驱动电路发送PWM脉冲调制信号。驱动电路再将DSC发送的调制信号进行功率放大,向各个开关管传送能使其饱和导通与关断的驱动信号。DSC不断的采集实时转速,并根据转速来修正上位机给出的控制指令,实现轮式机器人驱动轮的转速闭环控制。
4 控制器模糊PID的设计
本文采用模糊技术与PID结合构成模糊PID的控制方法,其基本原理是在普通PID控制器的基础上,加上一个模糊控制环节,模糊控制环节根据系统的实时状态,在线分别调节PID的三个参数。该模糊PID控制器的目的是找出PID控制的三个参数KP、KI和KD与电机转速偏差E以及转速偏差变化率EC之间的模糊关系,在系统运行过程中通过不断检测E和EC,根据模糊控制原理对这三个参数进行在线修改,以满足不同E和EC对控制参数的要求[5]。模糊PID控制器结构如图3所示。
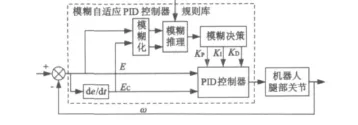
图4 模糊PID控制器结构图
PID控制的理想算法:
总之,现代化专业群建设是高职院校展现自我实力,提高学校就业率,与区域产业有效结合,产业结构升级发展的一个专业集合,它直接体现了高职院校的整体办学理念,人才培养定位,办学特色,也是加大构建一流高职院校的主要内容,高职院校要结合自身实际特点及区域内产业发展需求等多方面因素,科学开展专业群建设,有效提高高职院校人才培养质量和专业教学水平。

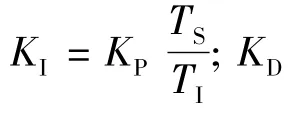
式中:e(t)为设定值与过程值的偏差;KP为比例系数;Ti为积分时间常数;Td为微分时间常数。
采用DSC编写PID控制程序,将微分方程进行差分处理,得到增量式PID控制方程:
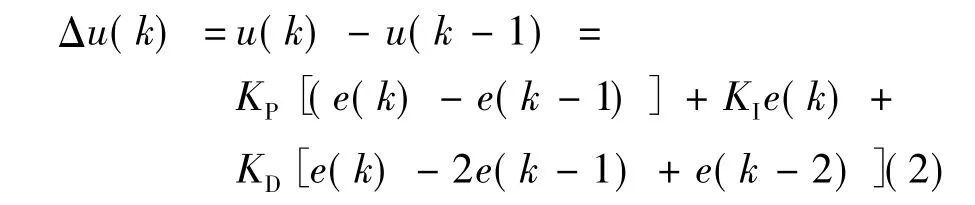
控制算法中无需累加,控制的增量仅与最近k次采样有关,故产生误动作时影响较小,且易通过加权法处理得到较好的控制效果。
结合PID控制过程与实验经验,归纳PID控制三个参数 KP、KI和 KD的模糊化自调节原则[7]如下:
(1)KP调整原则
控制系统控制品质的好坏很大程度上取决于比例值的选取。增大KP可加快系统响应速度,减小稳态误差且可提高控制精度,但KP如果过大将会产生超调,甚至引起系统不稳定;减小KP会增大系统稳定裕度,减小超调量,但却降低了稳态精度,延长了调节时间。调节初期,KP应适当取较大值从而提高响应速度;调节中期,将KP调至适当值以兼顾稳定性以及调节速度;调节后期,将KP调整到较小从而减小静差,以提高系统稳态精度。
积分作用主要用于消除系统的静态误差。增大KI有利于消除系统静态误差,但KI过大又会使超调增大,不利于系统的稳定;减小KI不仅有利于系统稳定,也能减小超调,避免振荡,但却对消除静差不利。故调节初期,应适当减小KI;调节中期,为避免影响稳定性,KI应作适度调整;调节后期,应增大KI,以减小系统静差,从而提高稳态精度。
(3)KD调整原则
对具较大惯性的被控对象,微分作用可以改善其动态性能。增大KD有利于加快系统响应速度,减小超调,增加系统稳定性,但系统抗干扰能力会下降,同时KD过大还会使系统提前减速,延长了调节时间;KD过小,调节过程的减速将会滞后,超调增加,导致系统稳定性变差。因此,调节初期,增大KD不仅可减小甚者避免超调;调节中期,由于调节特性对KD变化较敏感,故应适当减小KD;调节后期,还应减小KD,从而减小被控过程的制动作用。
5 实验结果
结合机器人实际控制过程,电机在平稳运行状态时,设定转速差E范围为(-100 r/min,100 r/min),转速差率EC(-30,30)。隶属函数采用三角形函数,解模糊采用重心法,根据第四节中的参数调整原则总结出KP、KI、KD的模糊自调节规则分别如表1~表3所示。
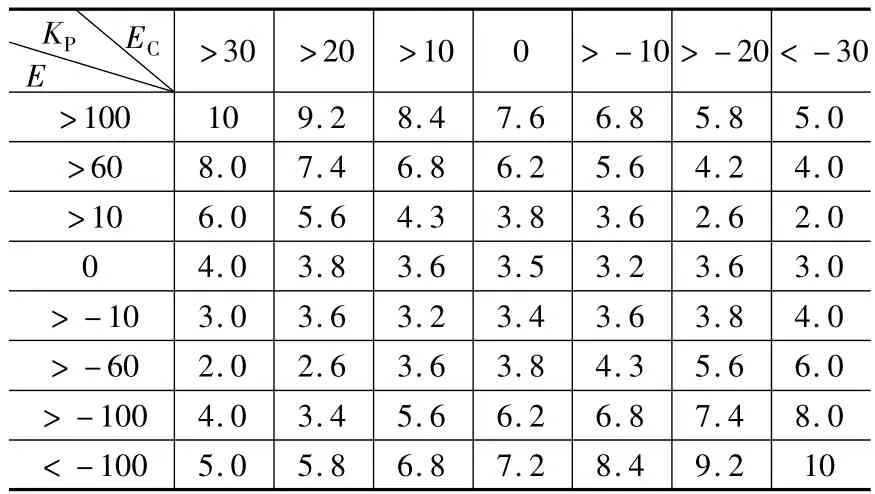
表1 KP模糊自调节规则表

表2 KI模糊自调节规则表
将这三张规则表存入DSC,供程序运行时调用,下面说明实际的控制效果。
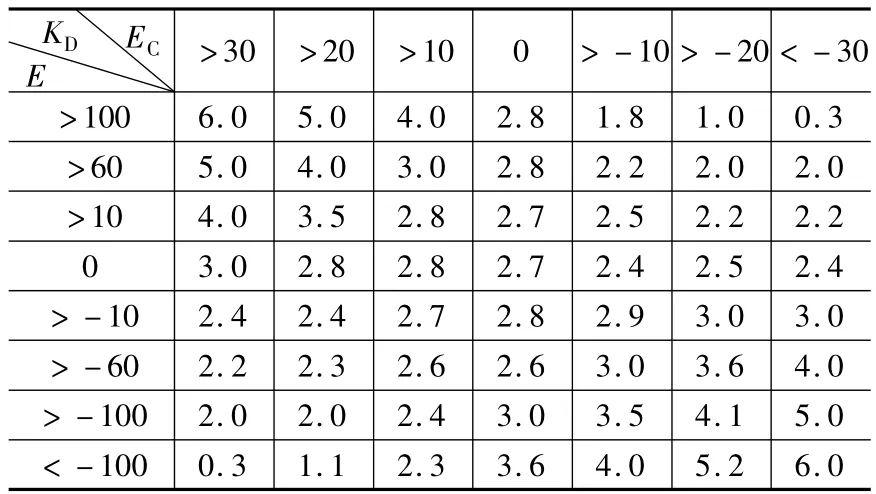
表3 KD模糊自调节规则表
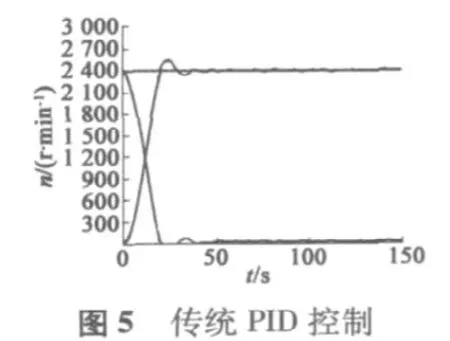
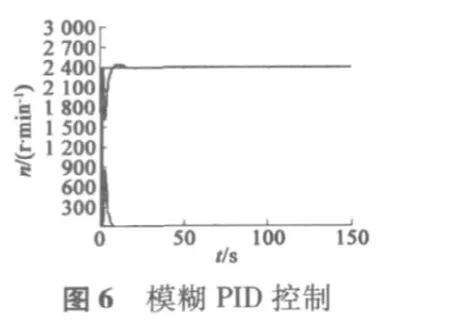
给定电机转速2 400 r/min,传统PID控制和模糊PID控制效果分别如图5、图6所示,从图中可以看出,采用模糊PID控制方法上升时间缩短,超调量减小。
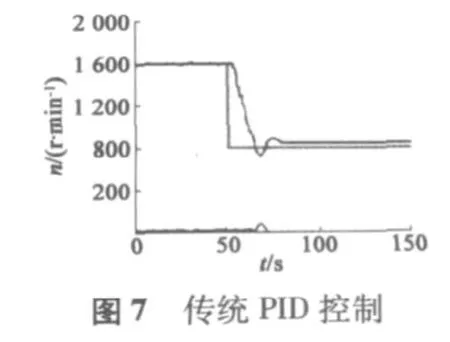
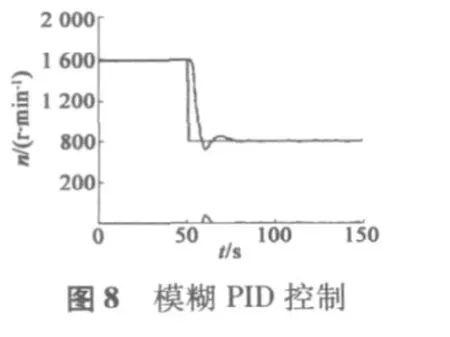
传统PID控制和模糊PID控制在目标转速突变时的控制效果分别如图7、图8所示。从图中可以看出,转速突变时,模糊PID控制的伺服性能更好。
6 结 语
本文以实验室自行研制的轮式移动机器人为平台,主要针对其驱动轮的转速闭环控制设计了模糊PID控制器。通过试验证明,该控制器在电机转速控制的精确性能上优于传统PID控制器;同时该控制器可以有效提高系统的控制精度和伺服性。
[1] 田海波,方宗德,杨坤,等.轮腿式机器人设计及其运动特性分析[J].机械设计,2010,27(6):42 -47.
[2] 高健,黄心汉,彭刚,等.基于FUSS-PID的移动机器人运动控制[J].控制工程,2004,11(6):525 -528.
[3] 章卫国,杨向忠.模糊控制理论与应用[M].西安:西北工业大学出版社,2000.
[4] 陈秀霞,卢刚,李声晋,等.轮式机器人用无刷直流电机控制系统设计[J].测控技术,2010,29(5):55 -59.
[5] 樊燕君.基于DSP的巡飞弹弹载控制系统设计研究[D].南京理工大学,2007.
[6] 李卓.模糊自适应PID控制方法的研究[D].北京:清华大学,1995.
[7] 于秀丽,王大志.模糊自适应整定PID控制系统[M].沈阳工业学院学报,2004,23(2):41-44.