形状记忆合金丝驱动的仿生喷射推进器
2011-07-18王扬威王振龙
王扬威,王振龙,李 健
(哈尔滨工业大学机器人技术与系统国家重点实验室,150001哈尔滨,wywkly@126.com)
形状记忆合金丝驱动的仿生喷射推进器
王扬威,王振龙,李 健
(哈尔滨工业大学机器人技术与系统国家重点实验室,150001哈尔滨,wywkly@126.com)
为了给水下机器人提供一种高速、高效、高机动性、高隐蔽性的推进器,研制了一种采用形状记忆合金丝驱动的模仿乌贼喷射推进原理的仿生喷射推进器.对乌贼的喷射推进机理和乌贼外套膜肌肉结构进行了分析.在适当简化的基础上,模仿乌贼外套膜的肌肉结构设计了记忆合金丝驱动的仿生喷射推进器结构,建立了推进器的几何模型.对推进器样机进行了初步性能实验.实验结果表明:仿生喷射推进器径向收缩均匀,能较好地模仿乌贼外套膜的柔性收缩运动,最大收缩应变8.8%,最高游速58 mm/s.该推进器结构简单,动作柔性好,游动无噪声,为研制仿生机器乌贼奠定了基础.
水下机器人;形状记忆合金丝;乌贼;仿生喷射推进器
传统的水下机器人采用的是螺旋桨推进器,其推进过程中存在传动结构复杂、推进效率低和噪声大等问题.随着计算机技术、仿生学、机电一体化技术、材料科学的发展,模仿水中生物游动模式的仿生水下机器人应运而生,如机器鱼[1-3]、机器龙虾[4]、机器蝌蚪[5]、机器水母[6]、机器乌贼[7]等.在水生动物中有一类动物是采用喷水推进方式游动,通过收缩身体直接将身体腔室内的水喷出,产生矢量推力.喷水推进方式可以实现高速、高效、灵活机动的游动运动,具有较高的仿生价值.科研人员研制出多种喷水推进装置.科罗拉多州立大学的Mohseni等[8]研制了一种涡流推进器(vortex ring thruster,VRT).加州理工学院的Thomas等[9]研制了一种新型的喷水推进器.哈尔滨工程大学的郭书祥等人研制出仿生水母[6].
本文对乌贼喷水推进机理和乌贼外套膜结构进行了分析.采用形状记忆合金丝驱动器,模仿乌贼外套膜肌肉结构设计了仿生喷射推进器.并对其进行了初步的实验研究.设计的仿生喷射推进器结构简单,密度与水接近,能够实现柔性的收缩喷射动作.
1 乌贼喷射推进机理
乌贼(见图1)属于软体动物门头足纲,其游动运动是采用鳍波动运动和喷射推进复合方式实现的.在乌贼身体两侧,对称分布有一对三角形鳍,通过鳍的波动运动能够实现游动和悬浮.依靠喷射推进运动,乌贼可以实现以较高的速度游动.而鳍波动运动主要在乌贼低速游动过程发挥作用.
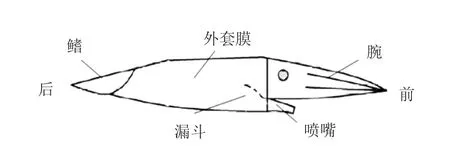
图1 乌贼身体结构示意图
乌贼的喷射推进过程包括充水过程和喷射过程(见图2).在充水过程中,舌瓣闭合,利用外套膜扩张形成的负压将水从开口处吸入,充满外套膜腔;在喷射过程中,舌瓣打开,外套膜收缩将腔内的水从喷嘴喷出.充水过程和喷射过程交替进行,从而利用脉冲喷射的反作用力推进乌贼实现游动.乌贼喷射过程中,喷口会随喷射时间的增加而减小,来获得更高推进动能[10].喷射过程中,乌贼外套膜腔内的压力较高,质量0.35 kg的Loligo vulgaris乌贼,其外套膜腔内压力可达30 kPa[11].
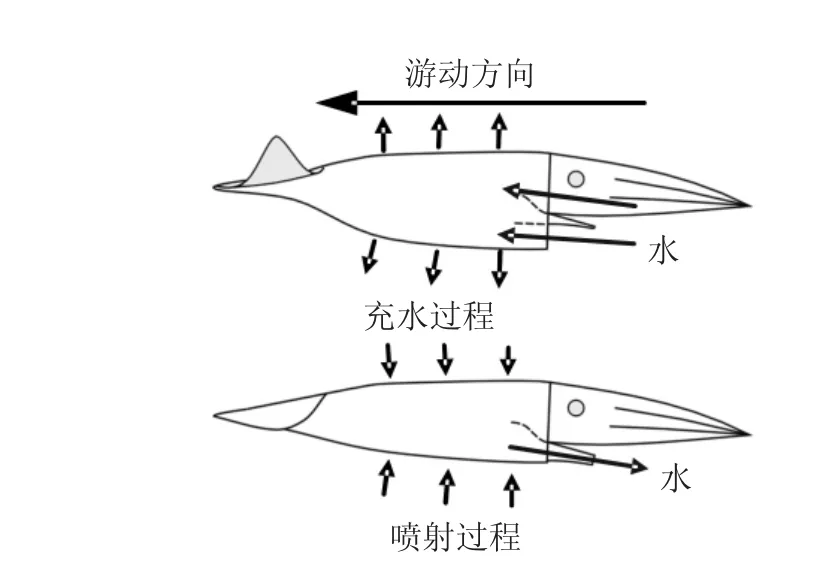
图2 乌贼喷射推进过程[12]
2 乌贼外套膜肌肉结构
在乌贼的身体内没有硬骨骼,整个身体都是依靠三维排列的肌肉纤维和结缔组织支撑,这种肌肉性静水骨骼结构具有不可压缩性,且能够产生较大的形变.
图3为枪乌贼外套膜结构示意图,上下两个剖视图分别为肌肉和肌内结缔组织纤维(Intramuscular connective tissue fiber,IM).乌贼的外套膜肌肉结构包括:内被膜(Inner tunic,IT)、外被膜(Outer tunic,OT)、环状肌纤维(Circular muscle fiber,CM)和放射肌纤维(Radial muscle fiber,RM).

图3 枪乌贼外套膜肌肉结构[13]
在充水过程中,前一次喷射过程中存储在IM-1和IM-2中的弹性能释放,放射肌纤维同时收缩,使外套膜扩张充水,同时在IM-3中存储弹性能;在喷射过程中,首先在IM-3中存储的弹性能被释放,环状肌纤维同时收缩,外套膜腔的体积减小,同时弹性能存储在IM-1和IM-2中.结缔组织在喷射运动过程中对于弹性能的存储和释放有利于减小能量消耗.
3 仿生喷射推进器设计
3.1 设计简化
乌贼的喷射推进运动是外套膜、漏斗和喷嘴协调完成的,其中外套膜的收缩运动是主要运动.乌贼高速运动时,采用环状肌和放射肌交替快速收缩运动,实现高频率的喷射推进.乌贼低速游动时,其喷射运动频率较低,约为1.6~2.2 Hz,外套膜依靠环状肌实现收缩运动,而放射肌在充水过程中不收缩,外套膜仅依靠弹性能实现回复充水.
本文设计的仿生喷射推进器是模仿乌贼低频率喷射时的慢速游动动作.该推进器的简化设计原则为:a)仿生外套膜能模拟乌贼外套膜的收缩和扩张运动,其横截面呈圆环形,收缩运动为主动运动,扩张运动依靠弹性能实现;b)整个仿生外套膜结构为近似肌肉性静水骨骼结构的准柔性结构;c)受仿生外套膜厚度限制,很难模拟放射肌的收缩运动,所以仿生喷射推进器仅模拟环状肌纤维的收缩运动.
3.2 驱动器选择
仿生喷射推进器设计中驱动器的选择非常重要.为了很好地模拟肌肉的收缩运动,需要驱动材料能够提供足够的输出力和功率,且产生足够的变形量.目前广泛使用的能够模仿肌肉特性的材料主要包括:压电陶瓷(PZT)、离子聚合物复合材料(IPMC)、形状记忆合金(SMA),各种材料的主要性能参数如表1所示.

表1 SMA、IPMC、PZT主要性能参数
PZT致动器具有驱动响应快、驱动力大、驱动功率低等优点,但其驱动电压高、位移量小,且制作工艺复杂.IPMC致动器具有体积小、驱动电压低、形变大等优点,但其输出力小.SMA致动器具有体积小、控制方便和结构简单等优点.TiNi基SMA具有较高的电阻率、较大的回复应变和回复应力,且能量密度较高,被广泛应用于各种仿生结构.SMA丝类似于乌贼的环状肌,便于布置和嵌入到仿生结构中,更适合作为仿生喷射推进器的驱动器.
3.3 结构设计
仿生喷射推进器外形与乌贼相似,由仿生外套膜和漏斗组成.仿生喷射推进器的结构如图4所示(图中未画出SMA丝和导线).仿生外套膜的横截面呈圆环形,前部收紧封闭,后部呈敞开状态,通过外套膜的收缩和扩张,能够实现喷射和充水.漏斗由PVC材料制成,安装在外套膜后端开口处,后端为喷口.

图4 仿生喷射推进器结构
仿生外套膜前段呈锥型,后部呈圆柱形.仿生外套膜结构由筋条、SMA丝、柔性机体组成.柔性机体的主体结构为有机硅胶灌注成型,硅胶材料具有柔性好、弹性好、性能稳定、抗撕裂性好等优点,且其密度与水接近.筋条均匀的沿周向分布,嵌入在柔性机体中,起支撑作用,每两根相邻筋条之间通过SMA丝连接,SMA丝布置呈“V”形,用以提高仿生外套膜的径向变形量,利用SMA丝的收缩运动来拉动筋条,从而使整个仿生外套膜收缩.
仿生喷射推进器中仿生外套膜的动作过程为:仿生外套膜收缩时,SMA丝通电加热收缩,拉动相邻的筋条,使得筋条之间的间距缩小,从而使仿生外套膜整体径向收缩,同时在硅胶内存储弹性能.仿生外套膜扩张时,SMA丝断电,依靠存储在硅胶内的弹性能促使仿生外套膜扩张回复.SMA丝与筋条之间的夹角,SMA丝的数量和丝径直接影响仿生外套膜的应变.
3.4 几何模型
仿生外套膜中SMA丝的布置如图5所示.为简化分析仿生外套膜的变形,假设:1)仿生外套膜收缩时纵向长度不变,且变形过程任意时刻厚度不发生变化;2)仿生外套膜在收缩和扩张运动过程中,其内、外壁横截面始终保持圆弧形;3)忽略仿生外套膜运动过程中筋条变形对仿生外套膜变形的影响;4)SMA丝在动作过程中保持均匀收缩.
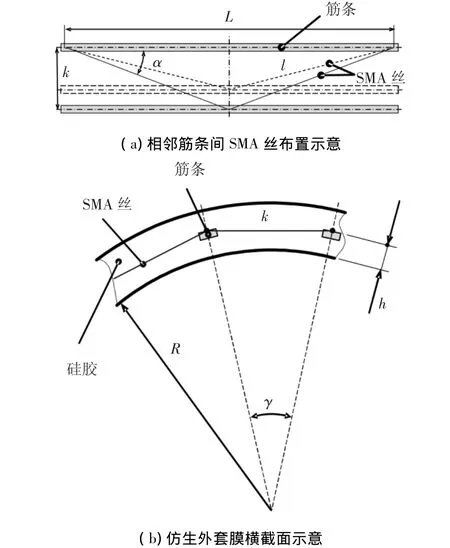
图5 仿生外套膜中SMA丝示意图
基于上述假设,相邻两个筋条的间距可以表示为

式中,k是相邻两个筋条的间距,R是仿生外套膜的内径,h是SMA丝安装点到仿生外套膜内壁的距离,γ是相邻两个筋条对应的圆心角.
相邻两个筋条间SMA丝的长度为

式中,l是SMA丝的长度,L是SMA丝筋条固定端的间距;
相邻两个筋条间SMA丝的应变为

式中,α是SMA丝与筋条的初始夹角,ε是SMA丝的应变.
4 仿生喷射推进器实验
为了验证仿生喷射推进器的推进性能,进行了初步实验研究.仿生喷射推进器样机的仿生外套膜长260 mm,外径 110 mm,内径86 mm,内部均匀嵌入11根筋条,SMA丝筋条固定端间距130 mm,直径0.175 mm,与筋条的初始夹角25°.锥形漏斗由 PVC制成,长100 mm,厚0.2 mm,喷口直径23 mm.漏斗前端插入仿外套膜内侧.仿生喷射推进器的质量805 g,充水量1 250 g.图6为漂浮状态的仿生喷射推进装置.从图中可以看出该推进器的平均密度约等于水.
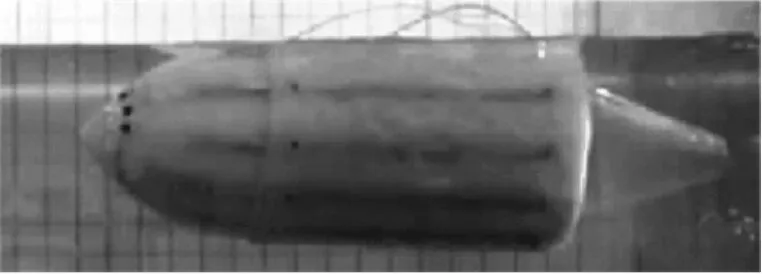
图6 仿生喷射推进器
实验时采用直流电源驱动 SMA丝,电流18 A,通电时间2.5 s.采用摄像机对实验过程进行记录,通过视频处理软件对图像进行处理.实验过程中,推进器的仿生外套膜收缩均匀,推进器游动平稳、没有噪声.仿生喷射推进器的仿生外套膜外径应变和SMA丝的应变曲线如图7所示.推进器的位移和速度曲线如图8所示.

图7 仿生外套膜外径和记忆合金丝收缩曲线
实验结果表明:①仿生喷射推进器径向收缩均匀,仿生外套膜外径最大收缩应变8.8%,能较好地模仿乌贼外套膜的柔性收缩运动,最高游速58 mm/s.②从图7中可以看出:0~2.5 s,SMA丝通电收缩带动仿生外套膜收缩,并达到最大应变;2.5~4.0 s,SMA丝断电,储存在硅胶中的弹性能释放,使得仿生外套膜扩张回复;4~6 s,SMA丝缓慢冷却,SMA丝的应力与硅胶的扩张力基本平衡;6 s以后,SMA丝冷却到相变点以下,仿生外套膜扩张回复到初始状态.SMA丝收缩应变的计算曲线显示,SMA丝应变很小时,就可以使仿生外套膜产生较大应变.③从图8中可以看出:0~0.6 s,速度迅速增加;0.6~2.5 s区间,速度开始缓慢降低;2.5 s以后,速度逐渐减低.

图8 仿生喷射推进器位移和速度曲线
5 结论
1)在对乌贼游动机理和外套膜肌肉结构进行分析的基础上,研制了仿生喷射推进器.该推进器结构简单,无任何传动机构,密度接近于水,具有动作柔性好,游动无噪声等优点,为研制机器乌贼奠定了基础.
2)由于SMA丝驱动的仿生外套膜收缩量小,收缩频率低,使得该推进器游动速度较低,制约了推进器的实用性.
3)下一步拟采用改进SMA丝的布置方式及驱动控制方法,提高硅胶的柔性来提高推进器的游动速度.
4)随着设计的逐步改进和完善,仿生喷射推进器必将为水下机器人的发展提供一种新型、高效的水下推进装置.
[1]TECHET A H,HOVER F S,TRIANTAFYLLOU M S.Separation and turbulence control in biomimetic flows[J].Flow,Turbulence and Combustion, 2003,771(1/2/3/4):105-118.
[2]LIU J,DUKES I,HU H.Novel mechatronics design for a robotic Fish[C]//IEEE/RSJ International Conference on Intelligent Robots and Systems.Edmonton:IEEE,2005:2077-2082.
[3]LOW K H,WILLY A.Biomimetic motion planning of an undulating robotic fish fin[J].Journal of Vibration and Control, 2006,12(12):1337 -1359.
[4]SAFAK K K,ADAMS G G.Modeling and simulation of an artificial muscle and its application to biomimetic robot posture control[J].Robotics and Autonomous System, 2002,41(4):225-243.
[5]KIM B,KIM D H,JUNG J H,et al.A biomimetic undulatory tadpole robot using ionic polymer-metal composite actuators[J].Smart Materials and Structures, 2005,14(6):1579-1585.
[6]GUO Shuxiang,SHI L,YE X,et al.A new jellyfish type of underwater microrobot[C]//IEEE International Conference on Mechatronics and Automation.Harbin:IEEE,2007:509-514.
[7]VISHAL.Squid robot underwater inspector armed with biomimetic propulsion technique[EB/OL].(2010-04-20).http://www.robotster.org/entry/squid-robot-underwater-inspector-has-biomimetic-propulsion-technique.
[8]KRIEG M,MOHSENI K.Thrust characterization of a bioinspired vortex ring thruster for locomotion of underwater robots[J].Journal of Oceanic Engineering, 2008,33(2):123-132.
[9]THOMAS A P,MILANO M,G'SELL M G,et al.Synthetic jet propulsion for small underwater vehicles[C]//Proceedings of the IEEE International Conference on Robotics and Automation.Barcelona:IEEE,2005:181-187.
[10]BARTOL I K,PATTERSON M R,MANN R.Swimming mechanics and behavior of the shallow-water brief squid Lolliguncula brevis[J].Jurnal of Experimental Biology, 2001,204(21):3655-3682.
[11]JOHNSON W,SODEN P D,TRUEMAN E R.A study in jet propulsion:an analysis of the motion of the squid,Loligo vulgaris[J].Journal of Experimental Biology, 1972,56(1):155-165.
[12]王振龙,杭观荣,王扬威,等.乌贼游动机理及其在水下仿生机器人上的应用[J].机械工程学报, 2008,44(6):1-9.
[13]KIER W M,THOMPSON J T.Muscle arrangement,function and specialization in recent coleoids[J].Berliner paläobiologische Abhandlungen,2003(3):141 -162.
A biomimetic water-jetting vehicle actuated by shape memory alloy wires
WANG Yang-wei,WANG Zhen-long,LI Jian
(State Key Laboratory of Robotics and System,Harbin Institute Technology,150001 Harbin,China,wywkly@126.com)
To provide propulsive machine for underwater robot with high speed,high efficiency,high maneuverability and high hidden,a biomimetic water-jetting vehicle that imitated jetting propulsive principle of squids actuated by shaper memory alloy wires is developed.The jetting propulsive mechanism and the muscle structure of squids are analyzed firstly.Then the structure of the biomimetic water-jetting vehicle,imitating the muscle structure of squids,and based on proper simplification is designed.The geometrical model is set up.At last,the propulsive performance of the vehicle is experimented.The experimental results show that the biomimetic water-jetting vehicle can imitate the flexible contract of the mantle of squids;the radial contract is uniform;the maximal contractive strain is 8.8%and the maximal swimming speed is 58 mm/s.In conclusion,the vehicle has simple structure,flexible jetting motion and zero noise,providing basis for further research on biomimetic robot squid.
underwater robot;shaper memory alloy wire;squid;biomimetic water-jetting vehicle
TP242.3
A
0367-6234(2011)09-0033-05
2010-05-11.
国家自然科学基金资助项目(50775049);机器人技术与系统国家重点实验室(哈尔滨工业大学)自主研究课题(SKLRS200805C).
王扬威(1980—),男,博士研究生;
王振龙(1963—),男,教授,博士生导师.
(编辑 杨 波)
