一种新的T-S模型混合辨识算法
2011-07-18卢鸿谦宋清南黄显林高晓智
卢鸿谦,宋清南,黄显林,高晓智 ,2
(1.哈尔滨工业大学控制理论与制导技术研究中心,150001哈尔滨,luhongqian@163.com;2.Aalto大学电气工程系,00076 Espoo)
一种新的T-S模型混合辨识算法
卢鸿谦1,宋清南1,黄显林1,高晓智1,2
(1.哈尔滨工业大学控制理论与制导技术研究中心,150001哈尔滨,luhongqian@163.com;2.Aalto大学电气工程系,00076 Espoo)
提出一种新型混合辨识算法HIA,以解决传统T-S模型辨识方法中所存在的不完全优化问题,如FCM与最小二乘法相结合的辨识方法就存在这样的问题.HIA通过将FCM、和声搜索算法以及最小二乘法相结合,并引入了误差反馈机制,以实现对所有参数的整体优化,并避免陷入局部极小点.论文将HIA应用到陀螺稳定平台的T-S模型辨识中,通过与传统辨识方法比较MSE值可以看出,HIA能够获得更高的辨识精度.这表明,对于实际的非线性系统,HIA能够有效解决传统辨识方法的不完全优化问题.
T-S模型辨识;混合辨识算法;误差反馈机制;陀螺稳定平台
近年来,有关 T-S 模型[1]辨识方法的研究取得了很大的进展,其包括结构辨识与参数辨识2个方面.在结构辨识方法中,基于RC原则法、前向选择法、后向选择法等用于输入变量的选择;而输入空间划分方法则有网格划分法、聚类方法[2]等;在参数辨识方法中,一般先通过网格划分或模糊聚类等方法确定前件参数,而后采用线性优化方法如最小二乘法[3]、梯度下降法等对后件参数进行优化.这些方法只基于一组未优化的前件参数来优化后件参数,回避了非线性优化问题,辨识精度难以提高.而神经网络、遗传算法等各种随机搜索算法的出现,使得前件及后件参数的整体优化得以实现.这些算法的思路主要有2种,一种是直接从整体的参数空间出发,对前件参数及后件参数进行整体优化,这种方法的效率不高,精度也无法得到保证;另外一种则是先采用传统的辨识方法确定前件及后件参数,然后利用随机搜索算法对模型规则数进行增减.而本文所设计混合辨识算法HIA则将和声搜索(HS)算法[4]、模糊聚类(FCM)算法[5]与最小二乘法有机结合,对参数进行整体优化,并利用传统辨识方法的优势,避免非线性优化问题,使辨识精度以及辨识效率同时得到保证.文献[6]从理论上对该算法进行了阐述及仿真,本文在此基础上,通过陀螺稳定平台的T-S模型辨识,来验证HIA在解决传统辨识算法缺陷上的有效性.
1 T-S模型辨识原理
T-S模型是一种描述复杂非线性过程的数学模型,其模糊规则库由N条规则组成,其中第j条规则如下:
如果uk1∈Aj1,且uk2∈Aj2,…,ukm∈Ajm,那么,

其中,Aji(i= 1, 2,…,m)为模糊集;uki(i= 1, 2,…,m)为m维输入;ykj为第j条规则对应于第k个输入的输出.在此基础上,应用“取小”或“乘积”以及“加权平均”操作解模糊化,可计算得到输出值.
以MISO系统为例,考虑如式(2)所示指标函数[7]:

其中,Nnum为训练数据对个数;Ytrain为训练数据输出向量;Yout为辨识输出向量,其第k个分量yok由(3)描述:

式中m为输入维数,采用取小操作解模糊化及高斯型隶属函数划分输入空间.隶属函数如式(4)所示:

其中:j= 1, 2,…,N;i= 1, 2,…,Nnum;cji为第j个聚类中心的第i维分量;σji为第j个聚类的聚类方差的第i维分量.
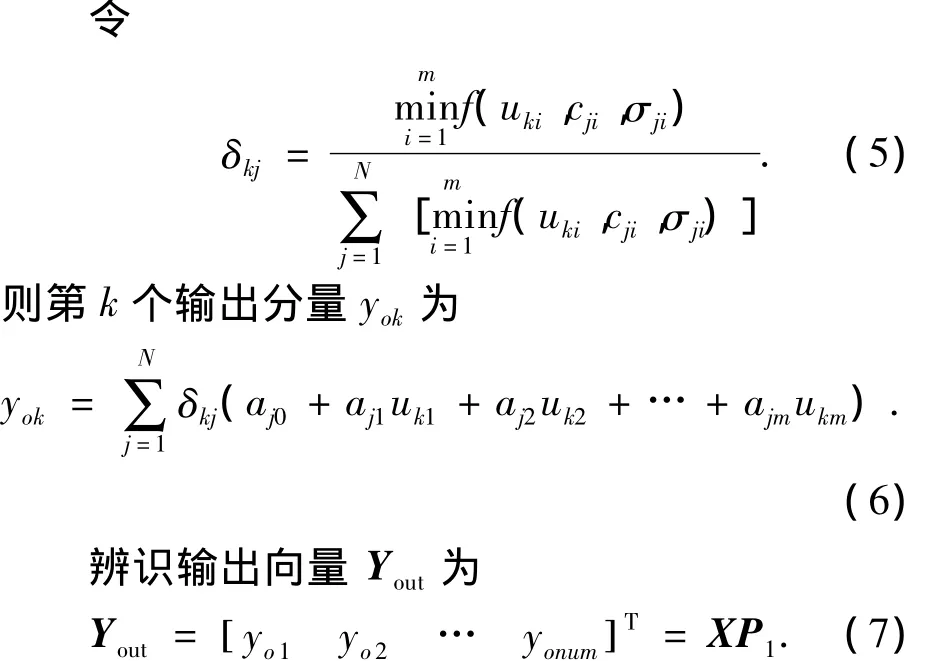
其中,矩阵X与参数向量P1的表达式如下:

构造参数向量Pc和Pσ,如下所示:

从式(7)可得,当Pc和Pσ未知时,对式(2)的优化是1个高维非线性函数优化问题.在传统辨识方法中,一般先确定Pc和Pσ,并通过线性估计方法求得最优后件参数向量P1,这种做法的目的是为了避免高维非线性函数优化的问题,但它一般只能得到降维空间意义下的部分参数最优值.HIA的目标在于既能实现总体参数向量P的优化,同时又避免高维非线性函数优化的问题.
2 HIA辨识算法原理
2.1 HIA总体设计思想
HIA旨在解决传统辨识算法中所存在的缺陷——不完全优化问题.从式(1)~(11)可知,TS模型辨识辨识最终可归结为如下式所示的目标函数:

这是1个高维非线性优化问题.如果通过随机搜索方法实现参数向量Pc及Pσ向着指定参数空间内的最优点前进,则对参数向量P1的优化就可通过最小二乘法实现,这样就避免了高维非线性优化问题,使问题得以简化,这即是将HS算法引入到T-S模型辨识过程的目的.也是HIA的理论基础之所在.
具体而言,HIA将和声搜索(HS)算法、模糊C均值聚类(FCM)法以及最小二乘法有机结合,三种子算法的功能如下:利用FCM算法实现模型前件参数空间的初始划分,HS算法实现对前件参数空间即Pc及Pσ的寻优,而最小二乘法则在HS搜索算法的基础上对后件参数空间进行优化.通过这样的子算法组合,使得混合辨识算法达到既避免高维搜索问题,又能实现模型参数辨识全局优化的目的.由于T-S模型辨识的目标函数具有其独特的性质,使得HIA方法能够取得良好的辨识效果.下面分别介绍HIA中各子算法的原理.
2.2 HIA各子算法概述
和声搜索算法模拟和声创作过程寻找函数全局最优点.其寻优过程如下:
1)随机生成HMS个解向量,并计算其适应度值,构建和声解库Harmony Memory;
2)生成新的解向量,以概率HMCR对和声解库中的解向量进行随机组合;以概率PARGN对其分量以幅度BW调整;以概率1-HMCR随机生成1个解向量;
3)计算其适应度值,更新和声解库,并返回步骤2),直至达到最大的搜索次数IN.
算法中有几个重要参数需通过反复尝试来确定.如 HMS、HMCR、PARGN、IN 及 BW 等,围绕这些参数的调节机制,有许多经改善后和声搜索算法.本文HIA中,PARGN和BW采用如下式所示的变化规律[8]:

其中n为当前搜索次数.如此调节的目的是使搜索算法在搜索初期以较大概率及较大的范围进行调整,减小算法陷入局部极小点的概率.HIA中和声搜索空间的初始参考点由FCM算法给出.
采用FCM对前件空间进行划分的好处是可根据实际输入量的空间分布来进行前件空间的初始划分,且可以避免规则爆炸问题.当广义输入变量维数不高,且其空间分布范围已知时,可以用网格划分方法来代替FCM的,只是此时后件的规则数要增加一些.FCM算法将数据点按式(12)所示目标函数归类[9].
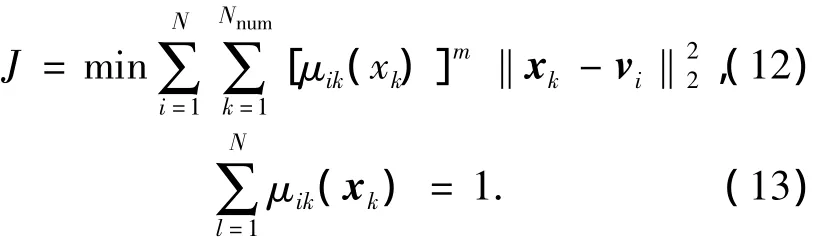
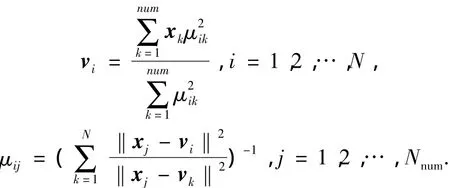
其中,m≥ 1,一般取m=2.当对Nnum个数据点进行N个划分时,点xk以μik隶属于第i个聚类中心vi,μik满足如式(13)所示的约束条件.通过拉格朗日乘子法求解带约束的函数优化问题,J值可通过迭代方法求得.迭代公式如下所示[10].
FCM聚类获得初始前件参数后,初始后件参数以及该组解向量对应的适应度值可通过最小二乘法来获得.递推最小二乘法为
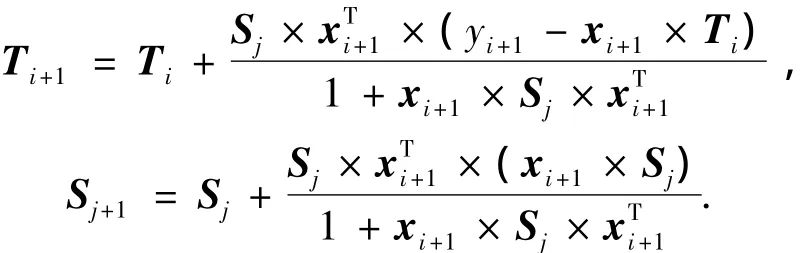
其中,Ti(i= 0, 1,…,Nnum-1)为式(9)所示的后件参数向量;Si为增益矩阵;xi+1为X的第i+1行;yi+1为训练数据输出Ytrain的第i+1个分量.递推初始参数 T0= 0,S0=1010I,IN×(m+1),N×(m+1)为单位阵.
2.3 HIA流程图
HIA将前件参数与后件参数综合优化,同时又利用传统辨识方法的优点,在随机搜索方法的基础上引入最小二乘算法加以约束,不仅避免了高维搜索,搜索精度也有了可靠保证.其中,HS算法的引入是HIA之所以能实现高效的高维参数优化的关键.其模拟音乐家创作和声的过程引导着参数向量Pc及Pσ向着指定参数空间内的最优点前进,从而给参数向量P1的优化创造了条件.HIA流程图如图1所示.
3 陀螺稳定平台建模
待建模系统是光纤陀螺稳定平台.目标是利用采集到的实际陀螺稳定平台输入输出数据,辨识得T-S模型.
本文欲建立系统的外环框架转动角速度与输入电压之间的关系.待辨识系统处于开环状态,输入端为计算机,输出端为外环框架上固连的光纤陀螺.框架上带有相应的光电编码器,可以测出外环框架转过的角度,但由于该光电编码器的精度较低,通过其所测量角度信号进行差分得到框架转动角速度的方法是不可取的,因为这种方法会造成噪声的放大.而外环上所固连的光纤陀螺是可以直接测量到外环的转动角速度的,所以本文在建立该系统的T-S模型时,将光纤陀螺做为1个测量角速度的传感器来使用.
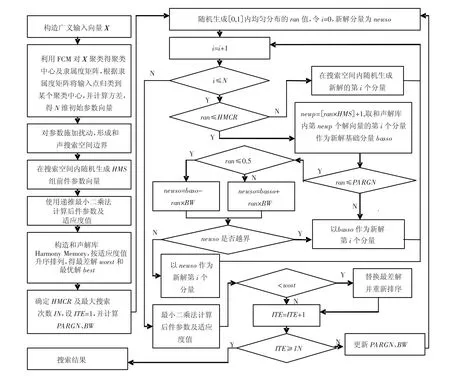
图1 HIA算法流程
实际待辨识对象为1个陀螺稳定平台,以其外环作为辨识对象,光纤陀螺输出外环的转动角速度.该系统内的非线性因素很多,如力矩电机的死区、饱和及迟滞特性;传动齿轮之间的间隙,陀螺内部的各种非线性特性以及由于外环质量沿对称轴分布不均所导致的惯量不平衡等干扰因素,使得对该系统进行合理准确的描述变成1个不容易实现的任务.对于这样的非线性系统,如果采用1个线性系统如惯性环节或者阶次更高的环节对其进行描述,所得到的辨识精度一般是无法满足要求的.本文采用混合辨识算法HIA建立该陀螺稳定平台的T-S模型,以实现对该系统更加准确合理的描述,并取得了很高的辨识精度.
陀螺稳定平台处于半实物仿真平台中,可通过MATLAB采集到带噪声的光纤陀螺转速输出数据.建模激励信号采用高斯白噪声,该信号由Simulink中的 Signal Builder生成,其频率为10 Hz,方差为 1,均值为 0.信号采样时间为15 ms,共采集4 000组I/O数据,历时60 s.
利用光纤陀螺输出转速向量V及激励信号向量U构造广义输入向量

输出向量为V(k),如此选择输入向量的意义为,k时刻的框架转速输出与k-1时刻的激励信号、转速输出及k-2时刻的转速输出有关,而与k时刻的激励信号无关.由于框架存在惯性,k时刻的激励信号只能影响下一时刻的转速输出.基于这样的考虑,可构造3 998组广义输入输出数据对,其中3 000组用于模型辨识,其余998组用于验证模型泛化性.HS初始参数设置如表1所示.其中,IN为搜索次数;DIS表示在允许边界内对前件参数施加±30%的扰动,扰动施加以后,聚类中心c不超过区域Ω;聚类方差σ在Ω的10% ~75%区域内;最大的搜索幅度BWmax不超过初始设定边界的40%;最小搜索幅度BWmin不小于0.001.这些初始参数是多次实验取得的经验值.扰动及聚类方差范围的限定,是为减小规则不完备现象出现的概率.而搜索幅度的限定则是为了减小由于搜索幅度过大使参数超出限定边界的概率,以及由于搜索幅度过小而陷入局部极小点的概率.陀螺稳定平台实验数据表如表2所示(取5位有效数字).表中数据为均方误差(MSE)值,其含义如式(2)所示.其中的传统辨识算法由FCM及最小二乘法构成.

表1 和声搜索初始参数

表2 陀螺稳定平台实验数据
表2实验数据显示,针对实际的陀螺稳定平台,相比于传统的辨识算法,HIA在提高辨识精度上具有明显的效果.验证了HIA对于实际系统具有提高辨识精度的能力.图2~5分别给出了6个聚类数下的第1次实验中,由HIA所得到的辨识曲线及辨识误差曲线、泛化性验证曲线及验证误差曲线.图2中实线表示采样输出,点划线表示辨识输出;图4中实线表示采样输出,点划线表示已辨识T-S模型的预测输出.

图2 辨识曲线
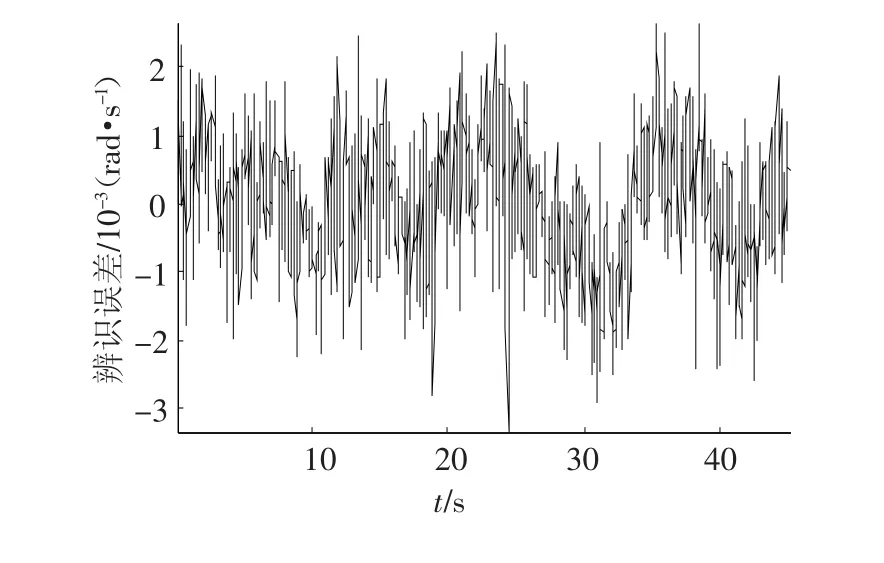
图3 辨识误差曲线

图4 泛化性验证曲线

图5 验证误差曲线
4 结论
从陀螺稳定平台T-S模型辨识的结果来看,对于实际的非线性系统,HIA能够显著提高T-S模型辨识精度.这也充分反映了传统的将前件和后件参数分开辨识的方法是存在本质缺陷的,而HIA则很好的弥补了这种缺陷.HIA将随机优化算法与确定性优化算法相结合,实现了对全局最优点的全维搜索,同时又避免了高维搜索问题,使参数的收敛速度加快,且使辨识精度得到了很大的提高.当然,由于HIA对广义输入向量的分布是有要求的,且其辨识过程需要一定的时间,所以HIA可重点应用于离线辨识或者慢时变系统模型辨识中,且其要求所选广义输入向量具有相对较为均匀的分布.另外,算法中的初始参数设置对最终的寻优结果有着很大的影响,如何合理的确定算法中的初始参数,使辨识模型的精确性、解释性、完备性及泛化性都得到更好的保证,也将是本文下一步所要研究的内容之一.
[1]TAKAGI T,SUGENO M.Fuzzy identification of systems and its application to modeling and control[J].IEEE Transaction on Systems,Man and Cybernetics, 1985,15(1):116-132.
[2]SUGENO M,YASUKAWA T.A fuzzy-logic-based approach to qualitative modeling[J].IEEE Transaction on Fuzzy Systems, 1993,1(1):7 -31.
[3]赵志刚,吕恬生,王庚.基于 Takagi-Sugeno模糊模型的小型无人直升机系统辨识[J].上海交通大学学报, 2008,42(4):856-860.
[4]KANG S L,ZONG W G.A new structural optimization method based on the harmony search algorithm [J].Computers & Structures, 2004,82(9/10):781 -798.
[5]LÁZARO J,ARIAS J,MARTÍN J L,et al.Implementation of a modified Fuzzy C-Means clustering algorithm for real-time applications[J].Microprocessors and Microsystems, 2005,29(8/9):375 -380.
[6]黄显林,宋清南,班晓军,等.一种基于和声搜索算法的T-S模型辨识方法[C]//第二十九届中国控制会议论文集.北京:中国自动化学会控制理论专业委员会,2010:1224-1229.
[7]PARK M,JI S W,KIM E.A new approach to the identification of a fuzzy model[J].Fuzzy Sets and Systems, 1999,104:169-181.
[8]TAHERINEJAD N.Highly reliable harmony search algorithm[C]//European Conference on Circuit Theory and Design.Antalya:ECCTD,2009:818-822.
[9]HUNG Mingchuan,YANG Donlin.An efficient fuzzy C-means clustering algorithm[C]//IEEE International Conference on Data Mining.Piscataway:IEEE,2001:225-232.
[10]CHEN Musong,WANG Shinnwen.Fuzzy clustering analysis for optimizing fuzzy membership functions[J].Fuzzy Sets and Systems, 1999,103:239 -254.
A novel hybrid T-S model identification algorithm
LU Hong-qian1,SONG Qing-nan1,HUANG Xian-lin1,GAO Xiao-zhi1,2
(1.Center for Control Theory and Guidance Technology,Harbin Institute of Technology,150001 Harbin,China,luhongqian@163.com;2.Dept.of Electrical Engineering,Aalto University,00076 Espoo,Finland)
To overcome the drawback of regular T-S model identification techniques,such as the FCM and least-squares method,a new Hybrid Identification Algorithm(HIA)is proposed in this paper.The HIA can simultaneously optimize all the model parameters and avoid being trapped into the local minima by merging the FCM,Harmony Search(HS)and the least-squares method together and using the error feedback mechanism.Our HIA is employed in the T-S modeling of the Gyro-stabilized platform.By comparing the MSE peformance,the HIA can indeed yield a superior MSE performance over the conventional identification methods.The identification results show that the HIA can effectively overcome the incomplete optimization problem of the conventional identification methods.
T-S model identification;hybrid identification algorithm;error feedback mechanism;Gyro-stabilized platform
TP18
A
0367-6234(2011)09-0001-06
2010-04-22.
国家自然科学基金资助项目(60874084),芬兰科学院基金资助项目(135225).
卢鸿谦(1975—),男,讲师;
黄显林(1955—),男,教授,博士生导师;
高晓智(1972—),男,教授,博士生导师.
(编辑 张 宏)
