滑模观测器在卫星姿控系统故障诊断中的应用
2011-07-18吴丽娜张迎春赵石磊陈雪芹
吴丽娜,张迎春,赵石磊,陈雪芹
(哈尔滨工业大学 卫星技术研究所,150001哈尔滨,wln-hit@163.com)
滑模观测器在卫星姿控系统故障诊断中的应用
吴丽娜,张迎春,赵石磊,陈雪芹
(哈尔滨工业大学 卫星技术研究所,150001哈尔滨,wln-hit@163.com)
为提高卫星系统的可靠性,研究了基于观测器的卫星姿态控制系统执行机构故障诊断问题.考虑卫星姿态控制系统的不确定性及外界干扰,设计一种鲁棒自适应滑模观测器,采用Lyapunov函数作为稳定观测器的判别条件,保证了观测器的存在,利用设计的观测器对执行机构的故障进行重构从而达到故障诊断的目的.建立卫星闭环姿态控制系统模型并对算法进行数学仿真,仿真结果验证了方法的有效性.
自适应;滑模观测器;鲁棒性;故障诊断;卫星姿态控制
卫星系统结构复杂、由为数众多的器件和部件组成,并且需要长时间的工作在恶劣的空间环境中,受到多种环境因素的影响,难免在飞行过程中出现这样那样的问题,因此,故障诊断技术在卫星系统的发射和运行中是非常重要的[1].故障诊断理论从上个世纪70年代产生到现在已经得到了迅速的发展,其中,以基于数学模型的故障诊断方法发展的最为深入[2-5].这种故障诊断方法需要建立被诊断对象的精确数学模型,而实际中,真实系统与数学模型总是存在不匹配的问题,此外,系统受到的外界干扰也影响了故障诊断的准确性,因此,鲁棒性问题成为这种故障诊断方法的主要研究方向之一[2- 3,6-7].
由于滑模技术对系统的不确定性及外界干扰具有很好的鲁棒性并且可以与自适应、模糊等技术相结合,基于滑模技术的鲁棒故障诊断得到广泛的关注[8-12].最著名的是 Edwards 等人[9-11]提出的基于等效输出注入概念的故障重构方法,当故障发生时,观测器能够保持滑模运动,这种观测器的设计目的是重构故障而不是产生残差信号.利用滑模技术进行故障诊断的另一种思想是设计一种滑模观测器,当故障发生时,观测器的滑模运动停止,从而达到故障检测的目的.Yang和Saif[12]提出了一种基于自适应滑模观测器的鲁棒故障诊断方法,当故障发生时,滑动模态被破坏,能够检测出故障的发生.
基于滑模观测器故障诊断在航天领域的应用也受到了关注.文献[13]以Edwards等人提出的理论为研究基础,设计滑模观测器,并将其应用到卫星姿态控制系统执行机构故障重构中.以Ed-wards等人提出的滑模观测器,要求系统方程的状态向量的维数大于输出向量的维数,文献[13]在建立系统状态空间表达式时也受到了这个条件的约束.本文结合Edwards等人和Yang等人的设计优点,设计一种鲁棒自适应滑模观测器,利用自适应律补偿系统模型不确定性和外界干扰对系统故障诊断的影响,利用滑模部分重构执行机构的故障,最后进行了算法的仿真研究,这种观测器避免了上述约束条件,同时在不确定性和外界干扰存在的情况下,能够直接重构故障便于故障的分析.
1 卫星姿态描述与系统模型
为了研究卫星姿态控制系统的故障诊断问题,首先需要对卫星姿态控制系统进行建模.这里,考虑三轴稳定卫星姿态控制系统,采用3个正装的反作用飞轮作为执行机构,陀螺和星敏感器作为敏感器.卫星的姿态动力学方程如下所示[14]:
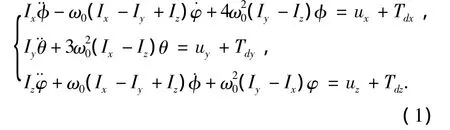
其中:φ、θ、φ分别为卫星的滚动角、俯仰角和偏航角;Ii(i=x,y,z)分别为卫星3个主惯量轴的转动惯量;ω0为轨道角速度;ui(i=x,y,z)分别为三轴的控制力矩;Tdi(i=x,y,z)分别为三轴的干扰力矩.


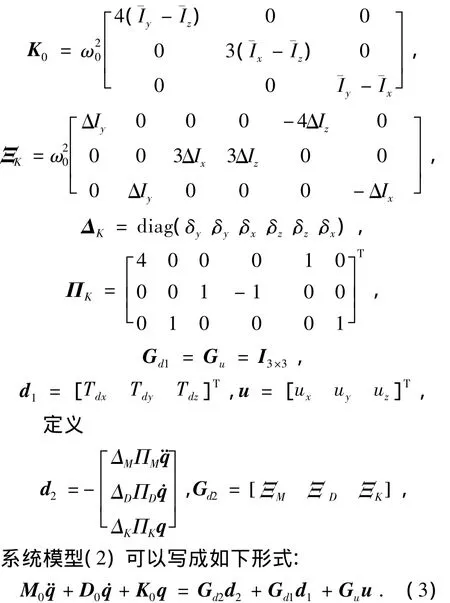


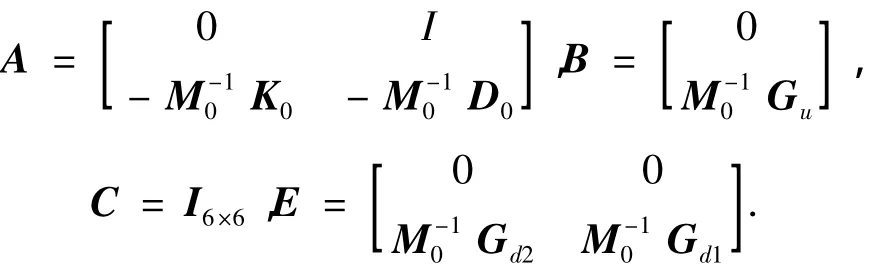
其中:q,˙q分别为卫星的角度和角速度;系统测量输出变量取卫星的角度和角速度;即 y(t)=x(t),系统矩阵A、控制输入矩阵B、测量输出矩阵C和干扰矩阵E的表达式如下所示:
注1 式(4)给出了卫星姿态控制系统考虑转动惯量不确定性和外界干扰时的数学表达式.由式(4)可知,卫星的转动惯量不确定性和外界干扰在数学表达式上可以合为1个整体作为系统的不确定性部分考虑;此外,由于建模时选取的输出变量y=x,因此不满足Edwards等设计滑模观测器的约束条件[9-11].针对系统(4)的特点,设计一种鲁棒观测器,并将这种观测器用于执行机构故障重构中.
2 自适应滑模观测器的设计
考虑如下动态系统:

其中:x∈ℝn是系统状态向量;u∈ℝm是控制输入向量;y∈ℝp是测量输出向量;d∈ℝq代表了系统的不确定参数,且可以在线估计;A、B、C和E是具有适当维数的常矩阵.
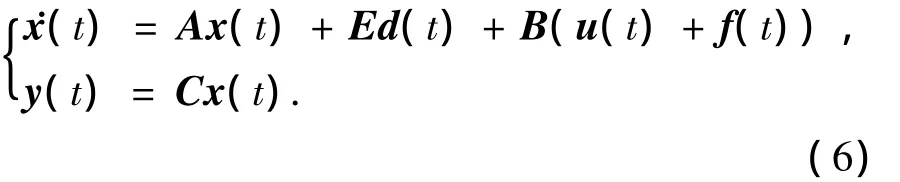
执行机构发生故障时,定义故障向量f(t)∈ℝm,建立如下所示的系统故障模型:
假设1 (A,C)可观,即存在适当维数的正定矩阵P和Q以及矩阵L满足如下等式:

假设2 矩阵B和C满秩,即rank(B)=m,rank(C)=p.
假设3 故障f范数有界,即‖f‖≤ρ(t).
基于以上假设,对系统(6)设计如下所示的自适应滑模观测器:
假设4 存在矩阵F、E0和正定矩阵P0满足如下等式:

对于所设计的自适应滑模观测器(8)有如下结论:
定理1 在假设1~4成立的条件下,定义非线性输入控制量
则系统(8)是系统(6)的渐近稳定观测器.
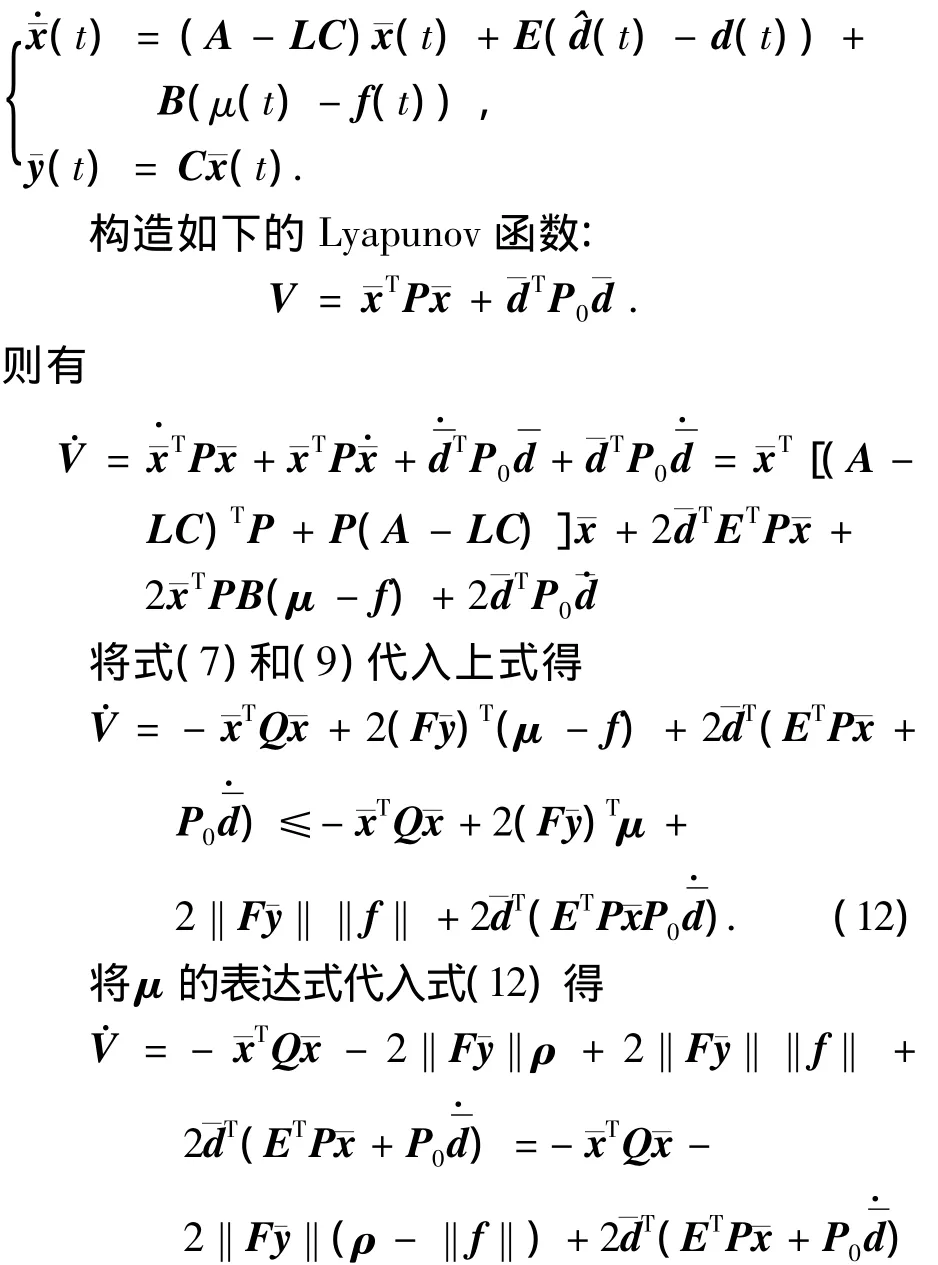
证明 由系统(6)和系统(8)得到系统估计误差方程如下所示:
注2 从假设4中由ET0C=P-10ETP可以得到rank(E)≤rank(C),同样地,由PB=CTFT也可以得出rank(B)≤rank(C).
注3 虽然设计的观测器针对的是系统故障模型,即考虑系统故障时观测器的设计问题,但是从证明观测器存在的过程中可以看出,即使没有发生故障,所设计的观测器仍能保证稳定,即无故障情况下观测器仍然有效.
3 基于自适应滑模观测器故障诊断
根据上一节所设计的观测器建立滑模运动,可利用非线性控制输入量μ来重构执行机构的故障,下面将给出执行机构故障时的故障重构过程.
根据系统(6)设计观测器(8)后,可得系统估计误差方程为

由定理1可知,即使执行机构发生了故障,随着时间的增加,系统状态估计误差¯和不确定参数估计误差¯d趋向于零.假设也趋向于零[9],由系统(13)可得

因为B满秩,因此由(14)得出

由此可见,执行机构故障信号能够通过非线性控制输入量μ(t)来计算.这里将不连续的控制输入量μ(t)用一种连续的方式来代替[9],如下所示:

其中δ是一个很小的正数,通过选择足够小的δ,μδ能够以任意精度近似μ.结合式(15)和(16)可以得出

从上式可以看出,等式右边的信号仅仅依赖于输出估计误差¯y(t),因此可以在线计算,从而可以用于执行机构故障的估计.
4 仿真结果
为了验证所提方法的有效性,本文在MATLAB的Simulink环境下建立卫星姿态控制系统的仿真模型.初始条件为:卫星3个主惯量轴的转动惯量分别为 Ix=12.49 kg·m2,Iy=13.85 kg·m2,Iz=15.75 kg·m2;反作用飞轮的最大角动量为3 N·ms,转动惯量为6.37 ×10-4kg·m2,最大输出力矩为0.1 N·m;环境干扰力矩采用模型
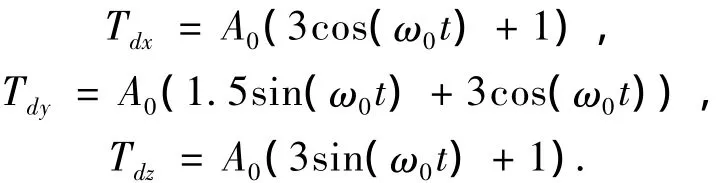
其中A0为干扰力矩幅值,取A0=1.5×10-5N·m;卫星轨道角速度ω0=0.001 rad/s,采用PID控制器,控 制 器 的 参数 分别 为 KP=5I3×3,KI=0.001I3×3,KD=15I3×3.

按照第3节的论述过程,将上述设计的观测器用于执行机构的故障重构仿真研究,仿真中选取 ΔIx= - 10% ·x,ΔIy=10% ·y,ΔIz= -10%·z,由于不确定性的影响卫星实际的转动惯量为Ix=13.49 kg·m2,Iy=14.85 kg·m2,Iz=16.75 kg·m2,利用式(17)对执行机构的故障进行重构.滑模观测器具有良好的鲁棒性,仿真中除考虑了系统的不确定性和外界干扰外,也可将系统噪声考虑其中,此时只需调整ρ的取值即可,而不会改变最终结论[9].仿真结果如图1~4所示.

图1 x轴执行机构受到的实际故障
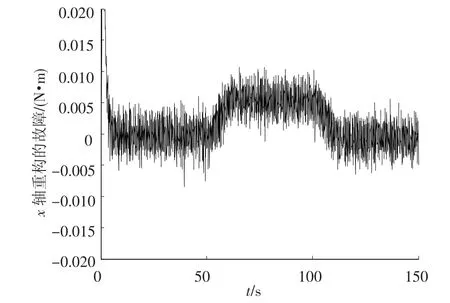
图2 x轴的执行机构故障重构

图3 y轴的执行机构故障重构
图1给出了x轴执行机构实际受到的故障,故障发生的时刻为tf=50 s,故障发生的时间为60 s.图2、图3和图4分别给出了x、y和z轴利用本文设计的观测器重构的信号对x轴执行机构故障的响应.从图2~4中可以看出,只有x轴重构的信号再现了x轴执行机构实际受到的故障,而其他2个轴重构的信号并不受x轴执行机构故障的影响,从而证实了本文设计的自适应滑模观测器用于卫星姿态控制系统执行机构故障诊断的有效性.
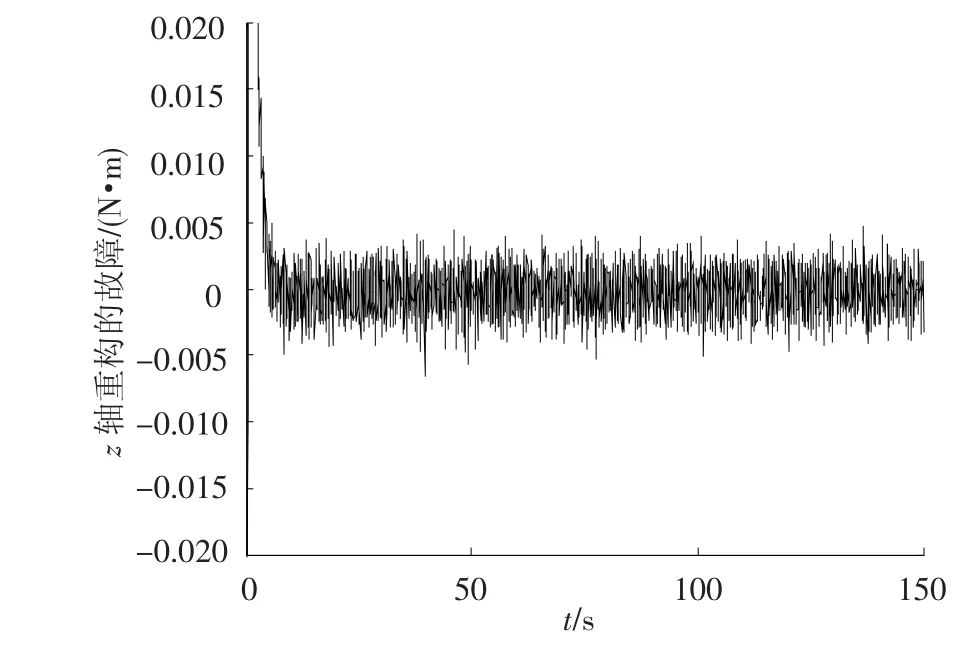
图4 z轴的执行机构故障重构
5 结论
本文针对卫星姿态控制系统执行机构故障诊断问题设计了一种自适应滑模观测器,在设计过程中考虑了卫星自身不确定性和外界干扰等因素的影响,并将这种观测器用于执行机构的故障重构.仿真结果表明,该方法能够在不确定性和干扰存在的情况下准确地重构卫星某个轴执行机构的故障,而其他轴的重构信号不受该轴故障的影响.此外,虽然所设计的观测器是针对卫星姿态控制系统的,但是仍适用于能够表示成式(5)形式的动态系统,具有一定的普遍意义.本文只针对卫星姿态控制系统执行机构缓变故障的故障估计问题进行了讨论,对于突变故障情形下的故障估计以及关于敏感器的故障诊断问题还有待进一步的研究.
[1]龙兵,宋立辉,荆武兴,等.航天器故障诊断技术回顾与展望[J].导弹与航天运载技术, 2003,(3):31-37.
[2]GERTLER J J.Survey of model-based failure detection and isolation in complex plants[J].IEEE Control Systems Magazine, 1988,8(6):3 -11.
[3] GERTLER J.Analytical redundancy methods in fault detection and isolation[C]//Proceedings of the IFAC/IMACS Symposium SAFE-PROCESS.Baden-Baden:[s.n.],1991:9 -21.
[4]ISERMANN R,BALLE P.Trends in the application of model-based fault detections and diagnosis of technical processes[J].Control Eng Practice, 1997,5(5):709-719.
[5]ISERMANN R.Model-based fault-detection and diagnosis-status and applications[J].Annual Reviews in Control, 2005,29(1):71 -85.
[6]PATTON R J.Robustness in model-based fault diagnosis:the 1995 situation[J].Annual Reviews in Control, 1997,21:103-123.
[7]FRANK P M,DING X.Survey of robust residual generation and evaluation methods in observer-based fault detection systems[J].Journal of Process Control, 1997,7(6):403-424.
[8]SPURGEON S K.Sliding mode observers:a survey[J].International Journal of Systems Science, 2008,39(8):751-764.
[9]EDWARDS C,SPURGEON S K,PATTON R J.Sliding mode observers for fault detection and isolation[J].Automatica, 2000,36(4):541-553.
[10]TAN C P,EDWARDS C.Sliding mode observers for detection and reconstruction sensor faults[J].Automatica, 2002,38(10):1815-1821.
[11]TAN C P,EDWARDS C.Sliding mode observers for robust detection and reconstruction of actuator and sensor faults[J].Int J Robust Nonlinear Control, 2003,13(5):443-463.
[12]YANG H,SAIF M.Fault detection in a class of nonlinear systems via adaptive sliding observer[C]//Proceedings of the IEEE International Conference on Systems,Man and Cybernetics.Piscataway:IEEE, 1995,3:2199-2204.
[13]栾家辉.故障重构技术在卫星姿控系统故障诊断中的应用研究[D].哈尔滨:哈尔滨工业大学,2006.
[14]YANG C D,SUN Y P.Mixed H2/H∞state-feedback design for microsatellite attitude control[J].Control Eng Practice, 2002,10(9):951-970.
Sliding mode observer used in satellite attitude control system fault diagnosis
WU Li-na,ZHANG Ying-chun,ZHAO Shi-lei,CHEN Xue-qin
(Research Center of Satellite Technology,Harbin Institute of Technology,150001 Harbin,China,wln-hit@163.com)
To improve the reliability of satellite system,the observer-based actuator fault diagnosis problem for satellite attitude control system was investigated.Considering the uncertainty and disturbance of the satellite attitude control system,a robust adaptive sliding mode observer was proposed.A Lyapunov function was given as the judgment condition to stabilize the observer.Then,the proposed observer was used for actuator fault reconstruction.At last,the simulation of the observer in a satellite attitude control system with actuator fault illustrates the effectiveness of the proposed approach.
adaptive;sliding mode observer;robustness;fault diagnosis;satellite attitude control system
TP273
A
0367-6234(2011)09-0014-05
2010-05-17.
中国博士后科学基金资助项目(20090450126).
吴丽娜(1981—),女,博士研究生;
张迎春(1961—),男,教授,博士生导师.
(编辑 张 宏)
