卫星导航设备收发链路时延测量方法研究①
2011-07-18张金涛易卿武王振岭魏海涛
张金涛,易卿武,王振岭,魏海涛
(1.中国电子科技集团公司第五十四研究所,河北 石家庄050081;2.河北省卫星导航技术与装备工程技术研究中心,河北 石家庄050081)
0 引 言
卫星导航系统由空间段导航卫星、地面段运行控制系统和用户段三大部分组成[1]。系统时间同步需要将导航卫星和地面站同步到系统时间基准上。一般来说,卫星导航系统的时间基准是由位于地面的系统控制中心产生和维持的[2]。因此,卫星导航系统时间同步需要使用星地和站间相结合的时间同步技术。
通常,在导航系统中采用无线电双向伪距时间同步法来实现星地时间同步和站间时间同步[2]。无线电双向时间同步设备的时延测量误差是系统时间同步的主要误差。为保证时间同步精度,需要对卫星导航系统中时间同步设备的发射链路和接收链路设备时延进行测量和标定。
1 时延定义
当信号通过某一传输系统或某一网络时,其输出信号相对于输入信号总会产生滞后时间,这就是时延[3]。而几乎所有的信号传输系统(真空除外)都是有色散的,它随信号频率变化而变化。时延与信号频率的关系称为系统的时延特性。
设备时延是指信号在发射设备或接收设备内部传播所需的时间延迟,该时间延迟是设备自身的固有特性,并且其大小与设计有关。对于不同的设备或系统,根据个体的设计特殊性,其设备时延有着不同的确切定义。在卫星导航系统中,通常根据设备的性质可以分为发射设备时延和接收设备时延。
1.1 发射设备时延
发射设备时延起点为发射基准时刻前沿,发射设备时延终点在发射天线的相位中心处,发射设备时延组成由图1所示。

图1 发射设备时延示意图
其中,发射设备时延共包括以下5个引入时延的主要环节:时频处理延迟(τTF):时频信号的同步及链路处理时延;基带处理延迟(τTB):含时标的数字信号调制和输出的处理时延;信道处理延迟(τTC):中频信号到射频信号的变频放大处理时延;内部传输延迟(τTS):信号在设备内部经由电缆等环节的传输时延;天线时延(τTA):信号自机箱输出到天线发射相位中心的传输时延。
因此,发射设备时延可以表示为

1.2 接收设备时延
接收设备时延起点为接收天线的相位中心,终点为接收观测基准时刻前沿。接收设备时延组成由图2所示。与发射设备时延近似,接收设备时延也包括以下5部分引入时延的主要环节:
接收时频处理延迟(τRF):时频信号的同步及链路处理时延;接收基带处理延迟(τRB):含时标的数字信号跟踪处理时延;接收信道处理延迟(τRC):射频信号到中频信号的放大变频处理时延;接收内部传输延迟(τRS):信号在设备内部经由电缆等环节的传输时延;接收天线时延(τRA):信号自天线相位中心到射频接口的传输时延。
因此,接收设备时延可表示为


图2 接收设备时延示意图
2 设备时延测量方法
发射设备时延直接体现在信号相位特征上,可以直接测量,而接收设备时延无法直接测量。接收设备时延是通过测量发射与接收设备的组合时延来得到。
基于RFSR精密设备时延测量方法的原理[4],研制了时延测量设备。通过“测量仪表和数字信号处理技术”相结合实现时延测量设备单向零值的精确标定,这样时延测量设备就成为一个时延特性已知的基准设备,时延测量设备采用恒温机箱设计,保持时延特性稳定,通过组合时延测量,可以实现其他设备单项零值及时延差的精确测定。
时延测量设备进行自身单向时延标定,然后,与被测设备构成环路进行测试,使用时间间隔计数器测量时延测量设备1PPS基准点(计数器输入口)、被测设备1PPS基准点间的时差,结合时延测量设备与被测设备环路测试值可以计算得被测设备的单向时延。
如图3所示,时延测量设备完成自身单向时延标定后,与被测设备构成环路进行测试。通过时间间隔计数器测量时延测量设备1PPS基准点(计数器输入口)、被测设备1PPS基准点间的时差。通过接口单元进行信号电平匹配,方便时延测量设备和被测导航设备的信号接收。结合时延测量设备与被测设备环路测试值可以计算得被测设备的单向时延。
被测导航发射设备发射导航信号,经过接口单元调节电平,时延测量接收设备接收,获得组合时延观测量τTR.时延测量接收设备时延值为τR,接口单元以及附加射频电缆的时延可以通过矢网或时延测量设备进行精确标定,时延值为τd,时间间隔计数器测得1PPS基准差为τ1PPS,则被测设备的发射时延值τT为

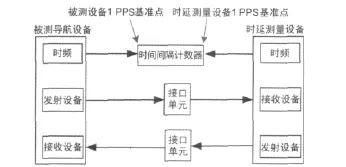
图3 导航设备时延测量连接图
时延测量发射设备发射导航信号,经过接口单元调节电平,被测导航设备接收,获得组合时延观测量τTR.时延测量发射设备时延值为τT,接口单元以及附加射频电缆的时延值为τd,时间间隔计数器测得1PPS基准差为τ1PPS,则被测设备的接收时延值τR为

3 导航设备时延测量实验
3.1 导航设备时延测量有效性实验
某导航设备A与某导航设备B是双向时间同步设备。使用时延测量设备测量导航设备A的发射时延和接收时延分别为1 425.21ns、138.32ns.使用时延测量设备测量导航设备B的发射时延和接收时延分别为1 558.21ns、282.33ns.
导航设备A与导航设备B可以互发互收,进行组合时延测试。如图4所示,导航设备A发射信号1,导航设备B接收;而导航设备B发射信号2,导航设备A接收。对于信号1来说,导航设备A与B直接测得组合时延是1 707.35ns;对于信号2来说,导航设备A与B直接测得组合时延是1 696.69ns.
通过时延测量设备测得的组合时延,对于信号1来说,组合时延(信号1)=导航设备A的发射时延+导航设备B的接收时延=1 425.21+282.33=1 707.54ns;对于信号2来说,组合时延(信号2)=导航设备B的发射时延+导航设备A的接收时延=1 558.21+138.32=1 696.53ns.

图4 导航设备A与B时延测量连接图
结合导航设备A与导航设备B组合时延测试结果,可以进行时延测量设备测试的正确性验证。验证结果如表1所示,导航设备A与导航设备B直接测试组合时延与测量获得的组合时延对于信号1来说组合时延差为1 707.54-1 707.35=0.19ns,对于信号2来说组合时延差为1 696.53-1 696.69=-0.16ns,其差的绝对值均小于0.2 ns.此实验,验证了使用时延测量设备进行导航设备时延测量的有效性。

表1 导航设备A与B组合时延
3.2 导航设备时延测量准确性实验
在被测导航设备的发射设备射频信号链路中串入高精度可编程延迟线,如图5所示,通过改变可编程延迟线的延迟量模拟被测导航设备的发射时延变化,并与时延测量设备测量得到的结果进行比对,分析测量结果是否正确。
验证结果如表2所示,时延测量设备测得被测导航设备时延变化量与可变延迟线变化量相差较小,其绝对值均小于0.15ns.此实验,验证了使用时延测量设备可以较准确的测出导航设备时延的变化。
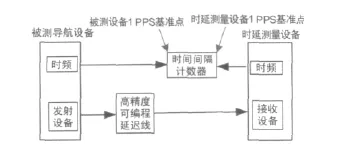
图5 导航设备时延测量连接图

表2 可编程延迟线时延测量表
4 结 论
综上所述,使用时延测量设备可以进行卫星导航设备收发链路的时延测量。通过实践以及实验验证表明了该方法是可行的且有效。
[1]ELLIOTT D K,Christopher J H.Understanding GPS principles and applications[M].2nded.BOSTON LONDON ARTECH HOUSE,2006.
[2]谭述森.卫星导航定位工程 [M].2版.北京,国防工业出版社,2010.
[3]李德儒.群时延测量技术[M].北京:电子工业出版社,1990.
[4]魏海涛,蔚保国,李 刚,等.卫星导航设备时延精密标定方法与测试技术研究[J].中国科学:物理学·力学·天文学,2010,40(5):623-627.
