采用监督特征学习的红外小目标检测
2011-06-07许庆晗金立左费树岷
许庆晗 金立左 费树岷
(东南大学自动化学院,南京210096)
小目标的检测与跟踪近年来成为国内外研究热点.单帧图像中的目标检测直接影响后续跟踪算法的准确性和难度.目前,弱小目标检测的方法主要可分为频域滤波方法[1]、形态学滤波[2]和背景建模法[3-4].频域法针对目标区域的空域和频域特征,采用匹配滤波器[5]进行检测;形态学滤波采用头帽法[2]等分析目标轮廓结构.背景建模法根据背景变化缓慢,而目标附近灰度变化剧烈的特点,在每一像素的邻域对中心像素的灰度进行预测,当像素灰度与预测背景之差大于门限时,判断为目标,这类算法主要有线性预测[4]、Gabor滤波器、双边滤波器(bilateral filter)[6]等方法.此外,基于分形维数[7]和高阶矩特征[8]的方法也取得了一定效果.上述方法处理复杂背景时,难以有效估计背景和调整滤波门限,且由于需要对每像素点邻域进行加权平均运算,计算复杂度高.
本文未沿用滤波或背景估计的思路,而是把检测问题看作“目标-非目标”的分类问题.针对小目标局部图像特点,提出了一种监督特征学习方法.首先在训练样本上通过统计目标与非目标的分布情况,得到一种灰度特征,然后参考文献[9-10]的思想,在特征空间设计一种“多级处理、先粗后细”的级联分类器,用逻辑斯蒂回归(logistic regression)[11]与相关向量机(relevance vector machine,RVM)[12]级联,有效滤除非目标,实现快速检测.
1 小目标特征学习
不同研究领域对小目标有不同定义.根据红外成像的一般概念,对目标的形状进行识别需要6条线以上[13],6×6以下的目标可以认为基本没有几何特征.因此本文主要研究尺寸在6×6以下,但在局部区域具有一定分布的小目标.图1给出以小目标为中心的图像块与一些随机选取的非目标区域的对比.图1(a)为6个小目标,图1(b)为随机选取的6个非目标区域.第1行为原始图像,第2行为用图像上灰度极值进行线性拉伸后的结果,第3行为预处理后结果.
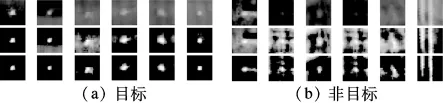
图1 小目标邻域与非目标区域对比
由图1可见,红外小目标的亮度虽然会随距离等因素产生明显变化,但在邻域内,目标仍表现为局部极值.由上文可知,目标区域应小于6×6像素,因此本文考虑小目标为面积小于等于5×5像素的局部灰度极大值区域.采用文献[14]中方法,定义局部极值的5×5邻域为目标区A1,极值的25×25邻域去除A1的剩余部分记为A2,整个25×25区域记为A1∪A2.
观察图1中第2行经过线性拉伸后的图像,可见目标与非目标的区别主要体现在A2区域:非目标的A2含有更多与A1灰度相当的像素,且分布更加混杂.常用的特征描述子如SIFT,LBP等不适于描述这种特性,因此本文针对小目标特点,提出一种局部分布特征.
1.1 预处理
为了描述上述差异,需要增强图像对比度.首先计算A2区域的平均灰度,用原始图像(x,y)处像素的灰度Gin(x,y)减去,灰度小于0的位置设为0,即

再用G'(x,y)中的灰度极大值G'max和极小值G'min将图像线性变换至0~255得到Gout.图1第3行给出了用式(1)预处理后的效果.
1.2 有监督特征学习
本文定义一种灰度分布特征,用于描述上述A2灰度分布特点.在归一化图像Gout中,设置一个灰度门限TL∈[0,255],计算A2中灰度低于TL的像素数在 A2总像素数 NA2中所占比例,记为PL(TL):

统计得到目标与非目标在PL(TL)上的分布后,可用一个门限Tcls对目标与非目标进行分类:

式中,Tcls∈[0,1].
图2(a)、(b)给出TL=10,50时的分布和门限Tcls.可以看出,当TL不同时目标与非目标分布情况也随之改变,且混叠程度不同.因此期望找到最佳的T*L,使PL(T*L)对目标与非目标具有最佳的区分能力.由于需要在训练样本上对目标与非目标分别统计概率密度,因此这是一种有监督学习.

图2 PL(TL)的分类能力比较
对给定的 PL(TL),在[0,1]上滑动 Tcls,利用式(3)得到分类结果,统计检测率PD和虚警率PFA,即得到ROC(receiver operating characteristic)曲线.以ROC曲线下面积AUC(area under curve)为性能指标,AUC越大,说明此TL对应的PL(TL)特征分类能力越强.由图2(c)可见,TL=50比TL=10具有更强的分类能力.在[0,255]灰度层级上遍历TL,比较所有的ROC曲线面积,即得到分类能力最强的灰度门限T*L.定义PLow≜PL(T*L)为图像的低门限灰度分布特征.
类似地,可以计算A2中灰度大于门限TH的像素点数在A2中所占比例PH(TH):

进而找到分类能力最强的 T*H,定义PHigh≜PH(T*H)为图像的高门限灰度分布特征.本文中PLow≜PL(50),PHigh≜PH(120).
再增加A2的平均灰度¯GA2=mean(Gout)作为第 3 个特征,得到由(PLow,PHigh,¯GA2)构成的特征空间.因为 PLow,PHigh∈[0,1],因此对 ¯GA2除以一个常数C 进行归一化,使 ¯GA2/C∈[0,1].为表述简便,归一化后的¯GA2仍用¯GA2表示.图3给出了3个特征的分布,可见这3个特征对目标均具有一定的区分能力.

图3 正负样本在3个特征下的分布
2 分类器设计
考虑到实时性要求,在(PLow,PHigh,¯GA2)特征空间对样本进行分类时,本文采用两级分类器级联的方式.第1级分类器采用计算简便的逻辑斯蒂回归算法构造线性分类器[11].该算法针对分类问题,用对分数(logit)函数对样本的类标记y∈{0,1}进行拟合.因输出 ^y∈[0,1]是置信度而非类标记,因此可设定一个门限pLR,用下式得到类标记yest:改变pLR可控制分类结果的检测率和虚警率.

为了进一步去除虚警,在逻辑斯蒂回归之后级联一个相关向量机分类器[12].RVM 具有和SVM类似的分类精度,但模型更加稀疏,因此分类速度快.考虑到在本文应用环境下,多数负样本已被滤除,需要让RVM精细区分剩余负样本与真目标,因此采用图像全部信息,对预处理后的图像向量化作为样本,而不继续使用上节得到的3特征空间.此时训练样本数为N,样本维数为D=25×25=625.采用PCA进行降维,选取特征值最大的前100个主成分,最终在N×100数据集上训练RVM分类器.
3 检测流程
检测过程如图4所示.原始图像上真实目标被框出,如图4(a)所示.首先将全局图像均匀划分为25×25个网格,在每一网格内搜索局部灰度极大值,移动网格,使极大值位置为中心(见图4(b));经过这一操作可以滤除图像上绝大多数位置,将余下的极值位置作为候选目标进行预处理(见图4(c));提取特征,用逻辑斯蒂回归法进行分类(见图4(d));经过逻辑斯蒂回归可滤除大多数非目标,但仍有一些虚警点(见图4(e));用主成分分析与相关向量机对剩余目标进行分类,最终,除真实目标外只剩余1个虚警点(见图4(f)).
4 实验结果与分析
实验环境为CPU 2.4 GHz双核PC,算法用C++编写.实验数据为对地和对空真实红外视频序列,帧速率为25 frame/s,共4 506 frame,分辨率为640×480,信噪比其中μt为5×5目标区均值,μb为全局背景均值,σb为全局标准差.以视频序列中前1/2的图像作为训练样本,后1/2作为测试样本.

图4 基于级联分类器的检测示意图
表1中给出实验结果.对本文算法给出了只用前2级分类器(极值搜索与逻辑斯蒂回归)和全部3级分类器(极值搜索、逻辑斯蒂回归、PCA+RVM)的结果,表中分别以LR和LR+RVM表示,并给出在逻辑斯蒂回归算法中采用不同pLR门限时的检测结果.为了和传统基于局部背景预测的算法对比,本文与IMEF算法[4]进行了比较.该算法的处理流程和计算量具有代表性,对图像上每个像素的邻域背景进行鲁棒线性估计,以亮度显著变化的位置为检测结果.

表1 检测性能比较
通常以检测率PD和虚警率PFA评价检测算法性能.但计算虚警率时,本文算法与基于背景建模的算法对虚警总数的统计方法不同.背景抑制法逐像素进行计算,因此将图像除目标外的全部像素视作负样本;而本文只将除目标外的局部极大值作为负样本,因此难以直接比较虚警率.因此,本文提出用“每帧平均虚警数”和“每帧最大虚警数”2个指标代替虚警率指标.
从表1可看出,对逻辑斯蒂回归算法,门限pLR从0.21 降至 0.05,可将 PD提高 2.6%,但每帧平均虚警数增加得更多,增加了6.3倍,每帧最大虚警数增加5.1倍;而增加PCA+RVM 分类器后,检测率PD从98.6%降至97.6%,而帧平均虚警数从每帧43.8个降低至0.23个,帧最大虚警数从87个降为4个,虚警率得到明显改善.
图5中给出了在2帧图像上的检测结果.图5(a)为原始图像,真实目标位置被框出;图5(b)为本文算法结果,目标位置的置信度较高,虚警数较少;图5(c)给出了IMEF算法结果,在每像素计算真实灰度与估计背景的灰度差,可见虚警较多,且在第2帧中没有检测到真实目标.由于IMEF算法是逐像素计算,因此图5(c)中每像素均有滤波结果;而在本文算法中,大多数位置均已在前面滤除,图5(b)中这些位置以输出0表示.

图5 在2帧图像上的检测结果对比
在实时性方面,本文算法不仅满足了25 frame/s的实时处理速度要求,而且为后续跟踪算法预留了充分时间.而IMEF算法对每帧图像需要逐像素进行局部背景估计,且每像素处理均需涉及矩阵运算,因此在较大尺寸图像上还需进行改进才能满足实时性要求.
5 结语
针对小目标在局部呈现极值的特点,提出了一种监督特征学习方法.统计目标与非目标邻域内的分布差异,得到特征空间;设计级联分类器,有效滤除非目标,实现了快速检测.本算法对全局图像只进行局部极值搜索,避免了传统滤波方法中逐点计算加权平均,提高了实时性.实验表明,在较大尺寸复杂背景视频序列上可以取得良好的检测结果.
References)
[1]Tomasz A,Marcin K,Popiela T J,et al.Detection of clustered microcalcifications in small field digital mammography[J].Computer Methods and Programs in Biomedicine,2006,81(1):56-65.
[2]Bai X,Zhou F.Analysis of new top-hat transformation and the application for infrared dim small target detection [J]. PatternRecognition, 2010, 43(6):2145-2156.
[3]杨磊.复杂背景条件下的红外小目标检测与跟踪算法研究[D].上海:上海交通大学图像处理与模式识别研究所,2006.
[4]刘靳,姬红兵.基于非平稳背景下的红外小目标检测[J].电子与信息学报,2010,32(6):1295-1300.Liu Jin,Ji Hongbing.IR small targets detection based on non-homogeneous background[J].Journal of Electronics and Information Technology,2010,32(6):1295-1300.(in Chinese)
[5]朱金标,李建勋.匹配滤波器优化设计及在红外弱小点目标检测中的应用[J].光学学报,2009,29(8):2128-2133.Zhu Jinbiao,Li Jianxun.Novel matching filter design and its application on dim point target detection in infrared image[J].Acta Optica Sinica,2009,29(8):2128-2133.(in Chinese)
[6]Yang Q,Tan K,Ahuja N.Real-time O(1)bilateral filtering[C]//Proc of the Computer Vision and Pattern Recognition.Miami,USA,2009:557-564.
[7]王鑫,唐振民.基于特征融合的粒子滤波在红外小目标跟踪中的应用[J].中国图像图形学报,2010,15(1):91-97.
Wang Xin,Tang Zhenmin.Application of particle filter based on feature fusion in small IR target tracking[J].Journal of Image and Graphics,2010,15(1):91-97.(in Chinese)
[8]Tang Z,Wang X.An efficient algorithm for infrared small target detection[C]//Proc of the 2nd International Conference on Information and Computing Science.Manchester,UK,2009:51-54.
[9]杨磊,杨杰,凌建国,等.一种红外大视场环境下的多小目标实时检测方法[J].红外与毫米波学报,2006,25(5):377-381.
Yang Lei,Yang Jie,Ling Jianguo,et al.Real-time method for detecting multi-small targets in infrared large sight field[J].Journal of Infrared and Millimeter Waves,2006,25(5):377-381.(in Chinese)
[10]Viola P,Jones M.Rapid object detection using a boosted cascade of simple features[C]//Proc of the Computer Vision and Pattern Recognition. Kauai,HI,USA,2001:1511-1518.
[11]Friedman J,Hastie T,Tibshirani R.The elements of statistical learning[M].New York:Springer,2008:119-121.
[12]Tipping M E.Sparse Bayesian learning and the relevance vector machine[J].Journal of Machine Learning Research,2001,1:211-244.
[13]张蕴奇.红外预警系统中的图像显示与目标检测方法研究[D].西安:西安电子科技大学电子工程学院,2006.
[14]Hamdulla A,Lian X.High-resolution Bayes detection of dim moving point target in IR image sequence using probabilistic data association filter[C]//Proc of the Computer Science and Software Engineering.Wuhan,China,2008:365-368.
