面向目标侦测的非配合式无线传感器网络研究*
2011-05-06曹奕涛
杨 波,曹奕涛
(北京航空航天大学自动化科学与电气工程学院,北京100191)
军用无人机是充分利用信息技术革命成果而发展起来的一种高性能信息化武器装备,它的一个重要作用就是实施侦察功能,进行战略、战役和战术侦察。随着信息战的日益多样化和复杂化,在很多情况下,仅仅靠无人机飞过目标很难预计或预测以后的变化,在日益复杂的作战背景下,单凭无人机的力量不足以完成侦察目标的任务,需要把远距传感器放到接近目标的地方,监视目标的一举一动,协同无人机执行侦察任务。
本文结合军事侦查需求,主要研究无线传感器网络在军事领域尤其是军事入侵检测领域的应用,目前,对进入监测领域目标进行识别与跟踪是无线传感器网络研究中的热点,也是研究难点,具有重要的理论意义和实用价值[1-5]。因此,本文主要研究在传感器节点能量、处理能力等资源严重受限的情况下实现对重点区域的目标监测、识别与轨迹预测。
非配合式无线传感器网络系统常用于军事领域中的战场监视、民用领域中的入侵监测等应用中。与配合式系统相比,非配合式系统的难度显著增加,因为目标不能发出特征已知的信号配合网络的侦测,需要在低成本的传感器节点上实现准确的目标检测与目标识别算法,同时降低系统的虚警率与漏检率[6-11]。国内在无线传感器网络领域对配合式的目标跟踪与定位研究较多,但对非配合的目标跟踪研究还处于起步阶段。如何将复杂的频谱分析、滤波算法等信号处理方法应用到资源有限的传感器节点上,是非配合式系统最大的挑战。准确提取目标特征非常重要,需要有全面的应用背景知识作为基础。此外,由于无法预知非配合式目标何时出现,必须在目标未出现时系统的低能耗与目标出现时系统响应的灵敏性之间进行权衡。
1 硬件系统
无线传感器网络硬件节点的无线通信模块和处理器模块选用协议芯片CC2430,电源模块采用外部5V直流供电和电池供电两种方式,方便调试。
考虑到检测目标主要针对战场环境中的人员与车辆,人又分为普通行人与武装人员,武装人员带有枪支等具有铁磁特性的物质。可以采用传感器敏感目标的不同特征,如声音、震动、磁场等。在选择传感器时,像图像和雷达等传感器虽然目标信息丰富,但不适于能量和处理资源有限的无线传感器网络节点。那些只需简单处理算法且低功耗的传感器可以通过组合方式和多传感器信息融合,从而达到较高的检测率和较低的分类错误率。因此,本文最终选择声音、磁阻和红外传感器三种传感器。
通过这几种传感器的数据融合,按照以下逻辑关系可以实现对三类目标的检测和分类。
普通行人检测动用红外传感器和磁阻传感器;武装人员检测动用红外传感器和磁阻传感器;车辆检测动用红外传感器、磁阻传感器和声音传感器。
声音传感器选用小型、低功耗和高灵敏度的传感器WM-62A;磁阻传感器为霍尼韦尔双轴线性磁阻传感器HMC1052;红外传感器选择瑞士Kube公司生产的C172型红外传感器及TR230菲涅尔透镜,该传感器具有低功耗、小体积和检测距离远等特点。由于红外传感器检测视角有方向性,可以通过四个红外传感器的组合实现全方位的目标检测。
表1中列出了三种传感器对不同目标的检测范围。在所使用的传感器中,红外传感器检测范围大,敏感所有目标,不易受到环境干扰,因此将其作为节点的“唤醒传感器”。当红外传感器检测到目标后,唤醒传感器节点后打开声音和磁阻传感器的供电电路,再利用多传感器的数据融合,实现对目标的可靠检测。
表1 不同传感器对不同目标的检测范围
研制的传感器节点实物图片如图1所示。
图1 传感器节点实物图片
2 传感器检测原理与多传感器数据融合
2.1 目标检测分析
目标分为四种情况:无目标、普通人员、武装人员和车辆。当无目标出现时,节点处于深度睡眠状态,节省能量;当红外传感器检测有目标出现时,节点被唤醒,其中车辆目标有典型的磁场和声音特征,武装人员与车辆区别在于有磁场特征但较弱,声音特征不明显,普通人员与武装人员相比没有典型的磁场特征。由于节点的能量和资源有限,无法采用高端处理器,因此特征量的提取主要采用时域处理方法,通过传感器数据融合,达到正确识别目标的目的。
检测和识别方案如图2所示。

图2 目标检测方案
2.2 传感器检测原理
2.2.1 红外传感器检测原理
红外传感器调理电路分为两路输出,一是模拟输出,接CC2430的P0.7口,二是数字输出,接P1.4口。当模拟输出端的电压超过数字端双限比较器的门槛电压后,数字端输出端由高电平变为低电平,产生下降沿信号,通过P1.4口达到唤醒处理器的目的。节点被唤醒后,处于正常工作状态,然后读取红外传感器模拟输出的值,当连续一段时间读到模拟输出在门槛电压之间时,处理器进入深度睡眠状态。这样一来,便可通过传感器模拟端输出电压变化和数字端输出电平变化实现处理器的睡眠与唤醒。
2.2.2 磁阻传感器检测原理
(1)磁阻传感器信号特征与分析
图3为磁阻传感器所做的测试示意图及高尔夫车辆经过时磁阻传感器A、B轴的输出波形,其中车辆与传感器的垂直距离为1 m,车辆行驶速度为10 km/h,采样周期为 0.002 s。
图3 磁阻传感器测试图及传感器输出信号
磁阻传感器信号变化比较缓慢,对磁阻传感器信号进行时域和频域分析,当车辆低速行驶时,从对信号的离散傅立叶变化得出信号主要集中在直流到50 Hz左右,因此可以通过简单的数字滤波和设置阈值实现车辆的可靠检测。
2 磁阻传感器检测算法
由于所处区域不同以及传感器节点摆放方向的不同,磁阻传感器的输出差异较大,所以首先要对传感器输出进行标定,通过软件实现,在程序初始化过程中,对磁阻传感器的输出进行连续10次采样,去掉最大值和最小值,再对剩下的8次采样值取算术平均,作为每个轴的输出标准。
对磁阻传感器的采样采用中值滤波。中值滤波法比较适用于去掉偶然因素引起的波动和采样器不稳定而引起的脉动干扰。将每次采样的值存入数组,当达到第10个数后,将传感器所得的10次采样值分别与设定的检测阈值做比较,当检测到采样所得值超过阈值时,计数器加1,当计数器值大于3时,即认为检测到目标。由于磁阻传感器有两路输出,分别对两路输出做以上判断,即可达到对目标的可靠检测(图4)。

图4 磁阻传感器检测原理图
2.2.3 声音传感器检测原理
声音传感器的信号输出较为复杂,信号极易受到干扰,由于实验室条件所限和实际测试的困难,在实验室条件下用蜂鸣器声音代替车辆经过的声音。图5(a)声音传感器检测蜂鸣器产生的声音信号,横轴虚线间隔为 250 μs,采样周期 1 μs,图 5(b)为人员脚步走动时声音传感器采集到的声音信号,横轴虚线间隔为250 ms,采样周期为1 ms。
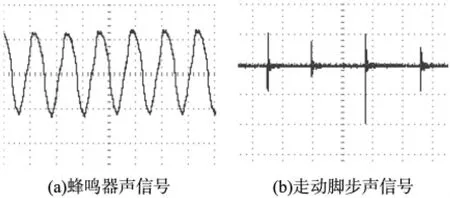
图5 蜂鸣器产生的声音信号及人员脚步声音信号
人员走动与车辆行驶产生的声音信号具有以下基本特征:
(1)探测目标信号同目标与传感器之间的距离有关,随着距离的增大,时域信号的幅值逐渐衰减。
(2)人员脚步信号是脉冲式的,且不同脚步的信号波形近似为离散的。而车辆运动产生的声音信号是连续变化的。此外,声音传感器对人员脚步声音的检测检测距离有限,只有在近距离通过时,才能保证可靠检测。对于车辆,则有较远的检测距离,在实验室条件下测试,对蜂鸣器的检测距离可以达到10 m~15 m。
采用过零数分析方法。当采样频率为1 kHz,采样时间为1 s时,每组有1 000个数据,对比可以发现,蜂鸣器产生的信号特征过零点数远大于人员脚步产生的信号特征的过零数,因此,选择合适的过零数分界点M,可以达到区分人员与车辆的目的,原理见图6所示。

图6 声音传感器检测原理图
2.3 多传感器数据融合
受到无线传感器网络节点检测能力、计算能力、能量资源、存储资源、带宽资源等限制,本文的多传感器数据融合采用分布式决策层融合结构。用于融合身份估计的技术包括Bayes推理、D-S方法等。由于D-S证据理论的广泛适用性,可以在不同层次上对证据进行组合,不需要先验概率和条件概率,能区分不确定和不知道,是Bayes理论的推广,所以系统采用D-S方法对多传感器的信息进行融合[12]。
2.3.1 融合系统结构
系统的任务之一就是识别目标(目标身份识别),所以探测单元中数据融合中心的融合方式属于目标识别级的融合。红外、声音和磁阻传感器分别都完成一定的变换来获得独立的身份估计,然后再在融合中心对来自每个传感器的属性分类进行融合。
数据融合框图如图7所示。
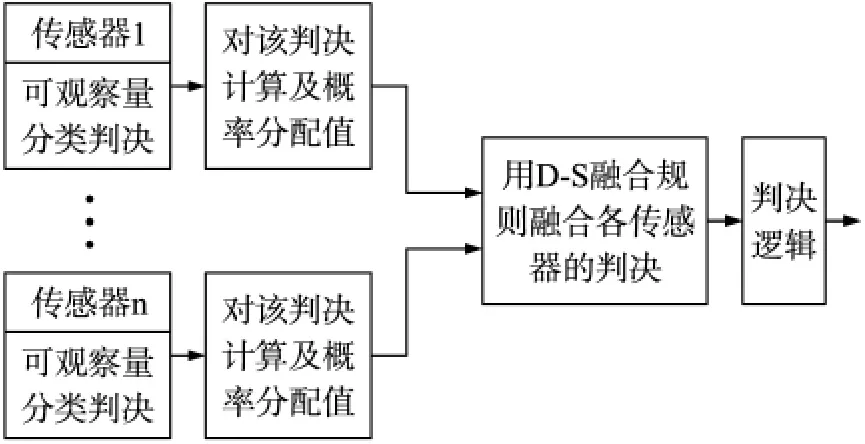
图7 融合系统框图
这里对每个传感器k(k=1…n,n=3)所能得到的知识即对物体类型的判别赋予一个0到1之间的概率分配值,即基本概率赋值,反映了对该判决的确信程度,赋值越接近于1,说明该判决越有明确的证据支持。
在多传感器探测系统中,系统检测部分集合了红外、声音和磁场三种传感器,分别对目标进行检测,传感器的原始数据经过一定的变换处理和特征提取后,得到了各自关于目标的身份估计,然后,各自的身份估计数据进行融合处理,按照一定的判决准则,得到全局的关于目标的身份判别。
2.3.2 基本概率赋值的获取及证据组合
实际应用中,基本概率赋值获得的方法有很多,根据试验情况,采用了利用统计证据来获得基本概率赋值的方法。
在实验室条件下,采用“人+玩具小车+铁磁物质+蜂鸣器”组合代表监测环境中的车辆目标,用“人+玩具小车”组合模拟监测环境中的武装人员。
根据检测系统要求,把检测目标集合定义为3种类型,即Θ={O1车辆、O2武装人员、O3普通行人}。
为了简化计算和表示,根据探测目标类型,定义铁磁物质目标O4={O1车辆、O2武装人员},定义人员目标O5={O2武装人员,O3普通行人}。设探测目标{O1,O5}的声音特征的声音传感器为X1;探测目标{O3,O4}磁场特征的磁阻传感器为X2;探测目标{O1,O2,O3}红外特征的红外传感器X3。
以目标O3为例说明基本概率赋值及证据组合过程,将目标O3作为实验目标,通过30次统计试验,得到了关于目标集合各个传感器的基本概率赋值如下:
传感器X1对目标集合Θ里目标的基本概率赋值如表2所示。

表2 传感器X1的基本概率赋值
传感器X2对目标集合Θ里目标的基本概率赋值如表3所示。
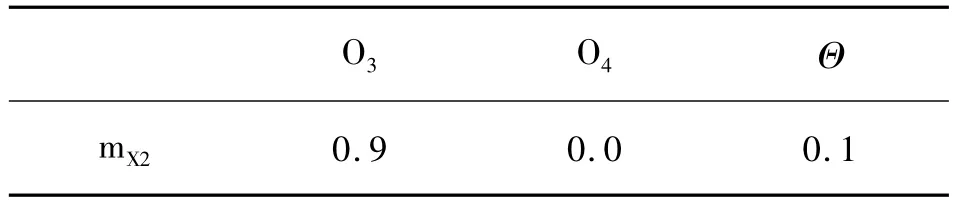
表3 传感器X2的基本概率赋值
根据D-S证据组合规则,将声音和磁阻传感器进行数据融合,组合情况如表4所示。
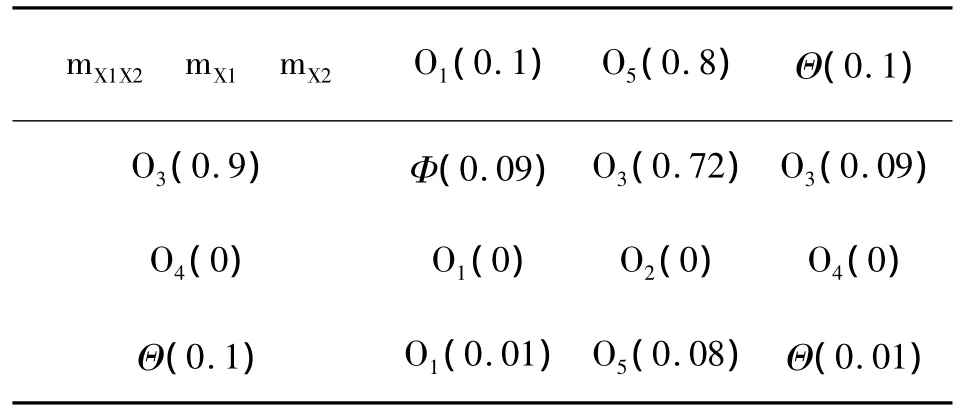
表4 传感器X1和X2融合表
根据前面所述的证据组合规则,从表上的数据可以看出,声音和磁阻传感器的证据组合的不一致因子 K=0.09。
于是得到组合后的基本概率赋值为:
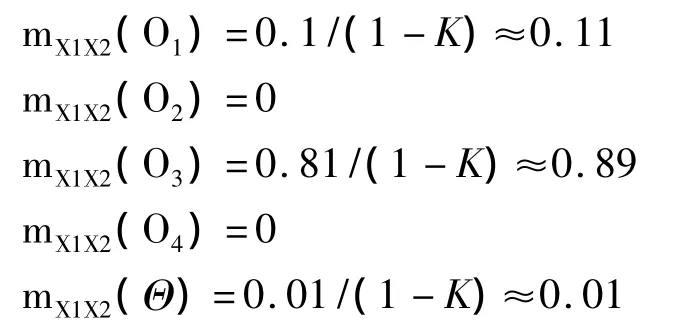
当采用基于概率赋值的决策方法时,若选择合适的判定门限,则最终决策为O3,即普通行人,从上面得出的融合的结果来看,融合和传感器节点目标识别的不确定性降低,且融合判别后的结果与实验的目标一致,证明融合是有效的。
对于目标的位置估计,参考双元检测协作跟踪的思想(图8),双元检测传感器不能检测到目标的距离,只能判断目标是否在侦测范围内[13]。因此检测到目标的节点只能确定包含目标的圆形区域,需要多个节点协作才能确定目标的位置信息。当目标进入侦测区域后,在节点足够密集的情况下,任何时刻都有多个节点同时侦测到目标的位置区域。这些节点侦测范围的重叠区域是一个相对较小的区域,目标就处于这个重叠区域内,这样,就能相对精确的确定目标位置。基于双元检测的协作跟踪适用于简单低廉的传感器节点,并通过大量密集部署节点保证跟踪精度。基于双元检测的协作跟踪需要节点间的时钟同步,并要求节点知道自身的位置信息,当节点密度足够高时,我们也可以通过这种方式达到预测目标运动轨迹的目的。
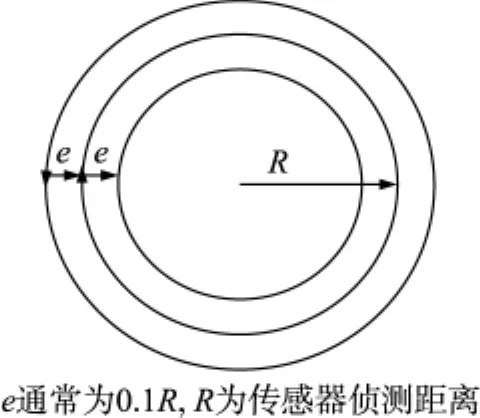
图8 双元检测模型
3 系统软件设计
系统软件主要三大部分组成:(1)汇聚节点软件负责网络组建与维护,接收检测节点发送的检测信息,经串口转发至上位机进行处理;(2)检测节点软件负责传感器信号采集与处理和传感器数据融合,同时将处理结果通过无线方式发送至汇聚节点;(3)上位机软件主要完成目标报警、目标检测结果显示及数据存储等功能。
软件部分主要介绍检测节点中传感器数据融合和身份判决的过程。
当得到各传感器的检测结果后,程序进入融合和判决部分。以数组的方式定义各传感器对不同目标的基本概率赋值。读取到正确数据并完成全部数据融合处理后,进入判别输出部分,实现对融合结果的身份判断。整个过程原理如图9所示。
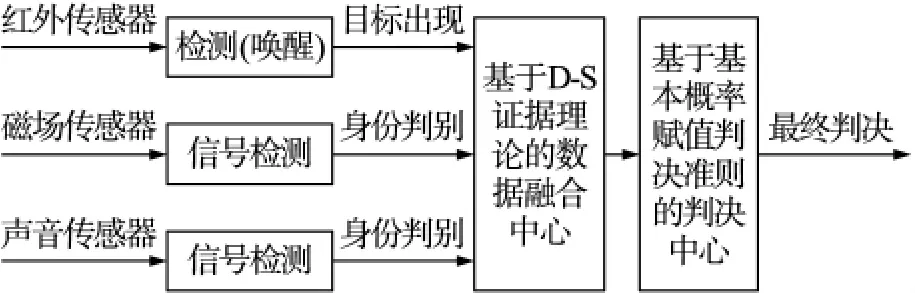
图9 多传感器数据融合原理图
4 实验平台搭建及实验测试
为了检验系统设计的有效性,分别进行了节点硬件设计测试、传感器节点组网测试、红外传感器睡眠唤醒测试、磁阻传感器检测测试、声音传感器检测测试及多传感器数据融合测试。
4.1 红外传感器唤醒功能测试
传感器节点的睡眠功能主要通过红外传感器来实现,每个节点有四个红外传感器,分别对应于四个方向(见图1)。各传感器检测视角约为100°,通过四个红外传感器可实现全方位目标检测。无目标时,传感器节点进入睡眠状态,LED1灭。当有目标进入后,传感器节点被唤醒,LED1亮,目标消失后,LED1灭,节点睡眠。经过测试,红外传感器对目标唤醒距离为8 m~10 m,可以实现全方位的目标检测。
4.2 磁阻传感器检测测试
在实验室搭建如下平台,五个节点组成星型网络,玩具小车为实验过程中的检测目标,车上装有铁磁物质。四个检测节点如图10所示,间隔为70 cm×70 cm,检测节点对小车的检测范围大约40 cm,一个汇聚节点通过串口与计算机相连。

图10 从节点监控阵列及主节点与监控终端
上位机测试软件采用四个绿色小圆圈代表图9中的传感器检测节点,当目标进入检测区域时,上位机通过判断,将图中该传感器节点的绿色小圆圈变为红色。节点密度足够高时,可以通过这种方式达到估计目标运动轨迹的目的
当装有铁磁物质的玩具小车沿着图11所示直线运动时,发现首先1号节点由绿色变为红色,然后3号节点由绿色变为红色。当小车离开传感器节点检测区域后,可以估计小车运动轨迹如图12中的黑粗箭头所示。当不含铁磁物质的玩具小车沿上述轨迹运动时,软件中没有任何传感器节点变为红色,可以判断无目标进入器监测区域。
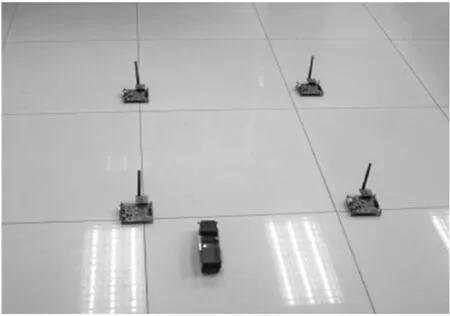
图11 玩具小车运动轨迹图
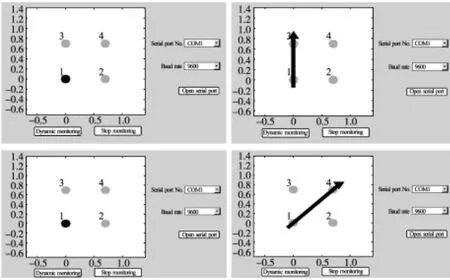
图12 上位机监控软件实时显示
4.3 声音传感器检测测试
主要验证检测算法对声音信号可靠检测及区分车辆连续声音信号和脉冲信号特征。
当检测节点检测到蜂鸣器连续声音信号特征或脚步等具有脉冲信号特征的声音后,分别向汇聚节点发送数据帧0×01和0×02,在上位机串口调试助手的接收端显示接收数据。经过蜂鸣器和在节点附近走动多次测试后,均能够检测到目标,同时可以区分出不同的声音信号特征。
4.4 多传感器数据融合测试
多传感器数据融合测试为了验证数据融合在提高检测精度和目标识别率方面的作用。
4.4.1 测试方法
由于红外传感器在系统中主要起到睡眠唤醒的作用,当红外传感器检测到目标后,节点唤醒,这时认为有三类目标进入监测领域,声音和磁阻传感器开始工作,通过传感器的数据融合,达到对目标更深入的检测和识别。
如前所述,实验室条件下采用“人+玩具小车+铁磁物质+蜂鸣器”组合代表监测环境中的车辆目标,“人+玩具小车”组合模拟监测环境中的武装人员。
实验平台同图11类似,五个节点组成星型网络,四个检测节点布成方形阵列,彼此间隔为14 m×14 m(红外传感器节点对人员检测距离为8 m~10 m,节点检测范围有重叠),主节点通过串口与计算机相连。
4.4.2 测试步骤
(1)红外传感器睡眠唤醒测试30次;
(2)声音传感器对三类目标分别进行30次测试;
(3)磁阻传感器对三类目标分别进行30次测试;
(4)磁阻传感器和声音传感器数据融合对三类目标分别进行30次测试。
4.4.3 测试结果及分析
(1)声音传感器对目标检测测试结果记录如表5~表7所示。

表5 声音传感器对车辆测试结果
检测精度:86.7%;识别精度:86.7%

表6 声音传感器对武装人员测试结果
检测精度:83.3%;识别精度:武装人员与普通行人无法区分。

表7 声音传感器对普通行人测试结果
检测精度:80%;识别精度:武装人员与普通行人无法区分。
(2)磁阻传感器对目标检测测试结果记录如表8~表10所示。

表8 磁阻传感器对车辆测试结果
检测精度:93.3%;识别精度:车辆与武装人员无法区分。

表9 磁阻传感器对武装人员测试结果
检测精度:96.7%;识别精度:车辆与武装人员无法区分。

表10 磁阻传感器对普通行人测试结果
检测精度:100%;识别精度:100%
特别说明:由于普通行人不具有磁场特征,因此磁阻传感器无法对其进行检测。但节点被唤醒后,认为确有三类目标进入监测区域,而车辆武装人员均具有典型磁场特征,因此节点唤醒状态下,如无磁场特征,则认为目标是普通行人。
(3)声音与磁阻传感器数据融合后对目标检测测试结果表11~表13所示。

表11 多传感器数据融合后对车辆测试结果
检测精度:96.7%;识别精度:96.7%

表12 多传感器数据融合后对武装人员测试结果
检测精度:93.3%;识别精度:93.3%

表13 多传感器数据融合后对普通行人测试结果
检测精度:90%;识别精度:90%
以上记录了各种情况下的测试结果,并对各种情况下的检测精度和识别精度做了计算。经过对比我们可以得出以下结论:
(1)经过数据融合对目标检测和识别精度比用单个声音传感器对目标进行检测与识别有了显著提高,尤其是用单个声音传感器往往无法区分目标中的普通行人与武装人员,而经过数据融合,可以得到较高的识别精度。
(2)经过数据融合后的检测结果与用单个磁阻传感器对目标的检测相比,检测精度变化不大,磁阻传感器对铁磁和非铁磁物质有较好的区分度,但目标识别精度显著提高。用磁阻传感器往往对目标中的车辆与武装人员无法区分。
(3)采用的数据融合方法简单且有效可行,运用多传感器数据融合技术可以获得比单个、孤立的传感器更加详细而精确的结论。
5 结论
由于自身资源所限,采用非配合式无线传感器网络实现目标的检测、识别与轨迹估计极具挑战性。本文结合战场目标侦测需求,设计和实现了适合于低成本与低功耗的非配合式无线传感器网络系统,利用“唤醒传感器“设计了能量节省机制,采用简单有效的算法利用多传感器数据融合实现了实验室条件下的目标检测、识别与轨迹估计。实验结果表明,该系统符合设计要求,目标检测和识别精度高,并且可以实现目标运动轨迹的有效估计。
[1]Akyildiz I,Su W,Sankarasubramaniam Y,et al.A Survey on Sensor Networks[J].IEEE Communications Magazine,2002(8):102-114.
[2]孙利民,李建中,陈渝,等.无线传感器网络[M].清华大学出版社,2005.
[3]Arora A,Dutta P,Bapat S.A Line in the Sand:a Wireless Detection,Classification,and Tracking[J].Computer Networks:The Sensor Network for Target International Journal of Computer and Telecommunications Networking,200,446(5):605 -634,12.
[4]Tian He,Pascal Vicaire.Achieving Long-Term Surveillance in Vigilnet[C]//Proceedings of the INFOCOM 2006,2006.
[5]Gyula Simon,Miklds Mardti,Akos Ledeczi.Sensor Network-Based Countersniper System[C]//Proceedings of the 2nd International Conference on Embedded Networked Sensor Systems,Batimore,MD,USA,2004:1 -12.
[6]高战强.无线传感器网络中基于目标跟踪的数据融合研究与实现[D].太原:太原理工大学,2008.
[7]申兴发.基于无线传感器网络的分布式跟踪系统[D].杭州:浙江大学,2007.
[8]杨宏斌.无线传感器网络军事应用研究[J].舰船电子工程,2007,27(5):41 -43.
[9]刘博.无线传感器网络中的目标跟踪技术[J].中兴通讯技术,2008,14(1):48 -53.
[10]Zhao F,Shin J,Reich J.Information-Driven Dynamic Sensor Collaboration for Tracking Application[J].IEEE Signal Processing Magazine,March 2002.
[11]Prabal K D.On Random Event Detection with Wireless Sensor Networks[D].USA:The Ohio State University,2004.
[12]康嫩红.数据融合理论与应用[M].西安电子科技大学出版社,西安,2006.
[13]Mechitov K,Sundresh S,Kwon Y,et al.Cooperative Tracking with Binary-Detection Sensor Networks[C]//Proceeding 1st Int.Conf.on Embedded Networked Sensor System(SenSys03),Los Angeles,CA,November 5 -7,2003.
