一种新型平板式压电六维力/力矩传感器及仿真实验*
2011-05-06刘京诚
刘 俊,秦 岚*,李 敏,刘京诚,薛 联
(1.重庆大学光电技术及系统教育部重点实验室,重庆400044;2.四川理工学院,四川 自贡629200)
弹射座椅是影响飞行员身体健康的关键设备,也是在飞机出现危急情况时进行弹射逃生的重要救生装备。座椅动态乘坐舒适性是影响飞行员身体健康的直接因素,人椅系统在弹射出舱后的良好稳定性是决定飞行员能否实现安全救生的关键因素之一。人椅系统动态特性的实时测试数据可以为座椅的舒适性调节提供帮助,人椅系统的组合重心数据是座椅弹射动力稳定性调节设计的关键依据[1-2]。目前对人椅系统重心分布模型的研究主要是运用静态测试结合统计分析的方法[2],而对座椅动态特性的研究主要是通过建立座椅系统动力学模型来预测[3],且未能得到实际工作条件下的实际测试数据。六维力/力矩(以下简称六维力)传感器可以实现对人椅系统重心位置和动态特性的测试[4-6],能装载在座椅上的平板式六维力传感器能提供人椅系统重心位置和动态特性的实时测试数据。
从传感元件测量被测量原理的角度上看,现有的六维力传感器可分为弹性体式和非弹性体式两类。弹性体式由于存在感知和测量外力信息的弹性体,导致其始终存在:弹性体结构复杂程度与解耦之间的矛盾问题[7]、高固有频率与高灵敏度之间的矛盾问题[8]、弹性体质量大小与解耦之间的矛盾问题[9]等三大瓶颈矛盾问题。这些瓶颈问题不同程度影响了传感器性能的进一步提升,制约着多维力传感器应用空间的拓展。为此,研究者开始了对直接感知被测力这种测量原理的非弹性体式六维力传感器的研究,这类六维力传感器选用压电元件作为传感元件,但目前对其研究很少。刘巍等[10]将压电石英晶片嵌入Stewart平台的6条腿内部,每条腿通过球铰与上下平台相连,但未见其后续相关理论研究结论;孙宝元等[11]将四个三维压电力传感器均匀分布在同一圆周上并夹装在上下安装平台之间,实现了对大力值的测量,解耦后维间耦合干扰低于3%,固有频率低于5 kHz,X和Y向的载荷分布比例低于8%。上述研究成果很好地克服了现有弹性体式六维力传感器的瓶颈矛盾,但由于无法直接安装在座椅下方,难以直接用于人椅系统重心位置和动态特性的实时测量中。
为此,本文提出了一种具有高刚度、高灵敏度、高固有频率,可加工较大安装面积、厚度小等特点的能安装在座椅安装面上、能实现对作用力(即人椅重心)空间位置和动态特性实时测量的平板式压电六维力传感器,讨论了其数学模型,运用ANSYS软件对传感器的静、动态特性进行了仿真,并对载荷传递系数、耦合特性和退耦矩阵等参数进行了研究,得到了预想的实测结果。
1 传感器的结构与工作原理
自Kistler公司成功研制出电荷放大器以来,石英晶体以其优越的特性被广泛用于力和加速度的测量[12]。压电式力传感器按照石英晶片结构分类可以分为整体式和分列式(也叫平面展开式、阵列式)两种。整体式是指内部压电晶片为一个完整的圆片或圆环状片,分列式是指若干组小型晶体元件以一定规律均匀排列在力传感器内的晶片布置形式。整体式结构能够减少传感器的截面积,但设计的多维力传感器维数不能大于3,无法用于做大尺寸六维力传感器,且由于石英晶片为空间堆叠结构,故而难以用MEMS工艺实现,分列式结构可以避免整体式结构的这些弱点。
图1为平板式压电六维力传感器的实物照片,本传感器属分列式结构,主要由盖子、石英晶片组、信号输出电极、绝缘填充剂和基座组成。基座和盖子均属于一次加工成型,在施加适当预应力后,运用电子束焊接技术将盖子和基座焊接在一起;绝缘填充剂是为了保证传感器内部信号传输线之间的高绝缘性;夹装在盖子和基座的晶片安装凸台上的石英晶片组均匀分布在同一圆周上。为了克服维间干扰,所有的石英晶片均选用圆形;为了提高文献[11]设计方案中传感器的刚度,进一步简化文献[13]中传感器的结构,作者提出了如图2所示的石英晶片组八点支撑分布结构。八组石英晶片组均匀分布在同一圆周上,四组Y00切型石英晶片组分布在X、Y轴与圆周的交点上,承担对FX、FY和MZ三个参量的测量;四组X00切型石英晶片组分布在其它四个位置,承担对参量FZ、Mx和My的测量。
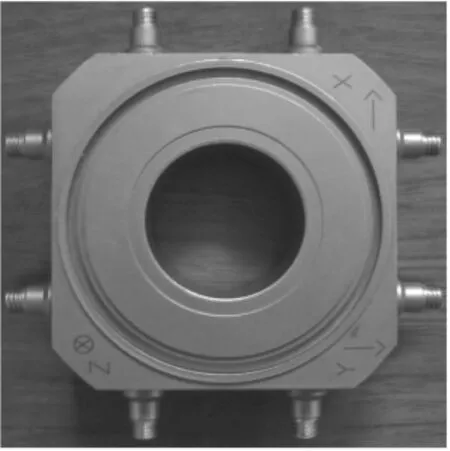
图1 压电六维力/力矩传感器照片
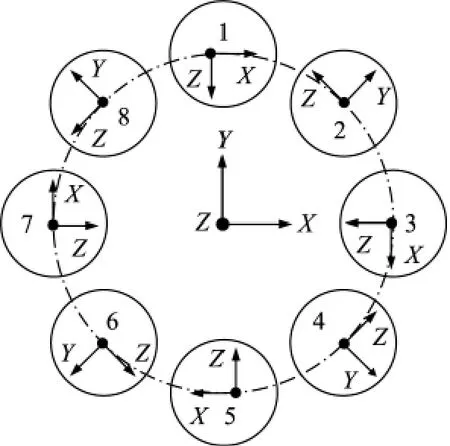
图2 石英晶片组布局
2 传感器的静态数学模型
图3是传感器的结构简图,八组石英晶片组均匀分布的圆周半径为R,四组X00切型石英晶片组分布在边长为的正方形四个角上,即与传感器的几何中心的距离为,传感器的力作用点与石英晶片表面的距离为b,Mx(My)对Fy(Fx)产生的耦合力臂系数为a,O-XYZ为被测力作用点的坐标系,O1-X1Y1Z1是压电石英晶片的安装布局位置坐标系。为了简化分析,对传感器的受力作如下假设:传感器盖子为刚体,且各向刚度相同,灵敏度相等且均匀分布;力FZ、力矩Mx和My在八组石英晶片组之间按杠杆原则分布;力FX、FY、力矩MZ在八组石英晶片组之间平均分配。设被测外力/力矩分别为 fX、fY、fZ、mX、mY和 mZ,石英晶片响应输出为FX、FY、FZ、Mx、My和 MZ,当外力/力矩作用在传感器盖子的中心上时,则各组石英晶片组上的分力可用如下数学关系式表示:
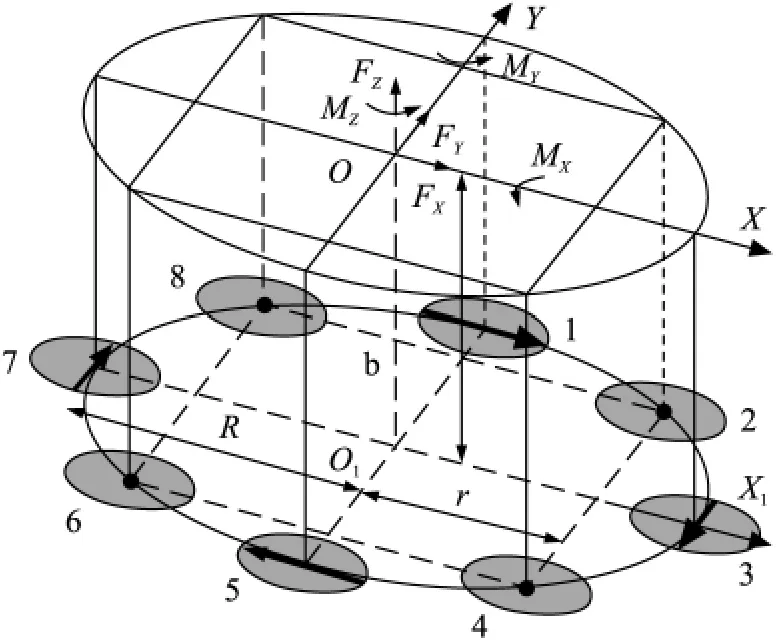
图3 传感器结构简图
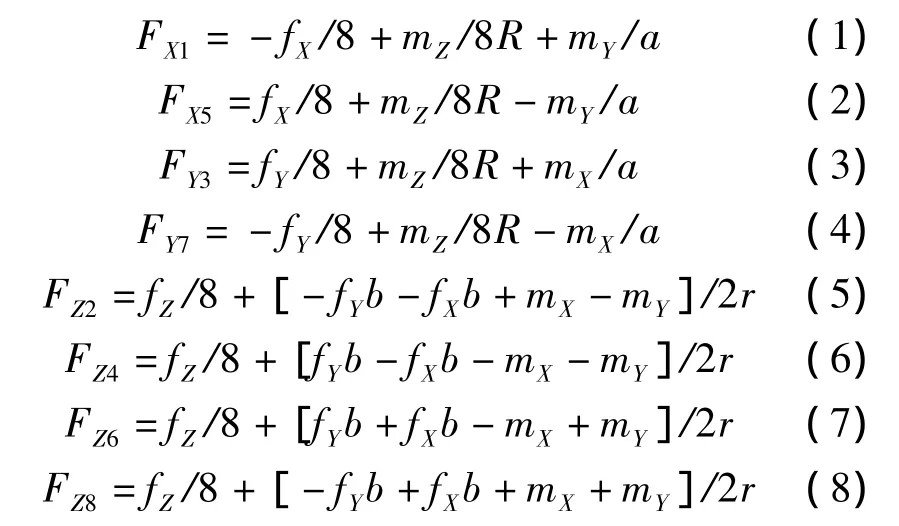
根据空间力系的平衡原理,能够得到:
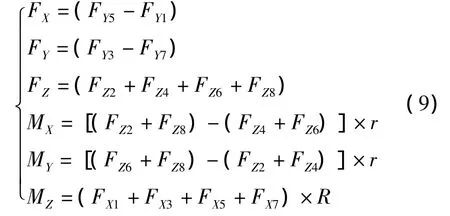
由于实际中,并不完全满足上述假设条件,故需要引入 kfX、kfY、kfZ、kmX、kmY和 kmZ等载荷传递效率(比例)的概念,这些参数由传感器的结构、石英晶片组的分布形式、数量和制作工艺水平决定。
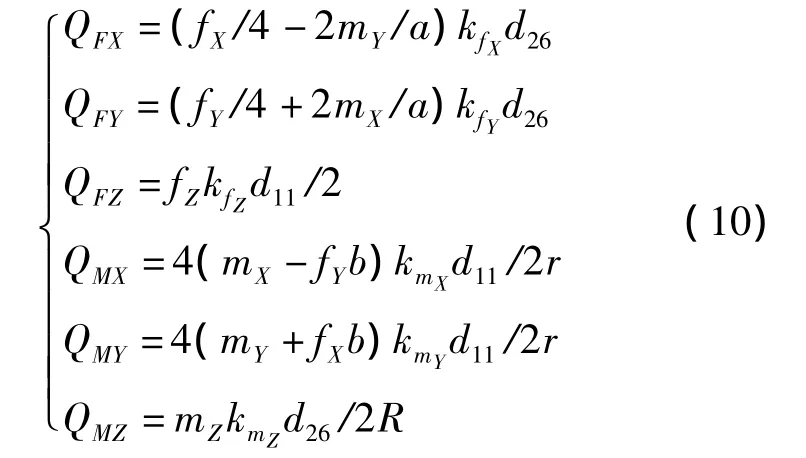
根据压电系数矩阵,结合式(9)很容易得到六维力传感器的六路输出电荷输出响应如式(10)所示(d11=2.31 pC/N、d26=4.62 pC/N),理论上在忽略六维力传感器结构影响的条件下,六维力/力矩之间没有相互的维间干扰,但实际情况中,由于传感器盖子厚度的影响,Fx与MY、FY与MX相互之间存在交叉耦合,需要对传感器的六路输出进行解耦计算才能得到被测量。
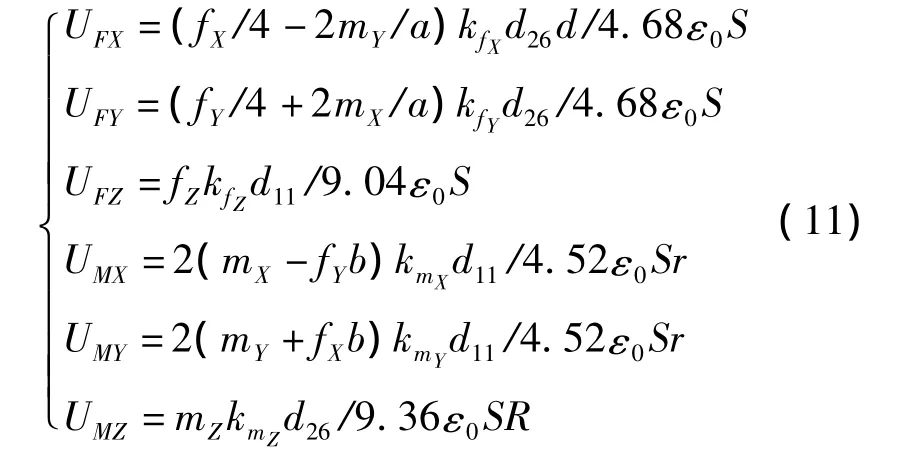
由于石英晶片可以看成是一块薄平行板电容器,依据式C=ε0εrS/d(其中εr为石英的相对介电常数,X00切型石英晶片取4.52,Y00石英晶片取4.68,d 为石英晶片厚度,ε0为介电常数)、Q=CU可得到传感器六路输出电势差:
3 传感器的仿真实验
根据传感器的研制指标要求(Fx、FY和Fz的测量范围都为0~1 000 N,MX、MY和MZ的测量范围都为0~100 N·m,解耦后的维间耦合<=5%),结合传感器尺寸紧凑的设计思路,传感器主要部件的结构尺寸见表1。
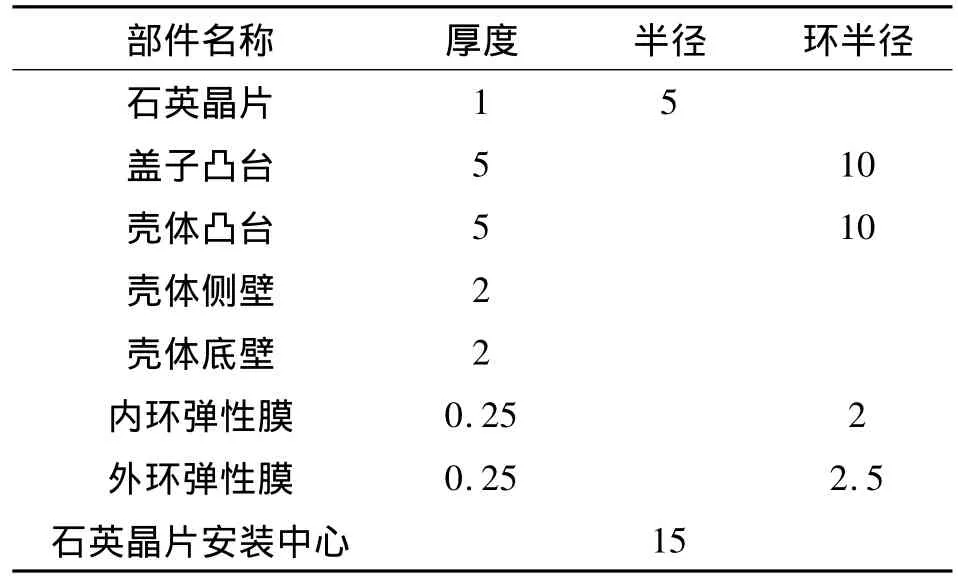
表1 传感器模型参数 (单位:mm)
3.1 FEM建模
ANSYS软件具有强大的耦合场分析能力,是目前压电分析的首选软件。在进行有限元建模过程中,首先运用Solidwork2006建立传感器的结构模型,然后借助ANSYS提供给Solidwork2006的接口将模型导入ANSYS中,选用耦合单元SOLID98作为石英晶体的单元类型,并且输入石英晶体材料的压电系数,弹性系数和介电常数矩阵,同时按照图2中晶片组的布局要求为每一组晶片组建立局部坐标系,选用映射方式划分网格。其它的部件材料选用不锈钢,弹性模量 E=2 ×1011Pa,泊松比 μ =0.3,单元类型选用SOLID95,对这些结构采用手动控制等分份数和自由网格划分相结合的方式划分网格,得到传感器结构的有限元模型,如图4所示。
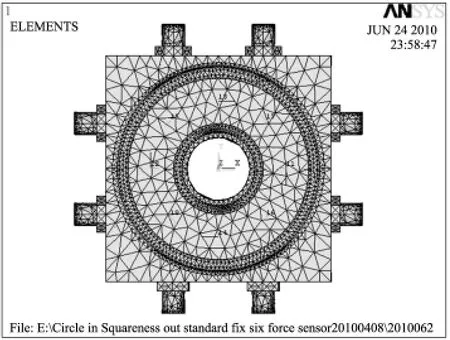
图4 传感器有限元模型
3.2 载荷施加与求解
载荷施加主要包括约束和集中力/力矩载荷加载两部分工作,在进行约束设置时,完全按照压电式六维力传感器安装状态进行相应设置,预紧力通过盖子的断面施加,基座的安装面的全部自由度设为0,同时,为了去除实际中预紧装置的影响研究本传感器在理想工作状态下的特性,特将传感器盖子下表面、石英晶片和石英晶片安装面之间的接触状态设为始终绑定状态。
为了模拟理想的集中力/力矩载荷加载情况,外载荷通过建立在Z轴上且与传感器盖子的上表面同平面上的关键点施加,关键点与盖子上表面形成刚性区。分别在FX、FY、FZ三个方向单独施加0~1 000 N的外力,在MX、MY、MZ三个方向单独施加0~100 N·m 的力矩,然后分别进行求解,通过应力、电势差、应变云图、模态分析、谐响分析等研究传感器的特性。
3.3 静态特性仿真分析
由于ANSYS耦合场分析得到的是传感器各组石英晶片面上的电势差,要得到传感器的电荷灵敏度可以通过式(10)~式(11)来转换。图5~图10分别是传感器FX、FY、FZ、MX、MY和 MZ方向的输入 -输出力 -电荷曲线,表2是六维力传感器在未使用解耦矩阵前电荷灵敏度和维间干扰仿真结果,表中FX、FY、FZ的灵敏度单位为pC/N,MX、MY、MZ的灵敏度为单位为pC/N·m。
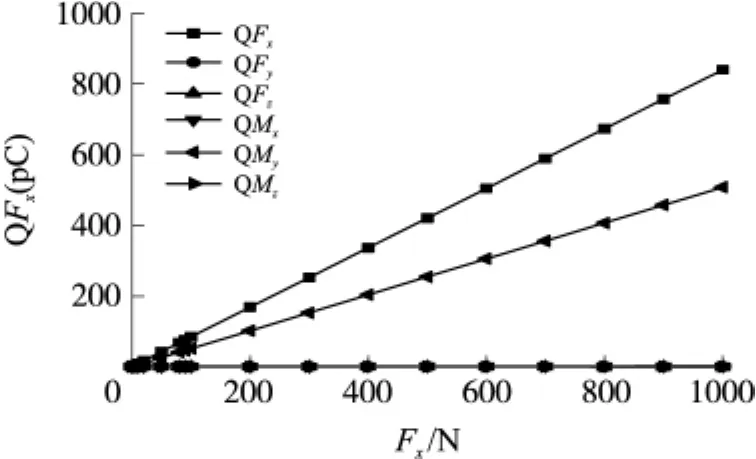
图5 FX输入/出力-电荷曲线
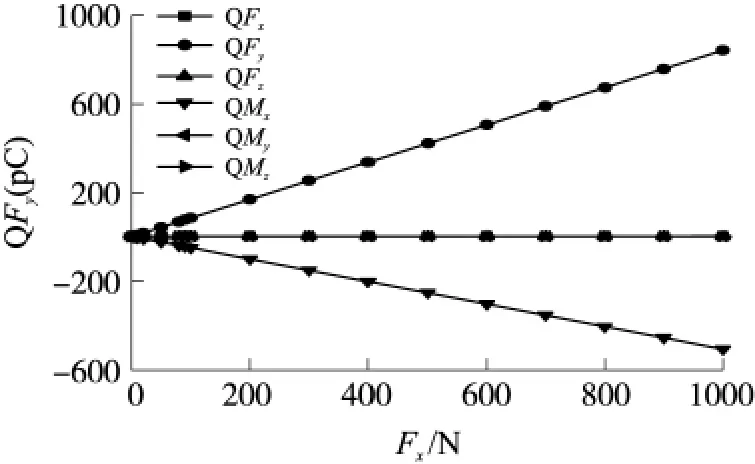
图6 FY输入/出力-电荷曲线
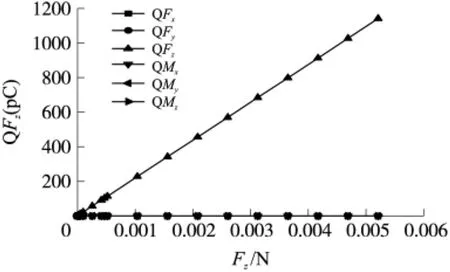
图7 FZ输入/出力-电荷曲线
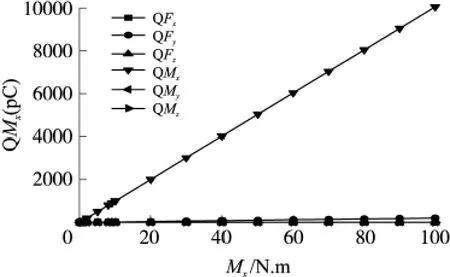
图8 MX输入/出力-电荷曲线
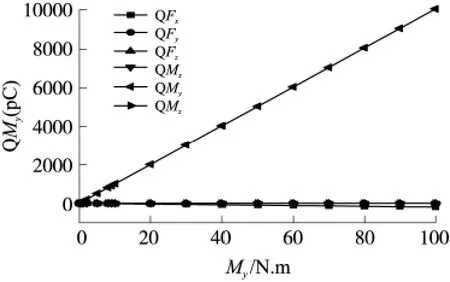
图9 MY输入/出力-电荷曲线
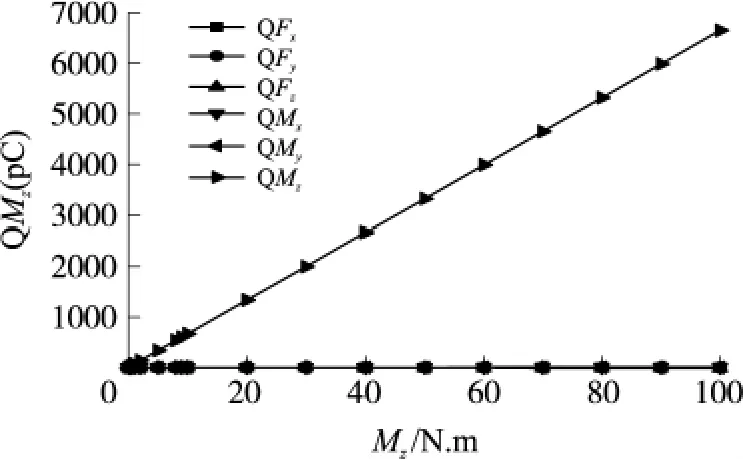
图10 MZ输入/出力-电荷曲线
结合式(10)和仿真结果可以看出:六维力传感器FX、FY、FZ、MX、MY和 MZ各维的力—电荷灵敏度分别为0.84 pC/N、0.84 pC/N、1.14 pc/N、100.75 pC/N·m、100.75 pC/N·m、66.45 pC/N·m;在未使用退耦矩阵前,FZ、MX、MY和 MZ维输出的维间干扰小于2%,FX(FY)维输出受MY(MX)的影响很大,维间干扰高达60.5%,必须要通过退耦矩阵来消除。
根据传感器在 fX、fY、fZ、mX、mY、mZ分别为1 N 或1 N·m作用下的输出结果,结合式(9)可构建的6×6方阵Uij,据此可得到传感器的退耦矩阵为Cij=[(Uij)T]-1=
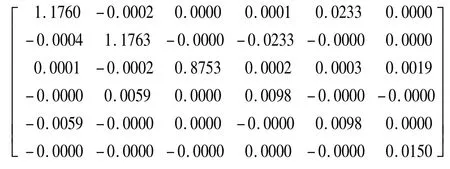
当同时加载6个力/力矩时,把传感器的8路电荷输出信号用电荷放大器转换成电压信号后,根据式(9)所示的解算方法,可以得到6×1的解算输出信号矩阵,将退耦矩阵与此矩阵相乘就可得到传感器的退耦输出结果。仿真结果表明,解耦后传感器的最大测量误差≤0.61%,维间交叉耦合≤0.48%。
由于受六维力传感器结构的影响,kfX、kfY、kfZ、kmX、kmY和kmZ等载荷传递效率不尽相同,石英晶片的力—电转换效率与载荷传递效率直接相关,且在Fx、Fy和Fz三个方向上载荷传递效率与石英晶片的力—电转换效率相等。对石英晶片的力电转换效率研究,可以采用单片石英晶片的力-电荷灵敏度与该切型晶片实际的压电系数相比较的方法。根据d11=2.31 pC/N、d26=4.62 pC/N,结合表2 的数据可以计算得到X00和Y00切型石英晶片上产生的力-电荷灵敏度为2.285 ×10-12C/N 和3.361 ×10-12C/N,即力电转换效率分别为98.92%和72.75%,故kfX=kfY=0.727 5、kfZ=0.989 2。结合 X00和 Y00切型石英晶片力—电转换效率等前述结论,根据式(1)~式(9)可以进一步推算出 kmX=kmY=0.925 2、kmZ=0.431 5。
3.4 动态特性仿真分析
平板式压电六维力传感器的主要特性都与其固有频率有关,与输入信号无关,Mz方向的动态特性与Fx、Fy方向的动态特性直接相关,Mx和My方向的动态特性一致,且与Fz方向的动态特性直接相关(见式9),故对平板式压电六维力传感器动态特性的研究只需研究Fx、Fy、Fz三个力方向的动态特性即可。对传感器动态特性的仿真研究主要采用模态分析和谐响分析两种方法。
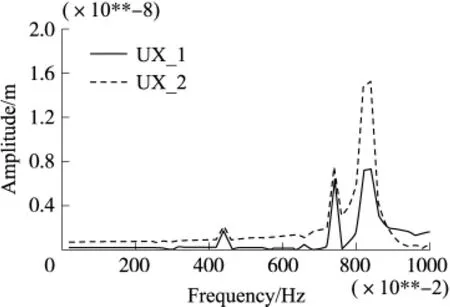
图11 Fx—幅度-频率响应曲线
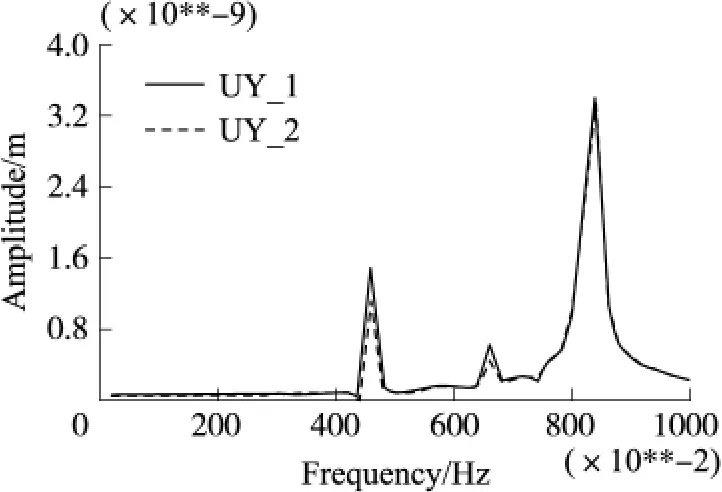
图12 Fy—幅度-频率响应曲线
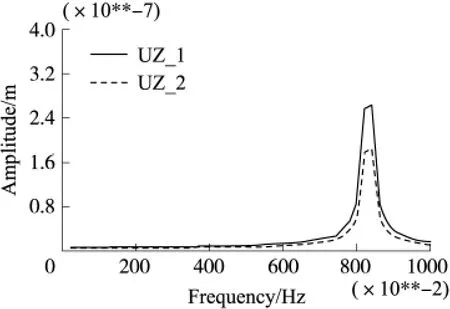
图13 Fz—幅度-频率响应曲线
固有频率和振型是承受动态载荷结构设计中的重要参数,运用ANSYS对传感器实施模态分析可以判断传感器的固有频率和振型,其一阶振动频率的2/3可作为传感器的固有频率[14]。仿真结果显示本传感器在Z向预应力条件下,1~6阶振动频率分别为 40 206 Hz、40 225 Hz、46 662 Hz、47 050 Hz、48 247 Hz、48 270 Hz,故其固有频率约为 26.8 kHz。
谐响分析是用于确定线性结构在承受随时间按正弦规律变化的载荷时的稳态响应的一种技术,分析的目的是计算结构在几种频率下的响应,找到峰值响应点。图11~图13是传感器在施加Z向预应力条件下,X、Y、Z三个方向的谐响曲线,由于传感器X和Y方向属于对称结构的缘故,故X、Y向的谐响分析结果是一致的,这与模态分析的结论一致。
4 结论
本文提出了一种新型平板式压电六维力/力矩传感器,并运用Solidwork软件建立了传感器的物理模型,推导了传感器的静态数学模型,采用ANSYS对传感器的静、动态性能进行了仿真实验研究。结果表明:仿真分析方法正确、数学模型有效,传感器固有频率>25kHz,使用退耦矩阵后传感器的维间干扰<1%,传感器结构满足设计要求。由于本文和文献[15]都采用了压电材料阵列式平面分布的设计思路,故而本文采用的设计方案亦适合研制基于MEMS工艺微六维力/力矩传感器,但Mz向载荷传递效率较低,还需要进一步对传感器的结构展开深入研究,以期进一步提高其性能。
[1]王春洁,曾福明.弹射座椅动态舒适性与人椅动力学特性研究[J].北京航空航天大学学报,2004,30(4):375 -378.
[2]孙明照,吴铭,苏迅,等.飞行员人体参数与人椅组合重心的回归分析研究[J].人类工效学,2005,11(2):23 -25.
[3]李宝峰,薛红军,宋笔锋.基于SIMULINK的弹射救生人椅系统六自由度仿真[J].系统仿真学报,2007,19(6):1379 -1382.
[4]Chung W Y,Waldron K J.Wrench Reconstruction by Using a Six-Axis Force Sensor[J].Mech.Mach.Theory,1995,30(3):383-389
[5]Ming hua Luo,Masanori Ito,Etsuro Shimizu,et al.Development of a Six-Axis Force/Tactile Sensor for Robot Finger by Employing Spring Beams[C]//Industrial Electronics Society,2003 IECON’03.The 29th Annual Conference of the IEEE 2 - 6 November,2003,2:1505 -1510.
[6]韩壮志,王田苗,张玉茹,等.基于指端6维力传感器的接触点测量算法研究[J].北京航空航天大学学报,2004,30(5):400-404.
[7]张为公.一种六维力传感器的新型布片和解耦方法[J].南京航空航天大学学报,1999,31(2):221 -222.
[8]Chao Lu-Ping,Chen Kuen-Tzong.Shape Optimal Design and Force Sensitivity Evaluation of Six-Axis Force Sensors[J].Sensors and Actuators A:Physical,1997,63(2):105 -112.
[9]吴宝元,吴仲城,申飞.多维加速度场中六维力传感器惯性耦合特性研究[J].传感技术学报,2008,21(10):1686 -1690.
[10]刘巍,林盛,贾振元,等.压电式六维大力传感器[P].中国,发明,申请号200710157931.2,2008-03-26:1 -8.
[11]Li Ying Jun,Sun Bao Yuan,Zhang Jun,et al.A Novel Parallel Piezoelectric Six-Axis Heavy Force/Torque Sensor[J].Measurement,2009,42(5):730 -736.
[12]刘俊,秦岚,刘京诚,等.一种新型差动式压电加速度传感器[J].光学精密工程,2007,15(6):903 -909.
[13]刘俊,秦岚,刘京诚等.一种平板式压电六维力传感器[P].中国,发明,ZL200810069720.8:1 -16.
[14]Song A G,Wu J,Qin G,et al.A Novel Self-Decoupled Four Degreeof-Freedom Wrist Force/Torque Sensor[C]//Measurement:Journal of the International Measurement Confederation,November/December 2007,40(9 -10):883 -891.
[15]Nemirovsky Y,Nemirovsky Z A,Muralt P,et al.Design of a Novel Thin Film Piezoelectric Accelerometer[J].Sensors and Actuators A:Physical,1996,(56):239 -249.
