自动编程器视觉定位算法研究*
2011-05-06段发阶董宇青
张 超,段发阶,董宇青,陈 伟,王 凯
(天津大学精密测试技术及仪器国家重点实验室,天津300072)
编程器用来烧录芯片如 EPROM、EEPROM、Flash、MCU、PLD等,可以采用一台计算机带几台编程器的方式进行量产编程,可以提高工作效率和减少生产成本。全自动编程器通过机械喂料,视觉定位,将芯片准确的放到芯片槽上,实现无人操作自动化编程,是编程器生产的巨大飞跃,同时也是国家大力扶植的产业。
视觉定位是全自动编程器实现产业化中的难点和重点。机械喂料中的气吸和运动平台产生的机械摩擦,使得定位困难。具有鲁棒性的视觉定位算法[1-5]为系统实现的关键所在。方晓胜等[6]通过对BGA封装芯片进行定位,但是对TQFP,PLCC等封装并不适合,卢成静,黄桂平等[7]对圆的定位算法进行研究,比较和分析质心法和拟合法。邢德奎等[8]对镜头畸变进行了分析和补偿,[9-12]也提出了自己的算法。以上算法对不同封装芯片都没有提出通用性的视觉定位计算方法。我们通过对径向畸变不敏感的圆形靶标得到单目二维视觉测量的摄像机参数。通过种子自增长法提取目标,通过质心算法获得中心坐标,通过霍夫变换提取直线,获得旋转角度,保证视觉反馈控制的精确性。
1 单目二维视觉摄像机标定
如图1(a)所示,是实验中拍摄到的原始靶标图像。如图1(b)所示是经过中值滤波后的图像。可以看出,经过中值滤波后的图像质量得到了明显的改善。
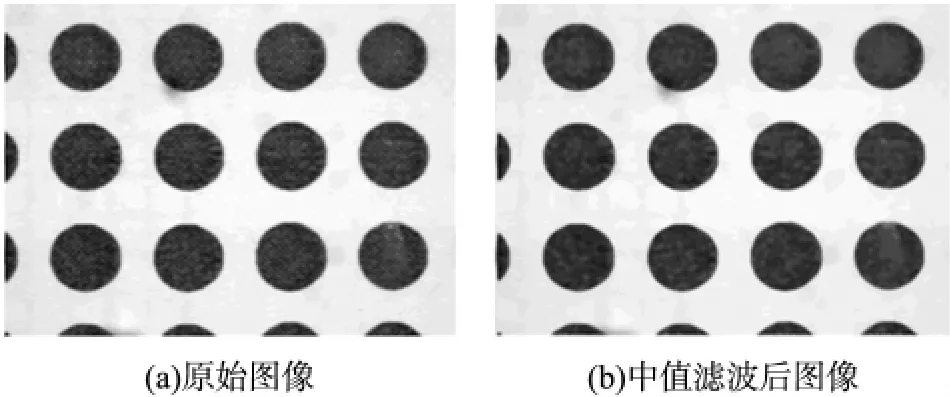
图1 原始图像和预处理图像
在采集的靶标图像中包含了12个完整的圆和7个残缺的圆,标定中需要确定12个完整圆的圆心用于线性拟合,而对于7个残缺的圆应该予以滤除,这个过程可以通过目标标记实现。目标标记是对二值化后的目标图像中的多个感兴趣区域采用不同的灰度值进行标记,选择合适的阈值(阈值大小通过实验数据判断一般为单个圆形像素总数大小的1/10)即可将较小的目标区域或噪声剔除。我们提出了改进的基于种子自增长法的目标标记方法:图2是种子自增长法的程序流程图。图3是经过目标标记后的图像,不同的灰度表示不同的目标对象。用重心算法计算被标记的12个对象的重心,即可进行下一步的线性拟合。
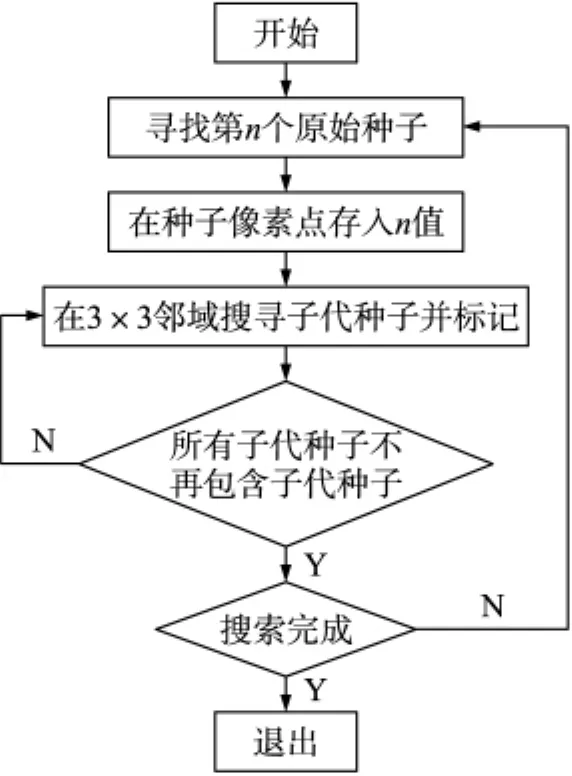
图2 种子自增长法流程图

图3 目标标记后的图象
如表1所示,是通过重心算法12个目标圆的圆心坐标和对应的物空间坐标。
设有n 组二维坐标点yi(yi0,yi1),xi(xi0,xi1),求最优矩阵使得取最小值,通过最小二乘法,最优解为

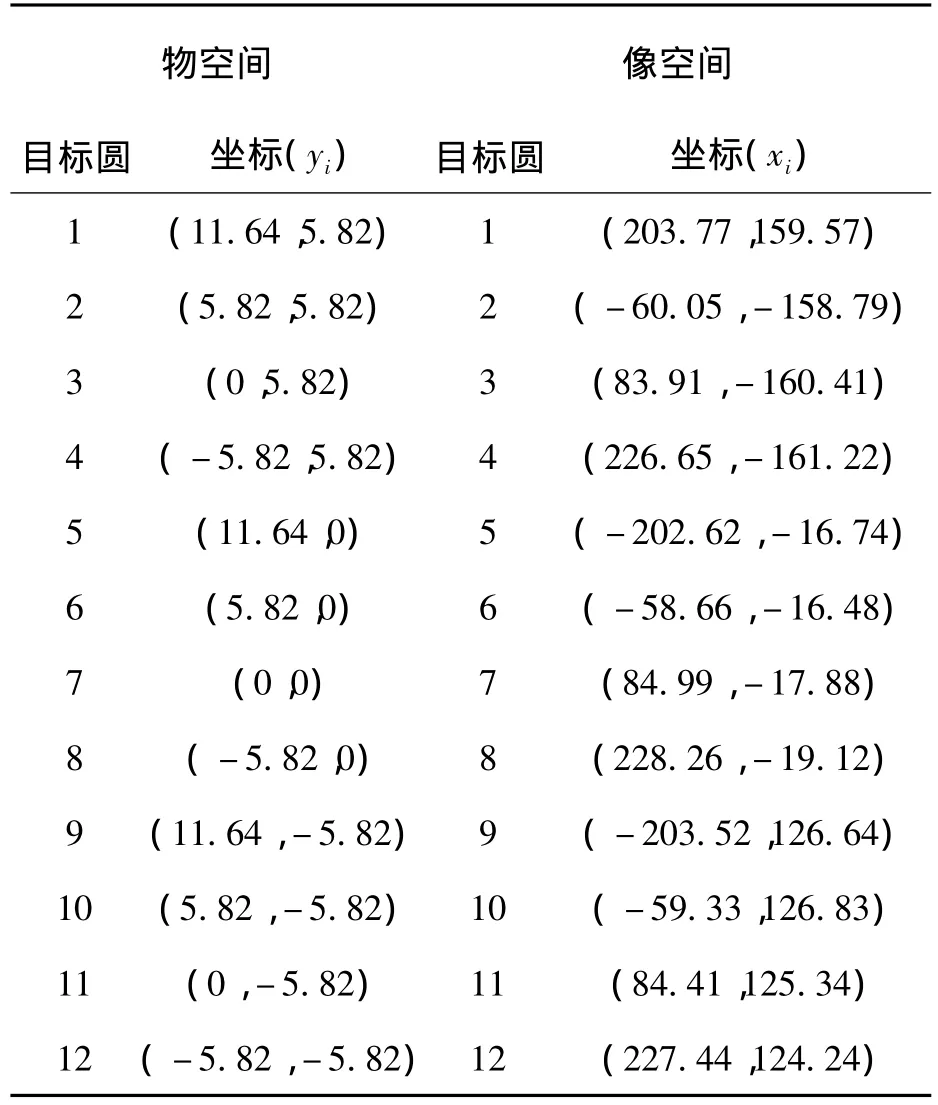
表1 标定点坐标实验测试数据
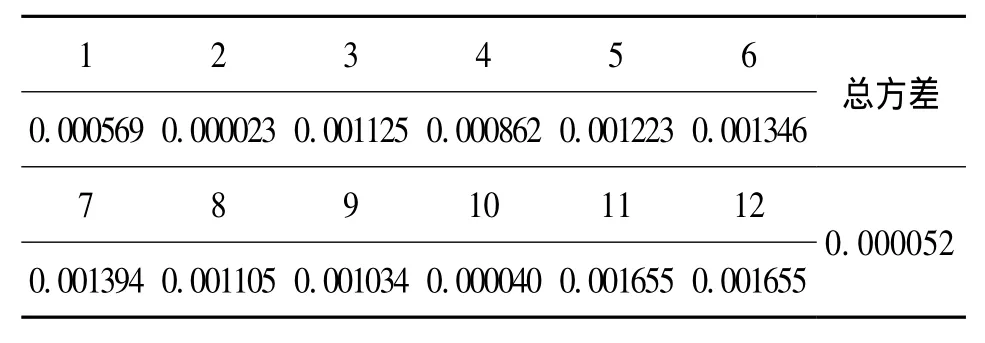
表2 线性拟合各点的误差
2 芯片定位算法研究
芯片定位需要计算的两个关键参数是中心坐标和旋转角度,图4是相机拍摄的芯片原始图像。由于芯片在图像中的目标较大,我们采用种子自增长法标记出目标芯片,还可以滤除一些图像预处理中无法除掉的大面积噪声或污渍。
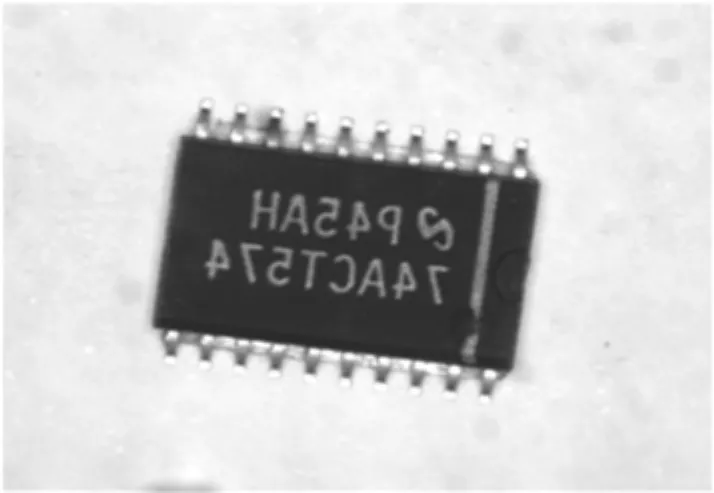
图4 原始目标图像
图5是经过中值滤波,二值化和种子自增长法目标标记之后的图像,印字的存在不便于后续的处理,需要消除目标中印字的影响。我们可以对背景和印字进行二次目标标记,选择合适的阈值,即可实现对印字的填充。经过二次目标标记后的图像,如图6所示。
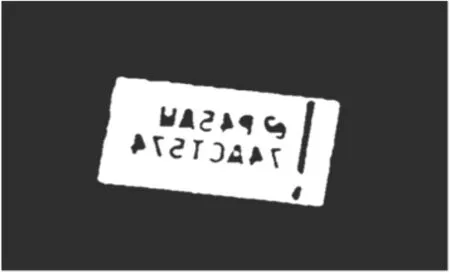
图5 处理后的图像

图6 二次目标标记后的图像
经过上述一系列图像处理后,接下来需要检测图像中白色矩形区域的中心和旋转角度。检测方法种类较多,以下将分别采用三种方法进行测量,并对检测的实验结果进行对比。
(1)霍夫变换法
通过霍夫变换检测目标区域中的四条边界线,计算边界线的角度即为芯片的旋转角度,同时根据边界线的四个交点可进一步计算出矩形区域的中心。如图7是经过霍夫变换后的图像,图中红条是经过标记后的直线。选择直线段中的最长线段,可以准确的计算出芯片的旋转角度,但如何从多条直线中准确的挑选出四条边界线是需要解决的问题,因此,霍夫变换不适合用于对中心的检测。
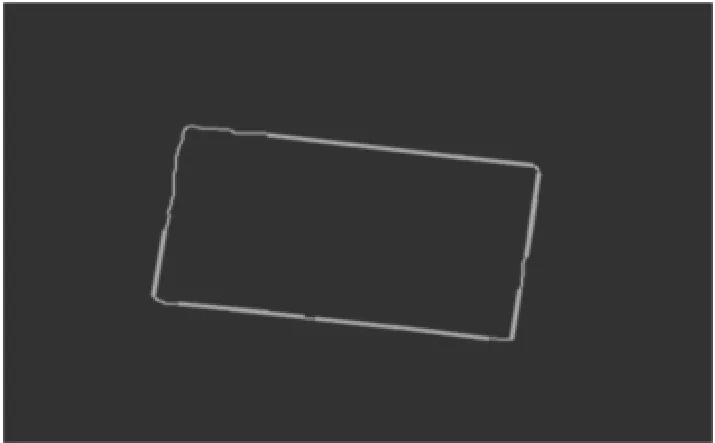
图7 霍夫变换后图像
(2)四点定位法
四点定位法是通过找到矩形的四个角点来计算出芯片的中心和旋转角度。对角点的定位可以通过行扫描和列扫描实现。首先,对图像从上向下进行行扫描,扫描到的第一个点作为矩形的第一个角点。然后对图像从下向上做同样的扫描,扫描得到的第一个点作为矩形的第四个角点。相同的方法进行列扫描,可依次得到剩下的两个点。为了避免在矩形的旋转角度较小时,行扫描和列扫描得到相同的点,对于扫描的方向需做一定的规定,如图8是扫描示意图。这种通过扫描的方法可以达到较快的速度,并能较为准确的得出中心和旋转角,但是当预处理得到的图像四个角比较圆滑时,会产生较大的误差。
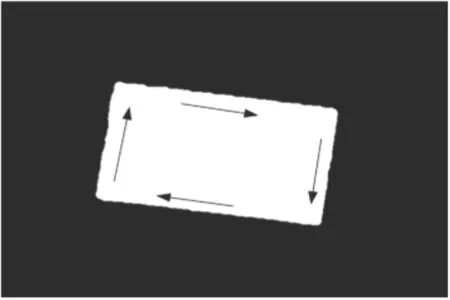
图8 四角点扫描示意图
(3)重心定位法
通过求解重心来定位矩形区域的中心是最直观简单的方法,而且能达到较快的速度和精度,但明显的缺点是无法计算芯片的旋转角度。
经过以上的分析对比可知,三种方法具有各自的特点,在实际中,我们可以选择其中的一种或多种组合。我们采用霍夫变换求角度和重心算法求中心相结合的方法。如表3所示,是通过三种方法对图4中的芯片求解得到的中心坐标和旋转角度。从表中可以看出,三种方法得到的结果相差较小,说明所选用的图像处理算法具有合理性。
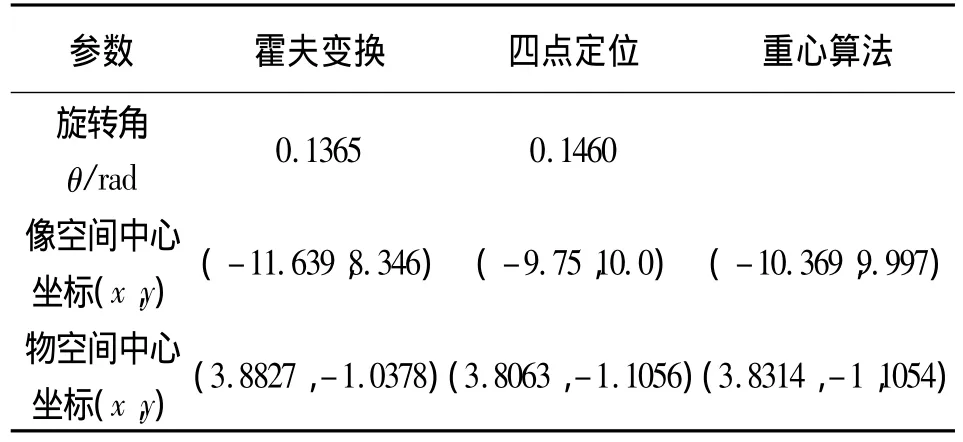
表3 三种方法求解的实验数据对比
3 实验
在实验室条件下搭建二维机械臂模拟系统。两根导轨通过正交的放置用于模拟物空间的x轴和y轴,其中一根导轨固定在另一根导轨之上,导轨的运动通过运动控制卡进行控制。需要定位的芯片被放置在两根导轨的交叉处。照明系统选用日本的CCS光源,并采用直射的方式照射在需要检测的芯片上。系统的工作流程如下:芯片随着导轨的运动进入相机视野后,通过相机进行定位,相机计算出芯片的坐标后,通过坐标变换转化为其在物空间的坐标,并计算出其与目标点之间的坐标偏差,计算的结果通过USB传递给上位机,上位机根据坐标偏差向两根导轨发出相应命令。导轨在运动控制卡的控制下运动到目标位置。
4 结论
文中结合自动编程器反馈控制的需要,对自动定位视觉算法进行了深入的研究。表明圆形靶标在单目二维视觉摄像机标定中具有很高的鲁棒性,通过霍夫变换,四点定位,重心算法对芯片实时定位进行比较研究,实验表明采用霍夫变换求角度和重心算法求中心相结合的方法可以实现定位。
[1]解杨敏,史航,刘强.高精度贴片机视觉定位系统的研究与设计[J].装备制造技术,2007,12:39 -41.
[2]汪宏昇,熊飞,史铁林.高速高精度的机器视觉定位的算法[J].光电工程,2005,32(9):71 -74.
[3]梁伟文,马如震.基于视觉定位的高精度多功能贴片机技术[J].机电工程技术,2005,34(3):86 -88.
[4]李建平,邹中升,王福亮.热超声倒装键合机视觉定位系统的设计与实现[J].电子技术应用,2006,6:12 -15.
[5]刘一凡.基于视觉定位的微小芯片插片机控制系统的研究[J]机床与液压,2008,36(11):94 -96.
[6]方晓胜,胡跃明,高红霞.BGA芯片的高速高精度视觉检测与定位算法[J].电子工艺技术,2006,27(5):262 -268.
[7]卢成静,黄桂平,李广云.视觉检测中圆形标志的定位方法研究[J].宇航计测技术,2008,28(2):5 -13.
[8]邢德奎,达飞鹏,张虎.圆形目标精密定位方法的研究与应用[J].仪器仪表学报,2009,30(12):2593 -2598.
[9]李君兰,张大卫,王以忠.面向IC封装的显微视觉定位系统[J].光学精密工程,2010,18(4):965 -970.
[10]袁鹏,胡跃明,刘海明.贴片机屏蔽罩视觉定位算法研究[J].计算机测量与控制,2009,17(6):1141 -1142.
[11]赵杰,高强,程万胜.基于单CCD视觉定位的BGA自动贴装系统设计[J].哈尔滨商业大学学报,2008,24(2):178 -181.
[12]张勇斌,卢荣胜,刘晨.一种视觉定位系统的标定新方法[J].电子质量,2003,8:9 -10.
