用于磁轴承位移检测的数字式电涡流位移传感器设计与实验研究*
2011-05-06庞喜浪
庞喜浪,刘 刚,文 通
(北京航空航天大学仪器科学与光电工程学院,北京100191)
飞轮是卫星姿态控制的关键执行机构之一,它通过控制转子的转速,即改变角动量的大小来产生所需的控制力矩,从而精确地控制空间飞行器的姿态[1]。控制力矩陀螺是长寿命大型航天器或敏捷航天器必不可少的姿态控制执行机构[2]。磁悬浮飞轮(MSFW)和磁悬浮控制力矩陀螺(MSCMG)都采用磁悬浮轴承支撑,与传统机械轴承飞轮相比具有长寿命、微振动、高精度等特点,是新一代航天器理想的高精度姿控执行机构。由于磁轴承的开环不稳定性,必须实时地对飞轮转子的悬浮位置进行闭环反馈控制,因此用于检测飞轮转子位置的位移传感器成为磁悬浮飞轮控制系统的核心部件。它用于检测电磁铁与转子间的气隙大小,其检测精度直接影响高速转子的稳定性与控制精度。实现对磁轴承定子与转子间气隙的高精度非接触测量是实现磁悬浮转子高精度稳定控制的关键技术之一[3]。
现有国内外磁轴承控制系统中已经采用的位移传感器主要有电容式、光纤式、差动电感式和电涡流式等[4]。但目前的这些应用于磁轴承控制系统的非接触测量位移传感器输出的信号多数是模拟信号。这样每个检测点都需要单独的信号线进行传输,尤其在磁悬浮控制力矩陀螺的应用中,所有高速转子的信号均应从导电滑环接出,导致系统体积、重量、复杂度增加,可靠性降低,抗干扰能力减弱,这不利于空间应用。
从整个磁轴承研究和应用领域来看,电涡流传感器应用最为广泛,但国内目前的磁轴承控制系统中几乎没有数字式电涡流位移传感器的成功应用实例。文献[6]介绍了一种在低速磁悬浮列车中应用的方案。不过它的应用环境与磁悬浮飞轮的应用环境存在很大区别。空间应用对磁轴承控制系统的体积、重量、功耗等都有严格要求。
按调制方式分,电涡流传感器可以分为调频式、调幅式和变频调幅式3种[5]。后两种直接输出的信号是模拟信号,而根据调频式的原理,可以直接利用数字电路提取频率信号,经过处理最后输出位移的数字信号。由于是直接输出数字信号,这样可以增强系统的抗干扰能力,而且各路可以共用信号线传输位移信号。相比模拟式传感器,减少了输出的信号线,增强了系统的可靠性,减少了复杂度。
1 基本测量原理及方案设计
电涡流式传感器的基本原理[5]是电涡流效应——利用传感器线圈产生交变磁场,使被测导体表面产生电涡流,从而改变线圈电参数而制成的一种测量装置。电涡流的产生必然要消耗一部份能量,从而使产生磁场的线圈阻抗发生变化。根据此涡流效应而制成的传感器,称之为电涡流传感器。
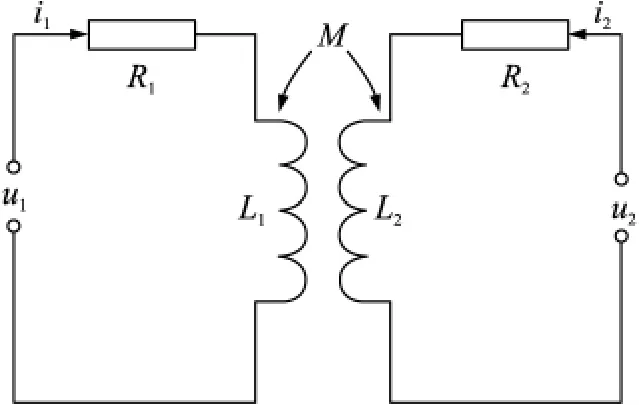
图1 探头耦合简化原理图
图中R1、L1为传感器探头线圈的电阻和电感,R2、L2为被测导体的电阻和电感,ω为线圈激励电流的角频率,rad/s。探头线圈和导体之间存在一个互感M,它随线圈与导体间距离的减小而增大。根据基尔霍夫电压平衡方程式,可求出传感器探头线圈的等效阻抗为[1,3]:

从而得到探头线圈等效电阻和电感分别为式(2)所示。
探头线圈和导体之间存在的互感M,它随线圈与导体间距离的减小而增大。所以当位移发生变化时,电感L会发生变化。将线圈电感L作为振荡电路的一部分,在电容不变的情况下,谐振频率f将是x的单值函数,即f=φ(x)。利用这一特性,可做成调频式电涡流位移传感器。
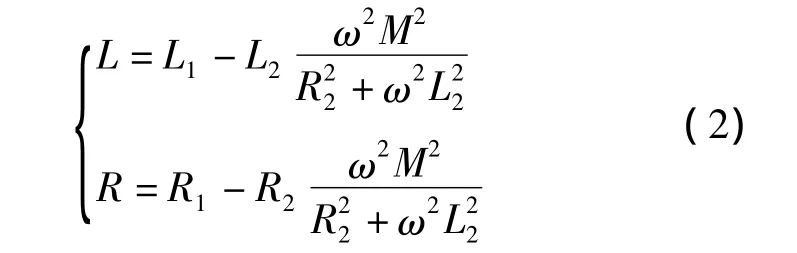
具体设计方案如图 2[6]:
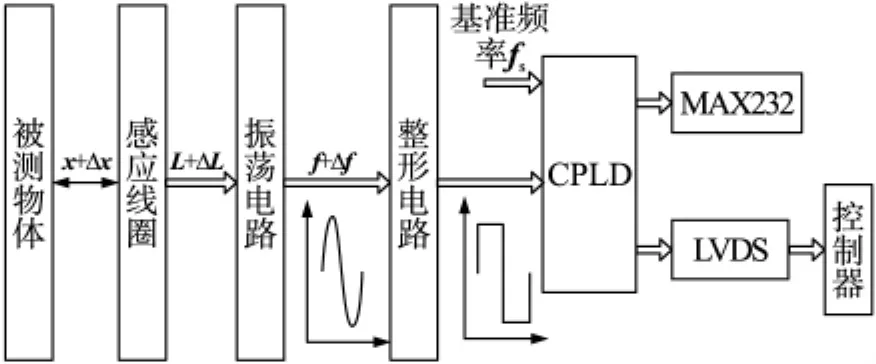
图2 基于CPLD的电涡流位移传感器结构框图
如上图所示,当感应线圈和被检测面之间的距离x变化时,感应线圈的电感会发生ΔL的变化。由于感应线圈是振荡电路的一部分,所以电感的变化会通过振荡电路的谐振频率f的变化表现出来,即谐振频率f会有对应的Δf的变化量。将含有频率信息的振荡正弦波信号整形成方波信号后,就可以通过CPLD来间接测量位移变化了。
2 振荡和整形电路
电涡流传感器的调频电路的基本组成部分是一个电容三点式振荡电路[3],传感器的探头线圈接在此振荡回路中,当被测体与探头线圈之间的距离改变时,由于探头线圈等效电感值的变化,回路的振荡频率f会随之发生变化。而频率信号经整形成数字信号后,可通过CPLD电路测算出来。
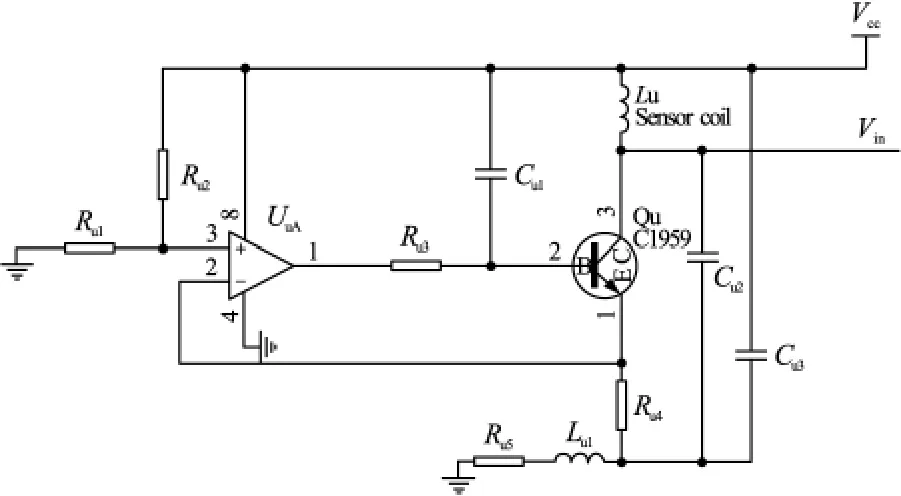
图3 电容三点式振荡电路
如上图,即L u为探头线圈,它作为电感接入振荡电路。Vin就是振荡电路产生的信号,它是以Vcc为平均值上下波动的正弦波,频率为[7]:
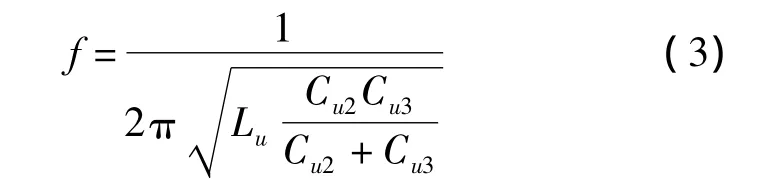
对此信号整形可用比较器与Vcc信号进行比较来实现。输入信号Vin,即待比较电压,它加到同相输入端,在反相输入端接一个参考电压(门限电平)Vcc。当输入电压Vin>Vcc时,输出为高电平8 V。当输入电压Vin<Vcc时,输出为低电平0。输出信号再经过74HC14反相处理成适合CPLD读取的数字信号。
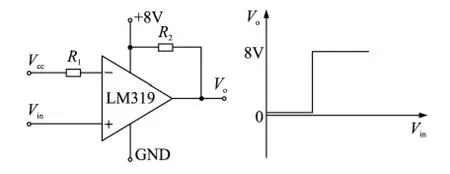
图4 比较器整形
3 测频的原理
现在实际中应用的测频方法主要有两种[8-9]:①直接测频法;②等精度测频原理。
直接频率测量包括测频法和测周期法。测频法就是在确定的闸门时间TW内,记录被测信号的变化周期数(或脉冲个数)NX,则被测信号的频率fx=NX/TW。测周期法需要有标准频率信号fS,在待测信号的一个周期内,记录标准频率的周期数NS,则被测信号的频率为fx=fS/NS。这两种方法的计数值都会产生±1误差,并且测量精度与计数器中记录的数值有关。为了保证测量精度,一般对低频信号采用测周期法,对于高频信号采用测频法,因此测试时很不方便。其相对误差公式为:

等精度频率测量是通过同步电路使闸门信号与被测信号同步,在测量过程中,有两个计数器分别对标准和被测信号同时计数。如图5所示,首先给出闸门开启信号(预置闸门上升沿),此时计数器并不开始计数,是等到被测信号的上升沿到来时,计数器才真正开始计数。然后预置闸门关闭信号(下降沿)到时,计数器并不立即停止计数,而是等到被测信号的上升沿到来才结束计数,完成一次测量过程。可以看出,实际闸门时间t与预置闸门时间tI不严格相等,但差值不会超过被测信号的一个周期。
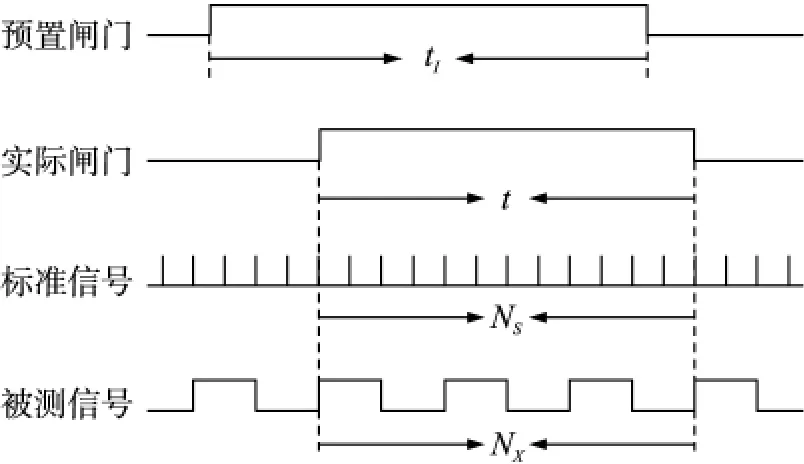
图5 等精度测频原理波形图
设在一次实际闸门时间t中计数器对被测信号的计数值为NX,对标准信号的计数值为NS,标准信号其测量误差公式

其中fx为被测信号频率,tI为预置闸门时间,fS为标准频率。其测量误差包括对标准信号的计数误差和标准频率误差,由(5)式可以得到如下结论:被测信号频率的测量精度主要取决于标准频率和闸门时间,而与被测信号频率大小无关.所以等精度频率测量克服了直接频率测量时被测信号的±1计数误差,在整个频率测量范围内都能达到相同闸门时间的相对最高测量精度,但是等精度频率测量仍然存在对标准频率的±1误差。
由上分析可知,等精度频率测量原理要优于直接测频法,所以本方案采用等精度测频原理。
4 CPLD实现的功能
模拟式的电涡流位移传感器一般是将代表位移的模拟电压信号直接传输给磁轴承控制系统的AD采样模块,经过AD采样后再将信号传输给磁轴承的数字控制系统。由于模拟信号在传输过程中容易受到其他信号的干扰,所以一般抗干扰能力较弱。而数字式电涡流位移传感器则由于传输的信号直接就是数字信号,所以大大提高了系统的抗干扰能力。
在数字式电涡流位移传感器中,CPLD模块实现的主要功能包括两个方面:①测频功能;②将测量的频率换算成对应的位移x。由上一节可知,等精度测频是通过闸门时间内的NS、NX来间接测量频率fx,则CPLD完成的功能流程如图6。
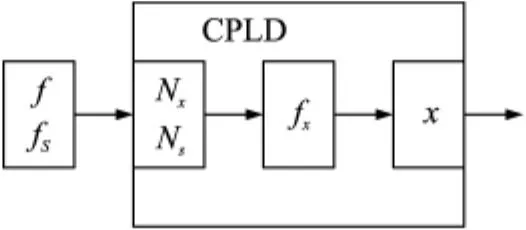
图6 CPLD模块功能流程图
经过比较器和反相器处理后的代表位移的频率信号f与晶振信号fS作为输入信号输入到CPLD。CPLD在闸门时间内得到被测信号的计数值NX和标准信号的计数值NS,编写VHDL程序完成fx=NX·fS/NS的运算后可求得fx。再将fx代入由标定得到的频率-位移关系函数f-1(x)最后求得位移x并输出。
由于采样速率比较高,VHDL在进行这些运算时需要实现高速、高精度。而VHDL本身没有除法模块,普通的直接通过减法来实现除法的方法不能满足要求。采用移位减法的方法能够很好的满足要求[10]。
由运算求得的频率fx与实际频率f之间存在一定误差。根据上一节的分析可知等精度频率测量的误差主要在于对标准信号的±1计数误差,而且这个相对误差主要由闸门时间和标准频率决定的。在8 kHz的采样频率和40 MHz的基准频率下,实际闸门时间 t<125 μs,相对误差若 fx=1.6 MHz,绝对误差(Δfx(≈1.6 MHz×0.02%=320 Hz。显然,降低采样频率和提高标准频率均能减少测频误差。
分辨率是指使测量仪表产生未察觉响应变化的最大激励变化值。如用等精度频率测量原理来测量频率,由于fx·Ns=fs·Nx,则它的分辨率就是指未能使NS和NX发生计数变化的最大fx变化值。NS与NX相比,对fx的变化更加敏感,所以等精度测频原理的测频分辨率为。若采样频率为8 kHz,基准频率为40 MHz,被测频率fx=1.6 MHz,则它的分辨率约为320 Hz。
5 实验结果
磁悬浮飞轮对位移信号的采样速率要求比较高,在此按8 k的采样速率设计。探头线圈内径为5 mm,外径为9 mm,电感大小为 22.6 μH。CPLD 系统采用40 MHz的晶振。在静态标定仪上,对该传感器进行了标定。
图7 静态标定仪标定实验图
如图8所示,传感器通过串口,将从0~3.5 mm之间每增加0.1 mm时测到的频率值上传到PC机,得到以下位移与频率的关系图。
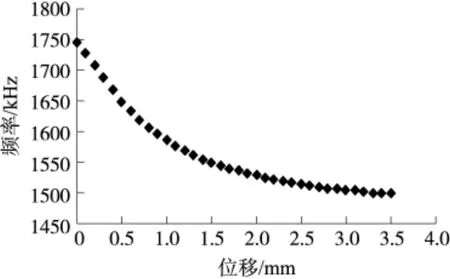
图8 频率—位移实测关系图
其中,在0 ~1.5 mm 灵敏度比较高,0 ~0.8 mm这一段灵敏度为 172.65 kHz/mm,0.8 ~1.5 mm 这一段灵敏度为81.42 kHz/mm,而0~1.5 mm 的平均灵敏度是130.05 kHz/mm。对这一段的频率—位移关系以最小二乘法进行曲线拟合[9]。图9是分别采用线性拟合、分段线性拟合(分成两段)、二次多项式拟合三种方法进行拟合得到的对比图。[11-12]

图9 三种曲线拟合对比
由上图明显可以看出,线性拟合的效果最差,不仅误差最大,而且线性度也不高。而分段线性拟合与二次多项式拟合效果差不多,从图中不能明显区分。但经计算对比它们的线性度,在此应用中分段线性拟合的拟合效果优于二次多项式拟合,而且分段线性拟合便于CPLD编程,占用运算资源少。如果资源允许,还可以将测量范围分成三段甚至更多段进行拟合,这样将会达到更好的拟合效果,取得更高的线性度。图10是分段线性拟合的拟合曲线,图11是其拟合后的线性化效果。
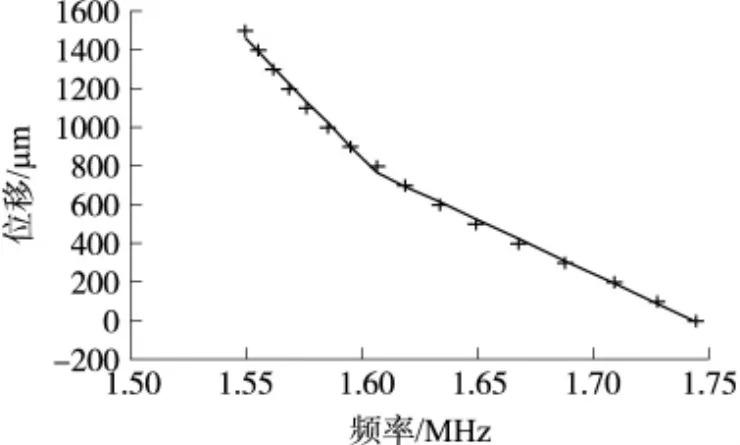
图10 分段线性拟合
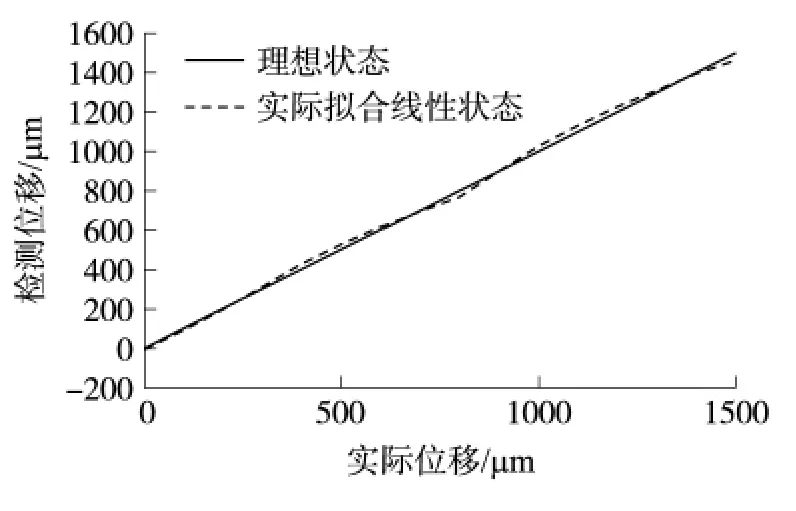
图11 分段线性拟合的线性效果
6 结论
本传感器经过静态标定后,在CPLD中写入频率-位移关系函数f-1(x)的参数即可,无需在标定的同时调节静态工作点、偏置和放大倍数等参数,大大简化了调试过程。相对普通的模拟式电涡流传感器,它直接传输数字信号,具有更好的抗干扰性。与此同时,它不需要AD采样,这样更便于数字化集成。而且测量范围可以通过扩大拟合范围来扩大,便于扩大量程。如果条件允许,还可以通过提高基准频率(提高晶振频率或对晶振频率进行倍频)和降低采样频率来提高分辨率。该传感器采用40 MHz的基准频率,采样频率为8 kHz,测量范围为0~1.5 mm。在测量范围内,灵敏度最低的地方分辨率<3 μm,平均灵敏度为81.42 kHz/mm。本方案设计的数字式电涡流位移传感器可根据磁悬浮飞轮的实际要求进行微调。它直接输出数字信号,无须每个检测点都通过一条信号线输出信号,减少了系统的复杂度,增强了抗干扰能力。
[1]刘虎,房建成,刘刚.基于磁悬浮动量轮微框架能力的卫星滚动-偏航姿态稳定控制研究[J].宇航学报,2010,31(4):1-7.
[2]魏彤,房建成,刘珠荣.双框架磁悬浮控制力矩陀螺动框架效应补偿方法[J].机械工程学报,2010,46(2):159 -165.
[3]Evaluation and Improvement of Eddy Current Position Sensors In Magnetically Suspended Flywheel Systems[R].NASA Glenn Research Center,2001.
[4]张倩.磁悬浮飞轮用电涡流位移传感器特性分析与研究[D].北京航空航天大学,2007.
[5]谭祖根,汪乐宇.电涡流检测技术[M].北京:原子能出版社,1986:49-57.
[6]李中秀,吴峻,李璐,等.基于FPGA的调频式电涡流位移传感器[J].仪表技术与传感器,2007,7:7 -9.
[7]王志强,刘刚,李红.磁轴承用电涡流位移传感器串扰产生及抑制方法研究[J].仪器仪表学报,2010,31(5):1035 -1040.
[8]曾任贤.基于FPGA的等精度数字频率计的研究与实现[J].科技广场,2009.5:238 -239.
[9]向诚,夏国荣,桂玲.基于单片机和FPGA的高速测频系统的开发[J].微计算机信息,2007,23(4-2):238 -240.
[10]Adamec L F,Fryza L T,Ph D.Binary Division Algotithm and Implementation in VHDL[C]//19th International Conference on Radioelektronika,2009.
[11]于鹏,许媛媛.利用插值法和线性拟合法标定电涡流传感器[J].中国测试技术,2007,33(1):139 -141.
[12]唐炜,顾金凤.数字式涡流传感器的研究[J].传感器技术,2001,20(8):16 -18.
