架控制动系统及其在城轨车辆上的应用
2011-05-04王群伟林祜亭王新海韩晓辉
王群伟,林祜亭,王新海,韩晓辉
(中国铁道科学研究院 机车车辆研究所,北京100081)
架控制动系统是以每个转向架为单位来设置制动控制单元的制动控制方式。和传统的车控方式相比,它是一种分散式的控制方式。架控制动系统把常用(SB)制动、紧急(EB)制动、防滑控制(WSP)以及制动管理电子设备等集成到一个单元内;单元就近安装在转向架附件,以转向架为单元对每转向架实施制动控制。
1 架控制动系统的组成和结构
架控制动系统的典型的气动原理图见图1。该图为一辆拖车(Tc)的气路原理图。系统中包括辅助控制模块、制动控制单元、轮盘制动单元以及空气弹簧等。
1.1 辅助控制模块
辅助控制模块是架控制动系统的重要组成部分。该单元把从总风管过来的压缩空气分配到制动风缸、停放制动、空气弹簧等部位,为制动系统提供了辅助控制功能。
(1)给制动控制单元供风
来自总风管的压缩空气经过一个过滤器B1.03和单向阀B1.04进入制动风缸R3。制动风缸R3给制动控制提供快速和充足的压缩空气。塞门B1.05用以维修时切断风源;同时可以隔离停放和整个制动控制。
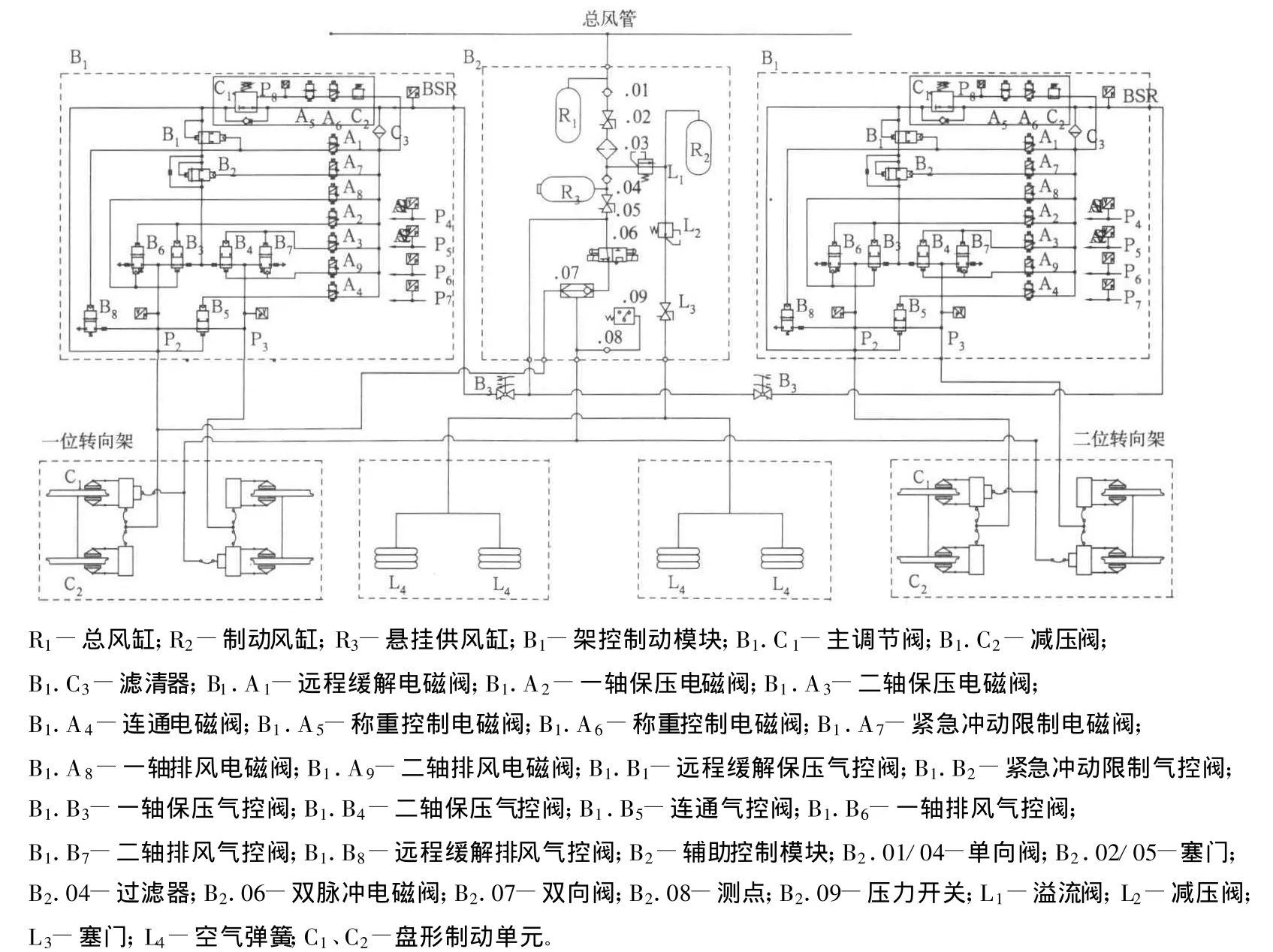
图1 架控制动系统气动原理图
(2)实施停放制动控制
停放的功能由双脉冲电磁阀B1.06和双向阀B1.07来实现。压力开关B1.09用以制动控制单元对停放制动的状态实施监控。
(3)对空气弹簧实施供风
每辆车总风管的空气通过溢流阀B1、L1进入空气悬挂风缸R2;并可通过一个隔离塞门L3对空气弹簧供风实施切断。
1.2 制动控制单元
制动控制单元是系统控制的核心,是一个电子控制设备和气动执行部件高度集成的单元。每辆车有两个制动控制单元,分别控制一个转向架的基础制动装置。其可分为如下功能模块:
(1)空重车调整模块:包括 C1、C2、A5、A6和 P8。
减压阀C2按重车的紧急制动缸压力设定输出值。称重控制电磁阀A6和A5输出为实际车重的紧急制动缸压力。P8为压力传感器和压力测点,用于测量调整后的压力。主调节阀C1最小(即无电子称重压力输入)输出为空车紧急制动缸压力。正常输出根据电子称重压力输入调整。
(2)远程缓解模块:包括A1、B1、B8。
紧急缓解时电磁阀A1得电,阀B1和B8动作,在切断主调节阀输入压力的同时,排出制动缸的压力空气。
(3)紧急冲动限制模块:包括A7和B2。
常用制动时,电磁阀A7得电,B2阀打开,使压缩空气不受限制的进入制动控制回路;紧急制动时,电磁阀A7失电,B2阀关闭,使压缩空气经限流后进入制动控制回路,从而具有冲动限制功能。
(4)制动控制模块
该模块有相同的两组,分别为A8,A2,B6,B3和A3,A9,B4,B7。这两组阀的功能全部相同,都是根据不同的制动级别,产生相应的制动缸压力。正常情况下,两组模块按设定程序交替使用。下面以一组阐述。
充风时,电磁阀A8,A2失电。阀 B6关闭,阀B3打开,向制动缸充风;
排风时,电磁阀A8,A2得电。阀 B6打开,阀B3关闭,制动缸的风经B6排出;
保压时,电磁阀A2得电,电磁阀A8失电。阀B6和B3关闭,制动缸处于保压状态;
(5)连通模块:包括 A4和B5
正常状态下,电磁阀A4失电,阀 B5处于连通状态,制动时,制动控制模块产生的制动缸压力同时进入同一转向架的两根轴,即正常状态下,制动方式采用架控方式。当产生滑行时,电磁阀A4得电,阀B5关闭,两组制动控制模块分别对每根轴进行控制。
(6)传感器和压力测点模块:包括P1,P2,P3,P4,P5,P6,P7和P8
压力传感器用于对制动风缸压力、空气弹簧压力、制动缸输出压力、停放制动缸压力进行检测;压力测点提供了必要的测试接口。
2 架控制动系统的控制方式
架控制动控制系统采用基于CAN总线的分布式控制方案,每个转向架都有一个独立的制动控制单元(BCU)用于控制本转向架的制动力,每辆车有两套BCU。架控制动控制系统的典型网络结构如图 2所示,将3个BCU(3辆车)作为一个控制网段,一个网段上的BCU可以通过制动系统CAN总线进行通信。
在每个网段上有两个控制单元具有网关的功能,称之为制动控制网关单元(GBCU),只有本转向架制动控制功能而没有网关的功能的BCU称之为本地制动控制单元或智能制动控制单元(SBCU)。GBCU不仅具有与列车网络控制系统(TCMS)的通信接口(MVB或其他网络型式),同时还能够接收列车控制线的指令。GBCU通过车辆总线和列车控制线接收制动指令和电制动信息,并要计算出本单元中各个转向架上应施加的空气制动力,然后通过制动CAN总线传送给本网段上的各转向架的SBCU。通常情况下,一个单元内的GBCU只有一个工作在网关模式,另一为作为备用网关,只进行本地控制,相当于一个SBCU。
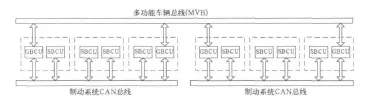
图2 架控制动系统的网络接口方式
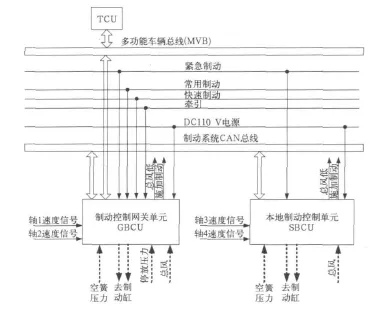
图3 一辆车的制动系统电气接口(GBCU+SBCU)
配有GBCU和SBCU的一辆车的制动系统电气接口如图3所示。每GBCU和SBCU都有紧急制动的控制输入和2路速度传感器接口。常用制动是通过制动CAN总线来控制的,但紧急制动不采用CAN总线控制,而是由紧急制动列车线直接控制每个转向架的BCU。
3 架控制动系统的功能
3.1 常用制动控制
常用制动时连通阀电磁阀A4失电,使同一转向架上2根轴上的制动缸气路被连通,产生相同的制动缸压力。在调节制动缸压力时,可以由其中任一轴的保压/排风电磁阀(A3/A6或A4/A7)来控制,另一个轴的保压/排风电磁阀始终工作在保压状态。
BCU根据实际制动缸压力的反馈信号实施对保压/排风电磁阀的控制来实现制动缸压力的闭环控制。当实际制动缸压力低于制动缸压力设定值时,保压/排风电磁阀组为充风组合(均不通电),对制动缸进行充风使其压力上升;当实际制动缸压力高于制动缸压力设定值时,保压/排风电磁阀组为排风组合(均通电),对制动缸进行排风使其压力下降。
3.2 制动防滑控制
根据两个轴的速度与列车速度差以及两个轴减速度来检测制动滑行,列车速度是根据一个CAN网段上各轴的速度综合计算的。防滑程序采用以下两种方式来检测滑行:
(1)单个轴的减速度过大;
(2)单个轴的速度与列车速度相差过大
当检测到有制动滑行时,连通阀电磁阀A4通电来切断两根轴制动缸压力的连通,使每根轴的制动缸压力能独立控制,对于发生制动滑行的车轴,通过对保压/排风电磁阀的通电排风来减小滑行轴上的制动力,使滑行轴的速度能尽快恢复。
3.3 紧急制动控制
制动系统得到紧急制动信号时,BCU会把紧急制动的施加信号发给相应的电子控制板,控制板收到紧急制动的施加指令后,控制2根轴上的制动缸压力控制电磁阀使它们都处于失电状态,使制动缸压力达到称重的紧急制动压力水平。
4 应用
自广州地铁3号线车辆(2005年2月交付使用)首次采用EP2002制动控制系统以来,全国许多城市轨道交通线路车辆采购项目上都采用了分散式架控制动控制系统,部分城市线路的应用见表1。
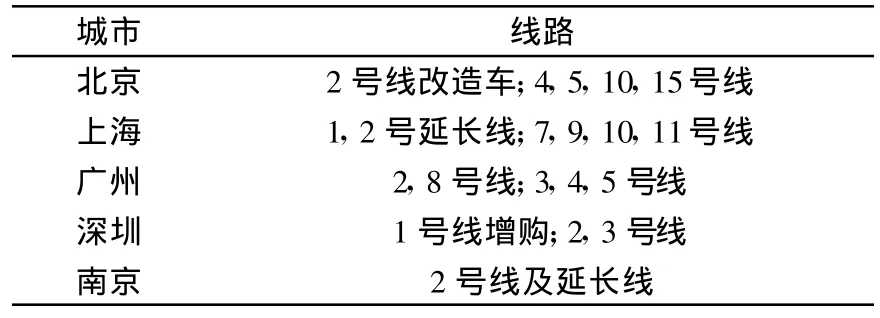
表1 架控制动控制系统在国内城轨车上的应用
5 结束语
对模拟式电空制动控制系统来说,架控制动控制系统的集成程度更高;在单个功能故障的情况下,制动控制功能仅丧失为单个转向架;模块内部集成了制动控制和防滑控制功能;取消了机械称重阀,简化了结构,既能限制紧急制动最高压力,又可保证最小的空车压力。架控制动系统在国内城市轨道交通车辆上得到了大量的应用。
目前的架控制动单元由于电气和机械部件混装,出现故障时必须整体更换,给维修和维护带来不便,检修成本高。针对目前的状况以及架控制动系统的特点,可以采用模块化设计的方法对系统中的辅助控制模块和制动控制单元进行设计和开发。
根据架控制动系统的特点,利于模块化设计的方法,对其中的辅助控制模块和制动控制单元进行模块化设计。辅助控制模块可以利于集成板技术进行阀类的集成实现模块化;制动控制单元的气动部分和电气板卡部分可以分成两个模块,气动模块和电气模块可以单独实现内部部件的拆装,方便维护和使用。
