电动车组交流传动系统的硬件在回路实时仿真研究*
2011-05-04马志文崔恒斌
马志文,李 伟,崔恒斌,韩 坤
(1 中国铁道科学研究院机车车辆研究所,北京100081;2 西南交通大学 电气工程学院,四川成都610031)
在研制电动车组大功率交流传动系统的过程中,必须对日趋复杂的牵引控制装置进行充分的测试验证和参数整定,并排除实时软件在编程、中断、接口及通讯等方面的错误。如果没有完全消除牵引控制实时软件存在的隐患,就采用实际交流传动系统进行闭环联调试验是非常危险的。
以某型动车组的交流传动系统为例,引入硬件在回路实时仿真技术[1,2],即将交流传动系统主回路代之以实时仿真模型,并与实际的牵引控制装置相连构成硬件在回路(Hardware-in-the-loop,简称HIL)闭环仿真测试系统,以实现对牵引控制装置的实时仿真测试与验证。论述了基于MATLAB/SIMULINK软件的交流传动系统主回路仿真模型,介绍了基于dSPACE实时仿真器的HIL仿真测试系统结构,并给出了实时仿真测试的结果。
1 交流传动系统仿真模型
图1是某型电动车组交流传动系统的结构示意图,它主要由接触网(单相25 kV/50 Hz)、牵引变压器、四象限变流器(两重化结构)、中间直流回路、PWM 逆变器、牵引电机(4台并联)及牵引控制装置等部分组成。

图1 某型电动车组交流传动系统结构示意图
从系统级仿真角度考虑,建立图1所示交流传动系统的仿真模型,不仅要实现电动车组交流传动系统各种运行工况的模拟,而且还要满足硬件在回路仿真的实时性要求。在进行硬件在回路仿真测试时,需要对实际控制器输出的控制信号进行采样,必然造成仿真器的输入滞后于实际控制器的输出,而且延迟时间是随机的,最大的延迟时间等于仿真时间步长。为了抑制采样延迟对仿真计算精度的影响,应该控制仿真器的时间步长远小于控制器的控制周期[3]。
仿真建模时,按照模块化建模原则,对于牵引变压器、四象限变流器、中间直流回路、PWM 逆变器、牵引电机等主要部件,建立各自合适的简化数学模型,以此为基础,采用SIMULINK模块与高效率C-MEX语言编写的S函数相结合的建模方法构造整个交流传动系统的仿真模型[4,5]。
1.1 牵引变压器模型
忽略磁滞损耗、磁链饱和等因素影响,同时不计短路阻抗(放于四象限变流器模型中考虑),建立如下牵引变压器数学模型:

1.2 四象限变流器模型
建立四象限变流器模型时,将IGBT开关器件简化为理想开关(忽略开关时间、导通压降、开关损耗等因素的影响),并考虑反并联二极管的作用。牵引变压器短路阻抗(即漏电感)及预充电电路模型一并在四象限变流器模型中考虑。
四象限变流器的主电路如图2所示,由牵引变压器漏电感Ls、漏电阻 Rs、线路开关 SK、预充电电阻RP、预充电开关SP和2个开关桥臂组成,其中每个桥臂包含2个IGBT开关器件,并且每个IGBT与1个二极管反向并联。

图2 四象限变流器主电路图
为了便于分析说明,首先定义2个开关函数如下:

当四象限变流器不受脉冲控制时,4个IGBT器件都处于封锁状态,此时相当于一个单相桥式不控整流器。此时开关函数如表1所示。当电流is=0时,如果单相交流电压uab的绝对值|uab|大于直流电压Ud时,不控整流器启动;否则不启动。当电流is≠0时,说明不控整流器已经启动,可通过电流is的流动方向来判断两个桥臂二极管的通断。实际仿真建模中,通常设定一个很小的容差ΔIs(≈0)对电流is进行零点判断。

表1 四象限变流器开关表
当四象限变流器受脉冲控制时,a、b相的通断由四路IGBT 脉冲 P1、P2、P3、P4决定,此时开关函数如式(4)所示。


根据交流电压uab,按式(6)微分方程可以计算出四象限变流器的交流输入电流is。式(6)中,KP代表预充电开关SP状态,当SP接通(线路开关SK必断开)时,KP=1;否则KP=0。

根据交流输入电流is,可以得出直流输出电流id如式(7)所示。

1.3 中间直流回路模型
中间直流回路如图3所示,它包括串联谐振电路Lf,Cf和支撑电容Cd等部分。

图3 中间直流回路的电路图
图3所示电路的数学模型可以描述为:

1.4 PWM逆变器模型
PWM逆变器的主电路拓扑结构如图4所示,它由3个开关桥臂组成,其中每个桥臂包含2个IGBT开关器件,并且每个IGBT与1个二极管反向并联。n是逆变器三相负载的中性点。
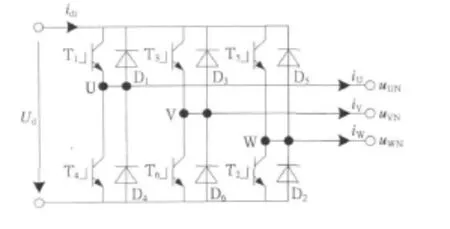
图4 PWM逆变器电路拓扑结构
建立模型时,将IGBT开关器件简化为理想开关(忽略开关时间、导通压降等因素的影响),并考虑反并联二极管的作用。为了便于分析,定义开关函数(x=U,V,W):

每个时刻三相桥臂均有一个开关器件处于导通状态,且同一桥臂两开关器件不能同时导通,否则会造成贯穿短路故障。由此得出PWM逆变器的数学模型,如式(10)所示:

1.5 牵引电机模型
建立三相异步牵引电机数学模型时,忽略空间谐波,设三相绕组对称,所产生的磁动势沿气隙圆周按正弦规律分布;忽略磁路饱和,各绕组的自感和互感都是恒定的;忽略铁芯损耗;并且不考虑频率和温度变化对绕组电阻的影响。
异步电机在两相静止坐标系(α-β)上的数学模型可以描述为式(11)~式(16)。

式中 usα,usβ为定子电压 α,β 轴分量;isα,isβ为定子电流α,β轴分量;ψrα,ψrβ为转子磁链 α,β轴分量;ω为电机旋转角频率;Te为电磁转矩;TL为负载转矩;p为微分算子,Rr为定子、转子电阻;Ls,Lr为定子、转子自感;为激磁电感;σ=1-/LsLr,为漏磁系数;Tr=Lr/Rr为转子时间常数为电机极对数;J为转动惯量。
电机在两相静止坐标系下的电压 usα,usβ,由三相电压uUN,uVN,uWN经3相/2相变换(按照等效电机原则)得到式(17)。


电机负载转矩TL,由列车阻力R按照式(19)折算公式得出。

式中Di为动轮直径;n为整列车配置的牵引电机台数;ηc为齿轮传动效率;μc为齿轮传动比。
2 硬件在回路仿真测试系统构成
基于"实际控制器+虚拟被控对象"模式,建立电动车组交流传动系统的硬件在回路实时仿真测试系统,如图5所示。它主要由dSPACE实时仿真器、牵引控制装置、接口箱、IO模拟操作面板、MVB网络模拟器及工控机等部分组成。

图5 硬件在回路仿真测试系统结构示意图
牵引控制装置为电动车组的实际牵引控制器,是主要的仿真测试对象。dSPACE实时仿真器和IO模拟操作面板一起用于模拟与牵引控制装置相关联的外部环境(包括交流传动系统主回路、二进制开关量、传感器模拟量等,但不包括MVB通讯网络)。接口箱用于实现牵引控制装置与dSPACE仿真器之间的信号连接、调理及转换。MVB网络模拟器用于模拟牵引控制装置的MVB网络环境。工控机内安装有 MATLAB软件及dSPACE相关软件,用于实现SIMULINK仿真建模、程序下载及调试监控人机界面;还安装有牵引控制装置的监控服务软件,用于实现牵引控制装置的调试及故障诊断等功能。dSPACE仿真器的具体配置情况如图6所示。
为了缩短仿真时间步长,dSPACE仿真器采用双CPU结构,主CPU用于网侧子系统(包括接触网、牵引变压器、四象限变流器等)仿真模型的计算,从CPU用于电机侧子系统(包括中间直流回路、PWM 逆变器、牵引电机等)仿真模型的计算,两CPU之间传递的数据仅为直流侧电压和电流。通过双CPU结构的使用,仿真器的时间步长最短可设置为50 μ s。CPU为DS1006处理器板卡,它采用主频3.0 GHz的AMD OpteronTM微处理器,计算功能强大。两个DS1006板卡各配置一个DS911光纤通讯模块,它们之间通过光纤以1.25 Gb/s的速率进行数据交换。

图6 dSPACE仿真器配置示意图
牵引控制装置的主要硬件接口信号由dSPACE实时仿真器的IO板卡来模拟,其中控制脉冲信号PWM由DS5001数字波形捕获板卡来模拟,数字输入信号DI与数字输出信号DO由DS4003数字I/O板卡来模拟,电压或电流传感器信号AO由DS2102 D/A板卡来模拟,速度传感器信号Enc由DS5101数字波形输出板卡来模拟。IO板卡与DS1006处理器板卡之间通过PHS总线以20 Mb/s的速率进行数据通讯。牵引控制装置的其余部分硬件接口信号由IO模拟操作面板来模拟,它上面配置有模拟温度或压力传感器信号的电位器、模拟二进制输入信号的开关及模拟二进制输出信号的指示灯。
dSPACE配置有功能强大、界面友好、基于 Windows操作系统的软件环境,支持基于MAT LAB/SIMULINK离线仿真软件的仿真建模,采用RTI实时接口软件实现SIMULINK仿真模型到仿真器实时硬件代码的自动生成和下载,并提供ControlDesk人机界面软件方便实现硬件的图形化管理、用户虚拟仪表的建立、变量与参数的可视化管理等功能。dSPACE仿真器与工控机之间借助DS814、DS819通讯板卡通过光纤进行高速数据通讯。
3 实时仿真测试结果
牵引控制装置上载实际装车用版本的软件,MVB网络模拟器按照实车通讯协议模拟牵引控制装置的MVB网络环境。交流传动系统仿真模型采用电动车组的实车相关参数,经过编译下载到dSPACE硬件仿真器中运行,仿真时间步长设为50 μ s。仿真过程中,通过ControlDesk软件进行参数调整、变量观测及波形记录。
3.1 牵引工况仿真结果
在接触网压25 kV、手柄级位100%、牵引工况条件下,列车速度119 km/h、330 km/h时的仿真波形分别如图7、图8所示。其中图(a)是四象限变流器1的交流侧电压、电流波形;图(b)是PWM 逆变器的U相电压、U相电流波形。

图7 车速119 km/h牵引工况时的仿真波形

图8 车速330 km/h牵引工况时的仿真波形
3.2 电制动工况仿真结果
在接触网压25 kV、手柄级位100%、电制动工况条件下,列车速度119 km/h、330 km/h时的仿真波形分别如图9、图10所示。其中图(a)是四象限变流器1的交流侧电压、电流波形;图(b)是PWM 逆变器的 U相电压、U相电流波形。

图9 车速119 km/h电制动工况时的仿真波形
对比实车运行试验结果,图7~图10所示的仿真结果与试验结果相一致,从而验证了仿真模型的正确性及硬件在回路仿真测试系统的有效性。
4 结束语
建立了基于MATLAB/SIMULINK软件的电动车组交流传动系统主回路仿真模型,搭建了“实际牵引控制装置+dSPACE仿真器”的硬件在回路实时仿真测试系统。仿真结果与实车运行试验结果相一致,验证了仿真模型及硬件在回路仿真测试系统的有效性。

图10 车速330 km/h电制动工况时的仿真波形
该仿真测试系统已成功应用于电动车组交流传动系统的设计与验证,为我国高速动车组的自主创新提供了良好的技术支撑。
[1] P.Terwiesch,T.Keller,E.Scheiben.Rail vehicle control system integration testing using digital hardware-in-the-loop simulation[A].IEEE Transactions on Control Systems Technology,1999,7(3):352-362.
[2] 丁荣军,桂卫华,陈高华.电力机车交流传动系统的半实物实时仿真[J].中国铁道科学,2008,29(4):96-102.
[3] 卢子广,柴建云,王祥珩,等.电力驱动系统实时控制虚拟实验平台[J].中国电机工程学报,2002,23(4):119-123.
[4] 薛定宇,陈阳泉.基于MAT LAB/Simulink的系统仿真技术与应用[M].北京:清华大学出版社,2002.
[5] 丁荣军,黄济荣.现代变流技术与电气传动[M].北京:科学出版社,2008.
