瞬时频率方差加权导向最小方差波束形成检测器
2011-04-13陈阳赵安邦王自娟惠俊英
陈阳,赵安邦,王自娟,惠俊英
(哈尔滨工程大学 水声技术国家级重点实验室,黑龙江 哈尔滨 150001)
阵列信号处理诞生几十年来,已发展出许多成熟、系统的理论和技术[1-2],但由于实际声呐环境的复杂性,仍存在需要改进的地方.本文致力于提高基阵对线谱目标的检测能力,仿真和海试表明改进的方法能有效检测强干扰背景下线谱目标.
声呐视野中通常存在多个目标,波束主瓣接收了期望目标的信号,同时其旁瓣也接收了其他目标的信号,成为探测期望目标的干扰,称为“多目标干扰”.此时,理论上最佳阵列处理器是最小方差无畸变(minimum variance distortionless response,MVDR)波束形成器[3].
对于线谱,瞬时频率方差(variance of instantaneous frequency,VIF)[4]的估计值可作为检测统计量用于信号检测,在理想信道白噪声背景下的检测性能略低于最佳处理器(匹配滤波器),但差别很小.瞬时频率方差检测器的虚警率与干扰背景的能量起伏无关,因而在非平稳的干扰背景和信道中具有很好的稳健性[5].
水中航行器辐射噪声中线谱的谱级信噪比通常较连续谱高许多[6],如果充分利用这一特性,可以有效提高系统的检测性能.宽带信号分频带处理进行融合时,按各频带的信噪比进行加权是最优的[7].然而在实际应用中,线谱频率未知,各频带的信噪比也无法得知,因而一般假设各频带信噪比相同,即各频带的权相同;而由于线谱能量在宽带信号能量中所占比例很小,所形成的高性能空间谱被其他低信噪比频带形成的空间谱淹没.解决这一问题的一个途径是将各频带独立显示而不进行宽带融合,这就需要四维显示,但目前仍没有十分有效的四维显示方法.注意到,如果目标有线谱,该方位波束的瞬时频率方差很小甚至为零,否则就较大,利用频率方差对宽带方位谱进行加权,线谱目标方位的谱强度得到增强;而且由于不需显示每个频带的结果,可以通过常规的三维方位时间历程瀑布图显示.
1 MVDR波束形成
假设阵列由一组全向阵元组成,阵元的位置为pn(n=0,1,…,M-1,M为阵元数).阵列接收的快拍由信号和噪声组成,在频域表示为X(ω)= XS(ω)+N(ω),其中信号矢量可以写为

式中:N(ω)为噪声矢量;F(ω)是源信号的频域快拍;v(ω∶κS)=[e-jκTSp0,e-jκTSp1,…,e-jκTSpM-1]T是一个波数为κS的平面波对应的阵列流形矢量,κS=为单位矢量,λ为对应于频率ω的波长.噪声快拍N(ω)是零均值随机矢量,其互谱密度谱矩阵为Sn(ω)=I.阵列输入的互谱密度矩阵为

式中:Ss(ω)为期望目标的互谱密度矩阵,Sc(ω)为多目标干扰的互谱密度矩阵.利用权向量WH(ω)对X(ω)进行处理,波束输出为Y(ω)=WH(ω)X(ω).
对于宽带信号,分成若干频带,各频点的频域快拍矢量Xi(ωj),i=0,…,L-1,j=0,…,J-1,L为快拍数,J为频点数.各频点互谱密度矩阵通过快拍的时域平均得到其估计值:

MVDR波束形成最优权向量为

空间谱为

J个频点空间谱融合[8]:

2 导向最小方差波束形成
STMV是一种基于称为导向协方差矩阵(steered covariance matrix,STCM)的空时统计量的最优波束形成方法.STCM的自由度等于时间带宽积,因而只需要频点数与独立快拍数的积不小于阵元数即可达到满秩可逆,对于宽带信号,其收敛远快于MVDR.
指向协方差矩阵:
式中:

最优权为
式中:I为M×1的1向量.空间谱为

显然,当J=1时,pstmv(θ)=pwmvdr(κs),即当信号为窄带时,STMV与MVDR等价.
3 瞬时频率方差
文献[5]已经证明,对于线谱,瞬时频率方差是十分有效的检测量.窄带高斯白噪声的瞬时频率方差为有效带宽的平方,显著大于线谱信号的瞬时频率方差.
文献[5]还比较研究了多种瞬时频率方差估计方法:希尔伯特变换类的解析信号相位差分瞬时频率估计方法、过零频率估计器及其内插修正算法、窄带信号的自适应频率估计.由于宽带信号阵列处理采用频域处理,而上述方法均不适合用于频域处理,因而下面着重分析基于短时傅里叶时频分析的瞬时频率方差估计方法.
噪声中的线谱信号表示为

式中:As和φ0分别为线谱信号的幅度和初相位,信号带宽为B,噪声功率为.将信号以采样率fs采样、分段,每段长度为T(单位为s)做离散傅里叶变换.每段信号的离散傅里叶变换可以表示为

式中:Ss、Sn分别表示线谱信号和噪声分量;X、Y分别为Sx(k)的实部和虚部.频谱Sx(k)中幅值最大的频点即为瞬时频率.根据文献[12]时,X满足正态分布满足正态分布时,X和Y均满足正态分布于是,其包络 z=|Sx(k)|=满足莱斯分布[11]:

除线谱外其余所有频点的最大值x=max{|Sx(k)|,k≠k0}的分布函数为

其概率密度函数为

y=z-x的分布函数为

于是z<x的概率,即线谱频率幅值最大的概率为

其他频点最大的概率为

瞬时频率的均值为

瞬时频率的方差为
通过蒙特卡洛仿真验证上述理论.带宽0.5~1 kHz的高斯白噪声,线谱频率800 Hz,FFT窗长1 s,20 000次独立统计.和瞬时频率方差的理论值式(18)和蒙特卡洛仿真统计结果如图1和图2,两者完全一致.由图中可以看到,当线谱谱级信噪比超过一定门限时,瞬时频率方差为零.

图1 线谱频率幅值最大的概率f(k0)Fig.1 Probability of line spectrum to be the peak f(k0)
图2 短时傅里叶变换估计瞬时频率方差Fig.2 Variance of instantaneous frequency through STFT
4 频率方差加权STMV波束形成检测器
由上述可知,如果目标信号有线谱,只要波束输出中线谱谱级信噪比超过门限,其瞬时频率方差很小甚至为零,而如果目标信号为连续谱白噪声则瞬时频率方差较大,这种区别可以用于线谱目标检测.用各方位波束输出的瞬时频率方差作为权对阵列的STMV方位谱进行调整的检测器称为瞬时频率方差加权STMV波束形成检测器(VIF-STMV).如图3所示,阵列数据经滑动窗分成相互重叠的快拍,STMV波束形成输出分别进行能量积分和周期图谱估计;能量积分估计空间谱;周期图谱估计得到波束输出的功率谱,峰选确定最大谱线的频率,并统计该频率的方差,以方差的倒数作为系数对空间谱进行加权.
图3 VIF-STMV框图Fig.3 Diagram of variance of instantaneous frequencybeamforming detecting
不同的加权方法可以获得不同的效果,下面给出2种加权方法,倒数加权和指数加权:

式中:pstmv为STMV波束形成空间谱,σf为瞬时频率方差,Δ为一小量,它保证当瞬时频率方差为零时倒数权存在.
以阵元间距0.3 m的48元直线阵为例,112°方向存在一信噪比为15 dB强干扰(干扰1),13°和60°方向分别存在信噪比-13 dB、-18 dB两干扰(干扰2、3)73°方向为信噪比-18 dB的目标.其中干扰3和目标均含有1根线谱,分别为650 Hz和700 Hz,其谱级信噪比较连续谱高15 dB.信号频带为0.5~1 kHz,快拍长度为1 s,方位谱估计的积分时间为4s(4个独立快拍),功率谱估计的滑动步长为0.125 s.图4中实线为STMV方位谱,可以看到由于分辨力不够,无法分开干扰3和目标,也就是说,干扰3的存在影响了期望目标的检测.虚线为倒数加权的结果,由于干扰3和目标含有线谱,该方向方位谱加权较大,因而能清晰分辨干扰3和目标,干扰1和干扰2由于不含线谱,方位谱强度被抑制.点线为指数加权的结果,可以看到干扰1和干扰2方位谱强度被进一步抑制,旁瓣更平滑,更稳健.

图4 VIF-STMV仿真Fig.4 VIF-STMV suppress multisource interference
5 海试数据处理
为了验证该方法在工程应用中的有效性,在东海进行了海试,试验采用的接收阵为阵元间距0.3 m的48元拖曳线列阵.目标由远处以较快速度接近拖船.试验在渔期进行,加上试验海区靠近航道,因而在附近海域存在较多的其他船只的干扰.
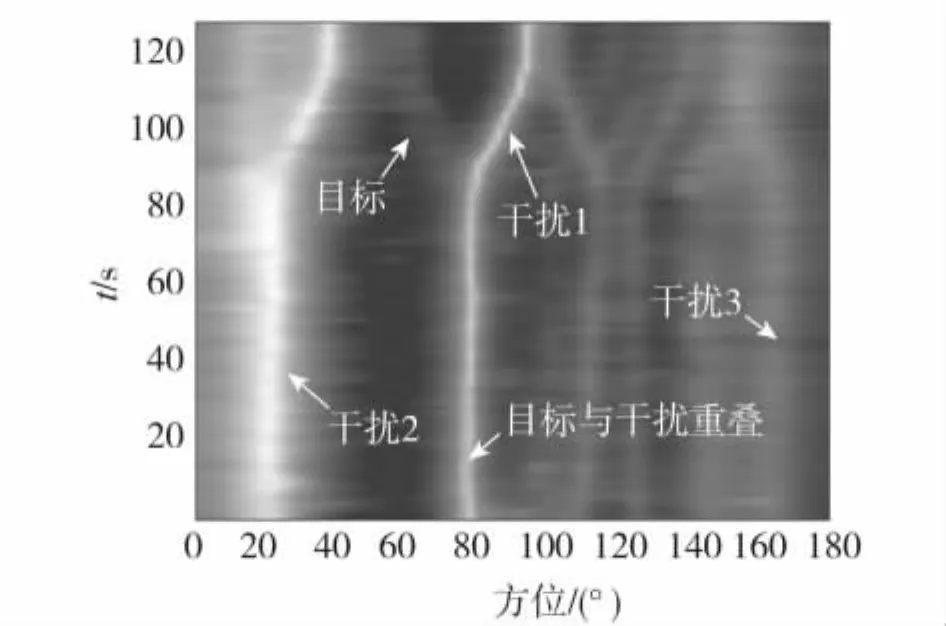
图5 STMV波束形成方位历程Fig.5 Bearing-time chart of STMV
图5为STMV波束形成方位历程图,从图中可以清晰看到至少6个目标的历程,期望目标和主要的几个干扰如图中标示.90 s后拖船转向,左右舷的目标分别向船艏和船尾方向偏移.前90 s,由于期望目标与干扰1方位重叠,目标被强干扰淹没,无法检测到目标.拖船转向后目标与该强干扰方位分开,可以较为明显的检测到目标.

图6 倒数加权VIF-STMV的方位历程Fig.6 Bearing-time chart of VIF-STMV (multiplicative inverse)
图6为倒数加权VIF-STMV的方位历程图结果,图7为指数加权VIF-STMV的方位历程图结果.从图中可以明显看到目标,90 s前位于70°附近,90 s后偏向0°方向.指数加权结果较倒数加权结果背景更干净.轨迹出现断裂是由于浅海声信道滤波效应引起的:浅海声信道是一梳状滤波器,子通带随信道的变化而变化,当线谱频率处于子止带时线谱信噪比显著降低使得瞬时频率方差变大.
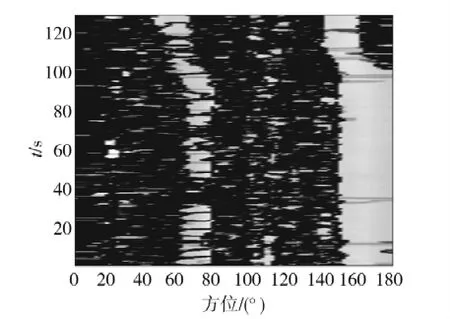
图7 指数加权VIF-STMV的方位历程Fig.7 Bearing-time chart of VIF-STMV (exponential weight)
进一步分析各目标信号的功率谱.图8为70°方向波束时频LOFAR图,可以看到90 s前的频谱存在线谱,为了确认该线谱属于目标,分析56°方向和90°方向波束时频LOFAR图,如图9和图10.56°方向波束时频LOFAR图出现该线谱,说明90 s之后目标进入该波束,而90°方向波束时频LOFAR图90 s之后频谱强度变大但没有线谱,可见是干扰1进入该波束,而且干扰1的频谱在该工作频段内无线谱.图11为20°方向(干扰2方位)波束的时频LOFAR图,频谱无线谱,因而尽管干扰2辐射噪声很强,在VIF-STMV方位历程图上仍然被抑制.图12为160°方向(干扰3方位)波束的时频LOFAR图,频谱存在一根线谱,因而干扰3在VIF-STMV方位历程图上被增强.
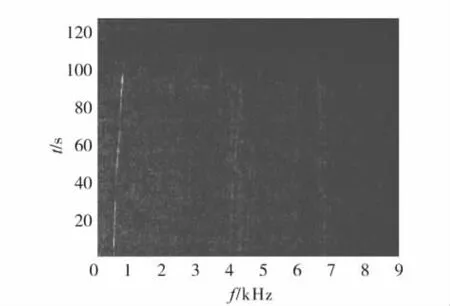
图8 70°方向波束时频LOFARFig.8 LOFAR at 70°

图9 56°方向波束时频LOFARFig.9 LOFAR at 56°
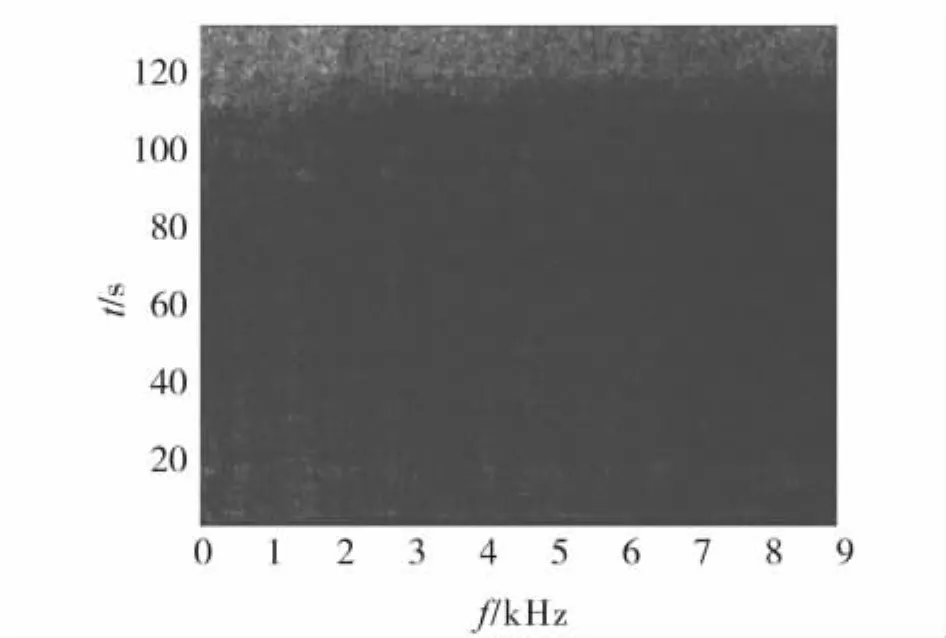
图10 90°方向波束时频LOFARFig.10 LOFAR at 90°
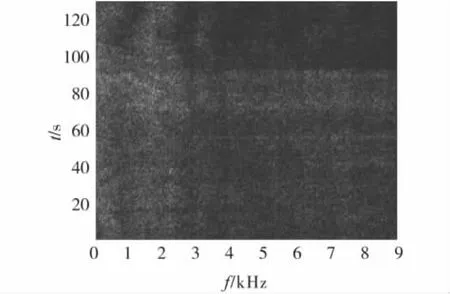
图11 20°方向波束时频LOFARFig.11 LOFAR at 20°
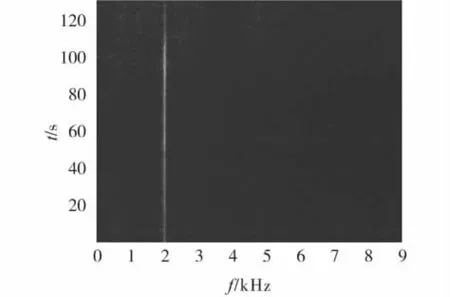
图12 160°方向波束时频LOFARFig.12 LOFAR at 160°
6 结束语
文中提出了频率方差加权导向最小方差波束形成检测器,利用目标辐射噪声中线谱有较高的强度和稳定度这个特征,用每个方位的波束输出的频率方差,对方位谱进行加权,得到线谱目标的方位-时间历程图,线谱目标方位波束因输出信号的瞬时频率方差较小得到增强,而其他方位波束被抑制.该检测器可有效抗多目标干扰,实现在强相干干扰中检测到弱线谱目标,且只须三维显示,避免了通常的线谱检测器须四维显示、观察费力的困扰.仿真和海试结果表明,在多目标、强干扰的环境下,频率方差加权导向最小方差波束形成检测器可远程探测线谱目标,与方位谱能量检测器比较,有更好的探测性能.
[1]Van TREES H L.Optimum array processing[J].New York:John Wiley&Sons Inc,2003:3-5.
[2]王永良,陈辉彭,应宁,万群.空间谱估计理论与算法[M].北京:清华大学出版社,2004:2-8.
WANG Yongliang,CHEN Huipeng,YING Ning,WAN Qun.Theories and algorithms of spectrum estimation[M].Beijing:Tsinghua University Press,2004:2-8.
[3]CAPON J.High-resolution frequency-wavenumber spectrum analysis[J].Proceedings of the IEEE,1969,57(8): 1408-1418.
[4]林茂庸,柯有安.雷达分辨理论[M].北京:国防工业出版社,1984:134-141.
LIN Maoyong,KE Youan.Rada resolution theory[M].Beijing:National Defence Industrial Press,1984:134-141.
[5]梁国龙.回波信号瞬时参数序列分析及其应用研究[D].哈尔滨:哈尔滨工程大学,1997:80-82.
LIANG Guolong.A study on instananeous parameter sequence analysis of echoes and its application[D].Harbin: Harbin Engineering University,1997:134-141.
[6]吴国清,李靖.舰船噪声识别-线谱稳定性和唯一性[J].声学学报,1999,24(1):6-11.
WU Guqing,LI Jing.Ship radiated-noise recognition-stability and uniqueness of line spectrum[J].Acta Acustica,1999,24(1):6-11.
[7]HUNG H,KAVEH M.Focussing matrices for coherent signal-subspace processing[J].IEEE Trans ASSP,1988,36 (8):1272-1281.
[8]KROLIK J,SWINGLER D.focused wide-band array processing by spatial resampling[J].IEEE Trans ASSP,1990,38(2):356-360.
[9]LIU W L,DING S X.An efficient method to determine the diagonal loading factor using the constant modulus feature[J].IEEE Trans SP,2008,56(12):6102-6106.
[10]KROLIK J,SWINGLER D.Multiple broadband source location using steered covariance matrices[J].IEEE Trans ASSP,1989,37(10):1481-1494.
[11]朱华,黄辉宁,李永庆,梅文博.随机信号分析[M].北京:北京理工大学出版社,1990:317-319.
ZHU Hua,HUANG Huining,LI Youqing,MEI Wenbo.Random signal analysis[M].Beijing:Beijing Institute of Technology Press,1990:317-319.
[12]WHALEN A D.Signal detecting in noise[M].Beijing: Science Press,2006:77-78.